一种机器人行走装置的制作方法
本申请属于机器人领域,尤其涉及一种机器人行走装置。
背景技术:
1、风机运行、维护问题引起重点关注,在役风力发电机组叶片运行环境恶劣,表面容易产生点蚀、裂纹、褶皱等问题,如未能及时发现并得到有效修复,将会迅速扩大,产生疲劳破坏,从而引起重大经济损失及安全事故的发生。
2、传统的叶片检测方式一般是人工吊篮、地面相机、无人机相机三种。其中人工吊篮对操作人员的技术要求极高,检测成本较高;地面相机在获取图像时会因为拍照角度的问题而无法识别;无人机相机的采购及检测成本过高,且需要专业看图识别的工作人员,同时无人机的续航能力弱也是这种检测方式的短板。因此比较实用检测方式是通过机器人进行检测,由于风机一般是建地形比较崎岖的山路,传统的机器人在这些山路行走时容易侧翻,此外由于风机的立柱表面为曲面结构,机器人在其上爬升过程中,两个滚轮之间不能保持在同一平面,所以传统的机器人在其上爬升过程中稳定性较差,而且无法适应差速转向。
技术实现思路
1、本申请实施例提供了一种机器人行走装置,提高机器人行走过程中的稳定性,很方便实现机器人在曲面的转向。
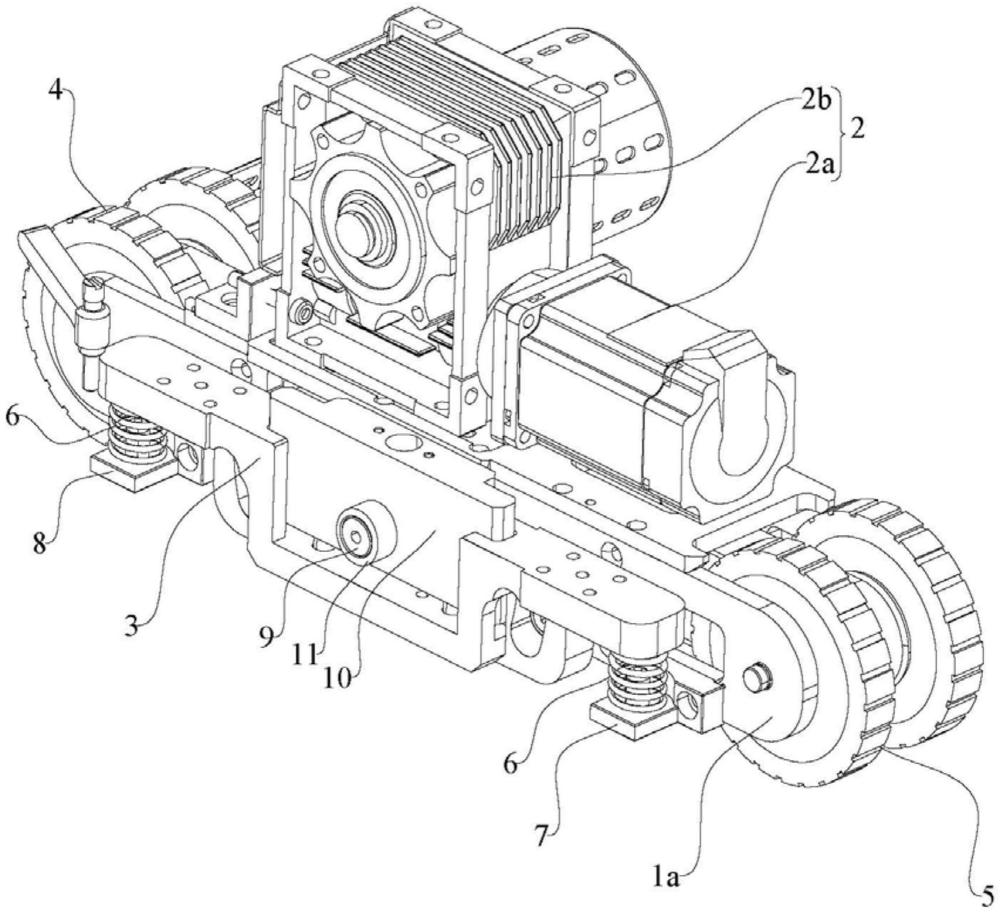
2、一种机器人行走装置,包括:
3、基座,所述基座的一端安装第一滚轮,另一端安装第二滚轮;
4、驱动装置,所述驱动装置安装在所述基座上,所述驱动装置的动力输出端与所述第一滚轮传动连接;
5、浮座,所述浮座用于连接机器人主体,所述浮座的两端通过弹性部件与所述基座连接,所述浮座的中部与所述基座转动连接,所述浮座能够以其与所述基座的转动连接处为圆心进行旋转。
6、根据本实用新型的另一些实施例的机器人行走装置,所述驱动装置与所述第一滚轮之间设有传动装置,所述传动装置包括主动轮、从动轮和第一同步带,所述主动轮安装在所述驱动装置的动力输出端,所述从动轮与所述第一滚轮连接,所述第一同步带连接所述主动轮和所述从动轮。
7、根据本实用新型的另一些实施例的机器人行走装置,所述传动装置的外部设置罩壳,所述罩壳与所述驱动装置连接。
8、根据本实用新型的另一些实施例的机器人行走装置,所述浮座设在所述基座的侧边,所述基座的侧边设有第一支撑块和第二支撑块,所述第一支撑块和所述第二支撑块沿所述基座的长度方向间隔布置,所述浮座的一端通过所述弹性部件连接在所述第一支撑块上,所述浮座的另一端通过所述弹性部件连接在所述第二支撑块上。
9、根据本实用新型的另一些实施例的机器人行走装置,所述基座包括第一侧板、第二侧板和连接件,所述第一侧板和所述第二侧板相对间隔布置,所述连接件连接在所述第一侧板和所述第二侧板之间。
10、根据本实用新型的另一些实施例的机器人行走装置,所述第一滚轮与所述第二滚轮之间通过第二同步带传动连接,所述第二同步带位于所述第一侧板和所述第二侧板之间。
11、根据本实用新型的另一些实施例的机器人行走装置,所述第一侧板与所述第二侧板之间设有预紧装置,所述预紧装置包括支撑轴、调节螺栓和滚轴,所述支撑轴设在所述第一侧板和所述第二侧板之间,所述滚轴转动安装在所述支撑轴上并与所述第二同步带贴合,所述第一侧板和所述第二侧板上均设有所述调节螺栓,所述调节螺栓与所述支撑轴螺纹连接。
12、根据本实用新型的另一些实施例的机器人行走装置,所述基座上设有转轴,所述浮座的中部可拆卸安装连接块,所述连接块上设有轴套,所述转轴装配在所述轴套中,所述轴套能够相对所述转轴旋转。
13、根据本实用新型的另一些实施例的机器人行走装置,所述基座上设有第一限位块和第二限位块,所述第一限位块和所述第二限位块分别位于所述转轴的两侧,所述浮座上设有第一导槽和第二导槽,所述第一导槽和所述第二导槽分别位于所述连接块的两侧,所述第一限位块滑动装配在所述第一导槽中,所述第二限位块滑动装配在所述第二导槽中。
14、根据本实用新型的另一些实施例的机器人行走装置,所述第一滚轮和所述第二滚轮均为滚花聚氨酯包胶轮。
15、本实用新型实施例的机器人行走装置至少具有如下有益效果:机器人行走过程中,驱动装置驱动第一滚轮旋转,由于浮座的中部与基座转动连接,浮座的两端通过弹性部件与基座连接,所以整个浮座是一个中间可以旋转,两端可以活动的跷跷板结构,当机器人行走至比较崎岖的位置时,行走装置会上下起伏,而机器人主体保持稳定,所以跷跷板结构的浮座不仅仅实现了行走装置与机器人主体之间的连接,还起到了减震的效果,提高机器人行走过程中的稳定性,机器人在风机立柱上的曲面行走过程中,当机器人需要进行差速转向时,同样的,跷跷板结构的浮座也能很方便实现机器人在曲面的转向。
技术特征:
1.一种机器人行走装置,其特征在于,包括:
2.根据权利要求1所述的机器人行走装置,其特征在于,所述驱动装置与所述第一滚轮之间设有传动装置,所述传动装置包括主动轮、从动轮和第一同步带,所述主动轮安装在所述驱动装置的动力输出端,所述从动轮与所述第一滚轮连接,所述第一同步带连接所述主动轮和所述从动轮。
3.根据权利要求2所述的机器人行走装置,其特征在于,所述传动装置的外部设置罩壳,所述罩壳与所述驱动装置连接。
4.根据权利要求1所述的机器人行走装置,其特征在于,所述浮座设在所述基座的侧边,所述基座的侧边设有第一支撑块和第二支撑块,所述第一支撑块和所述第二支撑块沿所述基座的长度方向间隔布置,所述浮座的一端通过所述弹性部件连接在所述第一支撑块上,所述浮座的另一端通过所述弹性部件连接在所述第二支撑块上。
5.根据权利要求1所述的机器人行走装置,其特征在于,所述基座包括第一侧板、第二侧板和连接件,所述第一侧板和所述第二侧板相对间隔布置,所述连接件连接在所述第一侧板和所述第二侧板之间。
6.根据权利要求5所述的机器人行走装置,其特征在于,所述第一滚轮与所述第二滚轮之间通过第二同步带传动连接,所述第二同步带位于所述第一侧板和所述第二侧板之间。
7.根据权利要求6所述的机器人行走装置,其特征在于,所述第一侧板与所述第二侧板之间设有预紧装置,所述预紧装置包括支撑轴、调节螺栓和滚轴,所述支撑轴设在所述第一侧板和所述第二侧板之间,所述滚轴转动安装在所述支撑轴上并与所述第二同步带贴合,所述第一侧板和所述第二侧板上均设有所述调节螺栓,所述调节螺栓与所述支撑轴螺纹连接。
8.根据权利要求1所述的机器人行走装置,其特征在于,所述基座上设有转轴,所述浮座的中部可拆卸安装连接块,所述连接块上设有轴套,所述转轴装配在所述轴套中,所述轴套能够相对所述转轴旋转。
9.根据权利要求8所述的机器人行走装置,其特征在于,所述基座上设有第一限位块和第二限位块,所述第一限位块和所述第二限位块分别位于所述转轴的两侧,所述浮座上设有第一导槽和第二导槽,所述第一导槽和所述第二导槽分别位于所述连接块的两侧,所述第一限位块滑动装配在所述第一导槽中,所述第二限位块滑动装配在所述第二导槽中。
10.根据权利要求1所述的机器人行走装置,其特征在于,所述第一滚轮和所述第二滚轮均为滚花聚氨酯包胶轮。
技术总结
本申请属于机器人领域,尤其涉及一种机器人行走装置,包括基座,一端安装第一滚轮,另一端安装第二滚轮;驱动装置,安装在基座上,驱动装置的动力输出端与第一滚轮传动连接;浮座,浮座的两端通过弹性部件与基座连接,浮座的中部与基座转动连接。整个浮座是一个中间可以旋转,两端可以活动的跷跷板结构,跷跷板结构的浮座不仅仅实现了行走装置与机器人主体之间的连接,还起到了减震的效果,提高机器人行走过程中的稳定性,机器人在风机立柱上的曲面行走过程中,当机器人需要进行差速转向时,同样的,跷跷板结构的浮座也能很方便实现机器人在曲面的转向。
技术研发人员:谭文芳
受保护的技术使用者:西安麟光电子科技有限公司
技术研发日:20230912
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!