一种用于无人驾驶的监控装置的制作方法
本技术涉及监控装置,尤其涉及一种用于无人驾驶的监控装置。
背景技术:
1、无人驾驶汽车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车,它是利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。
2、无人驾驶车在提高安全驾驶的同时,需要在汽车外围安装相应的监控设备对无人驾驶汽车进行实时安全监控,而监控设备在日常使用时,会因车辆行驶时产生的泥土飞溅,对监控设备的镜头造成遮挡,影响监控设备的正常使用,为此,我们提出一种用于无人驾驶的监控装置。
技术实现思路
1、本实用新型提出了一种用于无人驾驶的监控装置,解决了现有技术中,无人驾驶车在提高安全驾驶的同时,需要在汽车外围安装相应的监控设备对无人驾驶汽车进行实时安全监控,而监控设备在日常使用时,会因车辆行驶时产生的泥土飞溅,对监控设备的镜头造成遮挡,影响监控设备的正常使用”的技术问题。
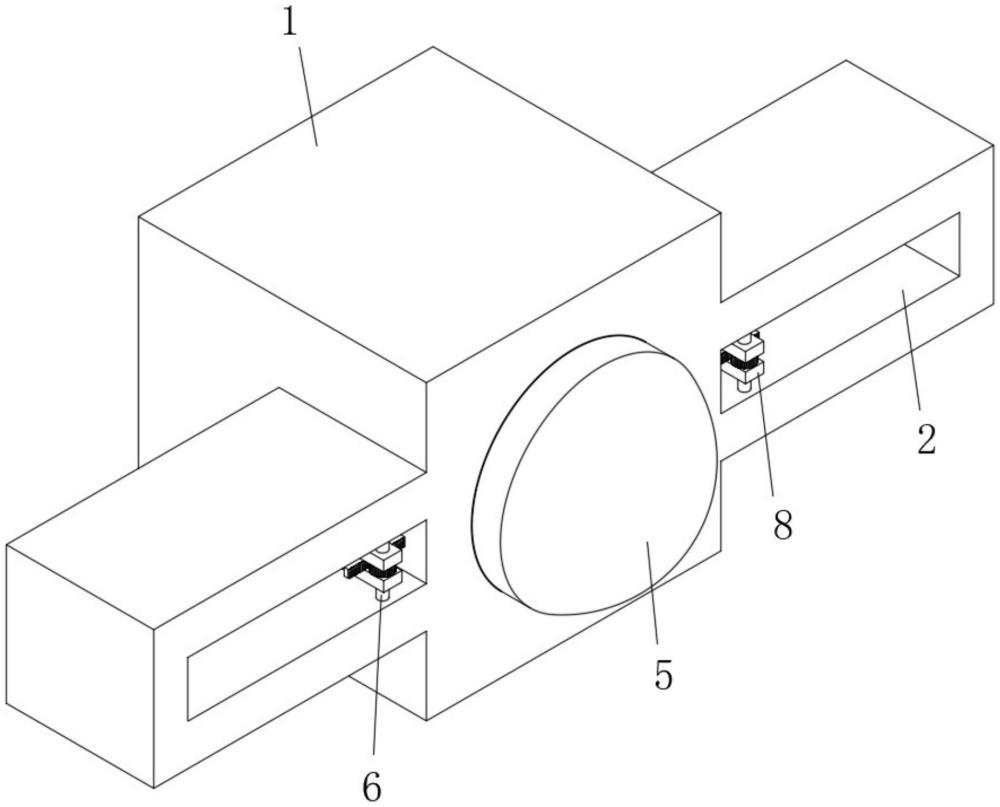
2、本实用新型提出的一种用于无人驾驶的监控装置,包括安装架,所述安装架外壁呈对称结构开设有两个安装槽,两个所述安装槽内壁活动安装有清洁组件,所述安装架内壁固设有固定套,所述固定套内壁固设有电机,所述安装架内壁安装有驱动组件,所述电机与驱动组件连接,所述驱动组件与两个清洁组件连接固定。
3、优选地,所述清洁组件包括有转轴,所述转轴与安装槽内壁转动连接,所述转轴圆周外壁固设有齿轮一,所述转轴圆周外壁固设有旋转臂,所述旋转臂端部固设有压臂,所述压臂外壁固设有清洁刷。
4、优选地,所述旋转臂为l形结构,所述旋转臂外壁开设有l型槽。
5、优选地,所述压臂外壁开设有弧形槽,所述清洁刷位于弧形槽内壁设置,所述清洁刷为弧形结构。
6、优选地,所述驱动组件包括有连接轴和两个连接板,所述连接轴圆周外壁固设有齿轮二,所述连接轴端部与电机连接固定,所述齿轮二顶部和底部均啮合有齿板二,两个所述连接板相对远离的一端均与安装架内壁滑动连接,两个所述连接板外端分别延伸至安装槽内部,两个所述连接板外端分别固设有齿板一,所述齿板一与齿轮一啮合,两个所述连接板内端分别固设有连接块,两个所述连接块分别与齿板二滑动连接,两个所述齿板二外壁均固设有固定板,两个所述连接块外壁均固设有滑杆,两个所述滑杆圆周外壁套设有弹簧,两个所述滑杆端部均贯穿固定板并与其滑动连接。
7、优选地,所述连接板为l形结构,所述连接板与l型槽内壁滑动接触。
8、优选地,所述弹簧一端与固定板连接固定,所述弹簧另一端与连接块连接固定。
9、优选地,所述安装架内壁转动连接有安装套,所述安装套内壁固设有无线监控器,所述安装套外壁固设有玻璃罩,所述安装套与连接轴连接固定。
10、本实用新型中的有益效果为:
11、1、通过电机带动连接轴转动,通过连接轴转动带动齿轮二转动,通过齿轮二带动两个齿板二反向移动,两个齿板二移动时分别带动固定板沿着滑杆滑动,并对弹簧产生挤压,直至齿轮二与两个齿板二上的最后一个齿啮合,此时齿板二移动时,在弹簧的的弹力作用下,会反向推动齿板二移动,从而使得齿板二移动一端距离后,能够在齿轮二的持续转动下与其啮合,齿板二移动时会通过齿板一推动齿轮一转动,齿轮一转动时带动转轴转动,转轴转动时会通过旋转臂带动压臂转动,压臂转动时会带动清洁刷转动,使得清洁刷会玻璃罩外壁贴合,通过连接轴带动安装套转动,从而使得玻璃罩与清洁刷产生摩擦,对玻璃罩上的泥土进行清理。
12、2、通过电机带动安装套转动,从而使得玻璃罩转动,通过连接轴转动带动齿轮二转动,通过齿轮二带动两个齿板二反向移动,两个齿板二移动时分别带动固定板沿着滑杆滑动,并对弹簧产生挤压,直至齿轮二与两个齿板二上的最后一个齿啮合,此时齿板二移动时,在弹簧的的弹力作用下,会反向推动齿板二移动,从而使得齿板二移动一端距离后,能够在齿轮二的持续转动下与其啮合,齿板二移动时会通过齿板一推动齿轮一转动,使得清洁刷会玻璃罩外壁贴合,此设计能够通过电机带动玻璃罩转动,同时带动旋转臂转动,使得清洁刷与玻璃罩贴合,实现结构之间的连动。
技术特征:
1.一种用于无人驾驶的监控装置,包括安装架(1),其特征在于:所述安装架(1)外壁呈对称结构开设有两个安装槽(2),两个所述安装槽(2)内壁活动安装有清洁组件,所述安装架(1)内壁固设有固定套(11),所述固定套(11)内壁固设有电机(12),所述安装架(1)内壁安装有驱动组件,所述电机(12)与驱动组件连接,所述驱动组件与两个清洁组件连接固定。
2.根据权利要求1所述的用于无人驾驶的监控装置,其特征在于:所述清洁组件包括有转轴(6),所述转轴(6)与安装槽(2)内壁转动连接,所述转轴(6)圆周外壁固设有齿轮一(7),所述转轴(6)圆周外壁固设有旋转臂(8),所述旋转臂(8)端部固设有压臂(9),所述压臂(9)外壁固设有清洁刷(10)。
3.根据权利要求2所述的用于无人驾驶的监控装置,其特征在于:所述旋转臂(8)为l形结构,所述旋转臂(8)外壁开设有l型槽。
4.根据权利要求3所述的用于无人驾驶的监控装置,其特征在于:所述压臂(9)外壁开设有弧形槽,所述清洁刷(10)位于弧形槽内壁设置,所述清洁刷(10)为弧形结构。
5.根据权利要求1所述的用于无人驾驶的监控装置,其特征在于:所述驱动组件包括有连接轴(13)和两个连接板(15),所述连接轴(13)圆周外壁固设有齿轮二(14),所述连接轴(13)端部与电机(12)连接固定,所述齿轮二(14)顶部和底部均啮合有齿板二(18),两个所述连接板(15)相对远离的一端均与安装架(1)内壁滑动连接,两个所述连接板(15)外端分别延伸至安装槽(2)内部,两个所述连接板(15)外端分别固设有齿板一(16),所述齿板一(16)与齿轮一(7)啮合,两个所述连接板(15)内端分别固设有连接块(17),两个所述连接块(17)分别与齿板二(18)滑动连接,两个所述齿板二(18)外壁均固设有固定板(19),两个所述连接块(17)外壁均固设有滑杆(20),两个所述滑杆(20)圆周外壁套设有弹簧(21),两个所述滑杆(20)端部均贯穿固定板(19)并与其滑动连接。
6.根据权利要求5所述的用于无人驾驶的监控装置,其特征在于:所述连接板(15)为l形结构,所述连接板(15)与l型槽内壁滑动接触。
7.根据权利要求6所述的用于无人驾驶的监控装置,其特征在于:所述弹簧(21)一端与固定板(19)连接固定,所述弹簧(21)另一端与连接块(17)连接固定。
8.根据权利要求1所述的用于无人驾驶的监控装置,其特征在于:所述安装架(1)内壁转动连接有安装套(3),所述安装套(3)内壁固设有无线监控器(4),所述安装套(3)外壁固设有玻璃罩(5),所述安装套(3)与连接轴(13)连接固定。
技术总结
本技术属于监控装置技术领域,公开了一种用于无人驾驶的监控装置,包括安装架,所述安装架外壁呈对称结构开设有两个安装槽,两个所述安装槽内壁活动安装有清洁组件,所述安装架内壁固设有固定套,所述固定套内壁固设有电机,所述安装架内壁安装有驱动组件,所述电机与驱动组件连接,所述驱动组件与两个清洁组件连接固定。本技术通过电机带动连接轴转动,通过连接轴转动带动齿轮二转动,通过齿轮二带动两个齿板二反向移动,齿板二移动时会通过齿板一推动齿轮一转动,使得压臂转动时会带动清洁刷转动,使得清洁刷会玻璃罩外壁贴合,通过连接轴带动安装套转动,从而使得玻璃罩与清洁刷产生摩擦,对玻璃罩上的泥土进行清理。
技术研发人员:张振操
受保护的技术使用者:张振操
技术研发日:20230905
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!