一种牵引车分布式同步控制方法、装置及储存介质与流程
本发明属于牵引车控制,具体涉及一种牵引车分布式同步控制方法、装置及储存介质。
背景技术:
1、目前,地铁牵引车市场主要以一个车头提供动力,后面牵引均为负载,市场上牵扯车大部分为45t常规牵引机头,随着需求的上升,目前市场需要55t往上的牵引车机头,而为了满足市场多样化需求,提供更好的动力控制系统,引入了分布式动力牵引控制。
2、分布式牵引控制能够实现低成本动力升级,但是目前市场上各种不同电机系统机车动力升级后,容易出现前后动力分布不均的情况,导致牵引车的打滑与动力分配异常问题,使得牵引车动力输出不稳定导致行驶不稳定。
技术实现思路
1、本发明要解决的技术问题在于克服现有技术的不足,提供一种一种牵引车分布式同步控制方法、装置及储存介质,用于解决分布式牵引车动力分布不均的问题。
2、第一方面,本发明解决上述技术问题的技术方案如下:一种牵引车分布式同步控制方法,其包括:
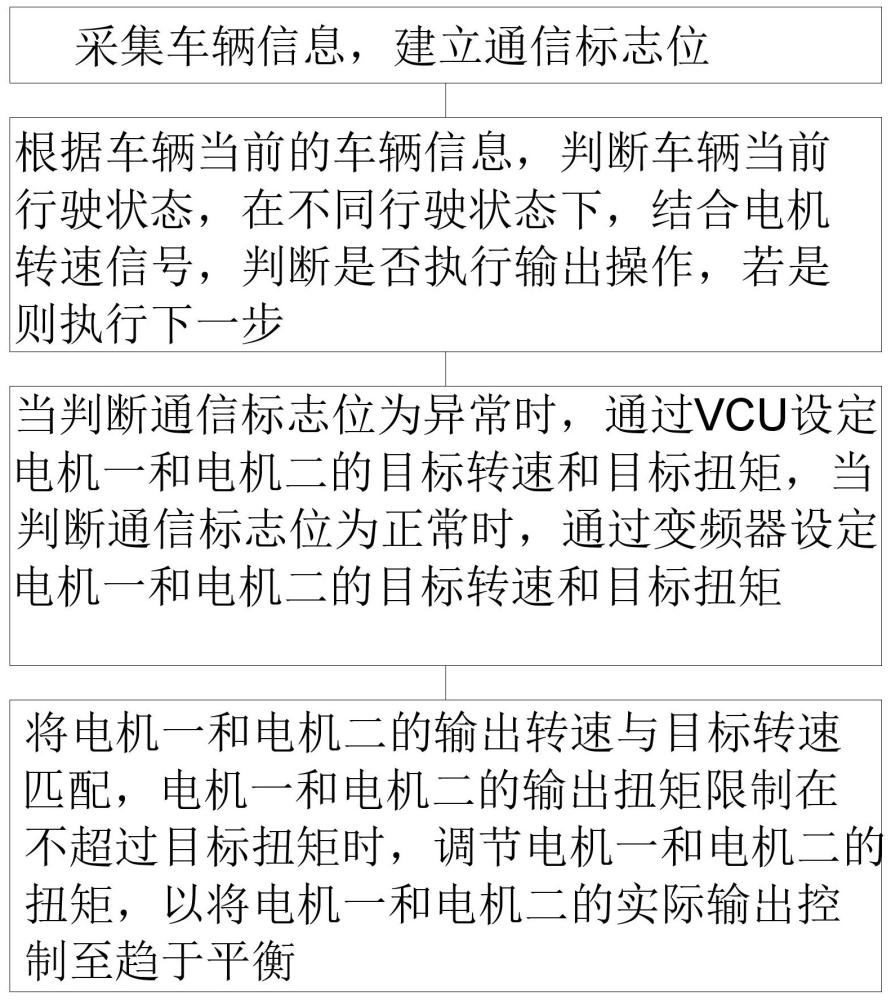
3、s1、采集车辆信息,建立通信标志位;
4、s2、根据车辆当前的车辆信息,判断车辆当前行驶状态,在不同行驶状态下,结合电机转速信号,判断是否执行输出操作,若是则执行步骤s3;
5、s3、当判断通信标志位为异常时,通过vcu设定电机一和电机二的目标转速和目标扭矩,当判断通信标志位为正常时,通过变频器设定电机一和电机二的目标转速和目标扭矩;
6、s4、将电机一和电机二的输出转速与目标转速匹配,电机一和电机二的输出扭矩限制在不超过目标扭矩时,调节电机一和电机二的扭矩,以将电机一和电机二的实际输出控制至趋于平衡;
7、其中,目标扭矩通过比较根据不同车辆信息而建立的不同扭矩值获取。
8、进一步地,所述步骤s2具体包括以下步骤:
9、s2.1、判断是否检测到急停信号,若是进入步骤2,若否进入步骤3;
10、s2.2、判断电机转速信号是否为0,若是则判定执行输出操作,若否则判定不执行输出操作;
11、s2.3、判断是否检测到n挡信号,若是则进入步骤4,若否则进入步骤5;
12、s2.4、判断是否检测到缓进信号,若是则判定执行输出操作,若否则进入步骤6;
13、s2.5、判断是否检测到多段速移动信号,若是则判定执行输出操作,若否则判定不执行输出操作;
14、s2.6、判断是否检测到缓退信号,若是则判定执行输出操作,若否则判定不执行输出操作。
15、进一步地,在检测到缓进信号和缓退信号之后,分别加入故障判断,具体为:判断是否检测到电机故障,若是则进入停机模式,若否则继续执行输出操作。
16、进一步地,所述建立通信标志位包括:
17、持续检测变频器的反馈报文,若连续a秒检测不到所述反馈报文,则判定通信标志位为异常;
18、若连续b秒检测到所述反馈报文,则判定通信标志位为正常。
19、进一步地,当通信标志位为正常时,所述目标转速确定如下:所述目标转速=电机设定频率*主动力车轮半径*分布式动力传动比*60 / (主动力传动比*分布式传动比*主动力电机极对数);
20、当通信标志位位异常时,所述目标转速根据不同挡位设定。
21、进一步地,当通信标志位为正常时,所述目标扭矩的确定包括以下步骤:
22、根据变频器输出功率百分比与分布式额定功率,建立对应的扭矩值x1;
23、根据变频器输出扭矩百分比与分布式额定扭矩,建立对应的扭矩值x2;
24、根据电机一的温度和电机控制器一的温度,建立所对应的扭矩值x3;
25、根据电机二的温度和电机控制器二的温度,建立所对应的扭矩值x4;
26、对比x1、x2、x3的值,以其中最小值为电机一的目标扭矩;
27、对比x1、x2、x4的值,以其中最小值为电机二的目标扭矩。
28、进一步地,当通信标志位为异常时,所述目标扭矩的确定包括以下步骤:
29、根据电机一转速和电机二转速对应的最大驱动扭矩建立二维查表函数,查表获取扭矩值x5;
30、根据电机一温度和电机二温度对应的最大功率建立二维查表函数,结合实际转速计算得出扭矩值x6;
31、根据电机控制器一温度和电机控制器二温度对应的最大功率建立二维查表函数,结合实际转速计算得出扭矩值x7;
32、根据电机控制器一的故障等级确定驱动功率,结合实际转速计算得出扭矩值x8;
33、根据电机控制器二的故障等级确定驱动功率,结合实际转速计算得出扭矩值x9;
34、对比x5、x6、x7、x8的值,以其中最小值为电机一的目标扭矩;
35、对比x5、x6、x7、x9的值,以其中最小值为电机二的目标扭矩。
36、进一步地,所述故障等级包括:轻微故障、中等故障及严重故障;
37、当判定为轻微故障时,控制电机以峰值功率输出;
38、当判定为中等故障时,控制电机降功率以额定功率的一定比例输出;
39、当判定为严重故障时,控制电机输出功率为零。
40、第二方面,本发明还公开一种牵引车分布式同步控制装置,其包括:
41、信息采集模块,用于采集车辆信息,建立通信标志位;
42、判断模块,用于根据车辆当前的车辆信息,判断车辆当前行驶状态,在不同行驶状态下,结合电机转速信号,判断是否执行输出操作,若是则执行下一步;
43、同步控制模块,用于当判断通信标志位为异常时,通过vcu设定电机一和电机二的目标转速和目标扭矩;当判断通信标志位为正常时,通过变频器设定电机一和电机二的目标转速和目标扭矩;
44、控制执行模块,用于将电机一和电机二的输出转速与目标转速匹配,电机一和电机二的输出扭矩限制在不超过目标扭矩时,调节电机一和电机二的扭矩,以将电机一和电机二的实际输出控制至趋于平衡;
45、其中,目标扭矩通过比较根据不同车辆信息而建立的不同扭矩值获取。
46、进一步地,所述判断模块具体用于判断车辆当前行驶状态包括以下顺序步骤:
47、1)判断是否检测到急停信号,若是进入步骤2,若否进入步骤3;
48、2)判断电机转速信号是否为0,若是则判定执行输出操作,若否则判定不执行输出操作;
49、3)判断是否检测到n挡信号,若是则进入步骤4,若否则进入步骤5;
50、4)判断是否检测到缓进信号,若是则判定执行输出操作,若否则进入步骤6;
51、5)判断是否检测到多段速移动信号,若是则判定执行输出操作,若否则判定不执行输出操作;
52、6)判断是否检测到缓退信号,若是则判定执行输出操作,若否则判定不执行输出操作。
53、进一步地,所述判断模块还用于在检测到缓进信号和缓退信号之后,分别加入故障判断,具体为:判断是否检测到电机故障,若是则进入停机模式,若否则继续执行输出操作。
54、进一步地,同步控制模块还用于所述建立通信标志位,其包括:
55、持续检测变频器的反馈报文,若连续a秒检测不到所述反馈报文,则判定通信标志位为异常;
56、若连续b秒检测到所述反馈报文,则判定通信标志位为正常。
57、进一步地,同步控制模块还用于当通信标志位为正常时,所述目标转速确定如下:所述目标转速=电机设定频率*主动力车轮半径*分布式动力传动比*60 / (主动力传动比*分布式传动比*主动力电机极对数);当通信标志位位异常时,所述目标转速根据不同挡位设定。
58、进一步地,同步控制模块还用于当通信标志位为正常时,所述目标扭矩的确定包括以下步骤:
59、根据变频器输出功率百分比与分布式额定功率,建立对应的扭矩值x1;
60、根据变频器输出扭矩百分比与分布式额定扭矩,建立对应的扭矩值x2;
61、根据电机一的温度和电机控制器一的温度,建立所对应的扭矩值x3;
62、根据电机二的温度和电机控制器二的温度,建立所对应的扭矩值x4;
63、对比x1、x2、x3的值,以其中最小值为电机一的目标扭矩;
64、对比x1、x2、x4的值,以其中最小值为电机二的目标扭矩。
65、进一步地,同步控制模块还用于当通信标志位为异常时,所述目标扭矩的确定包括以下步骤:
66、根据电机一转速和电机二转速对应的最大驱动扭矩建立二维查表函数,查表获取扭矩值x5;
67、根据电机一温度和电机二温度对应的最大功率建立二维查表函数,结合实际转速计算得出扭矩值x6;
68、根据电机控制器一温度和电机控制器二温度对应的最大功率建立二维查表函数,结合实际转速计算得出扭矩值x7;
69、根据电机控制器一的故障等级确定驱动功率,结合实际转速计算得出扭矩值x8;
70、根据电机控制器二的故障等级确定驱动功率,结合实际转速计算得出扭矩值x9;
71、对比x5、x6、x7、x8的值,以其中最小值为电机一的目标扭矩;
72、对比x5、x6、x7、x9的值,以其中最小值为电机二的目标扭矩。
73、进一步地,还包括故障判断模块,所述故障等级包括:轻微故障、中等故障及严重故障;
74、所述故障判断模块具体用于:
75、当判定为轻微故障时,控制电机以峰值功率输出;
76、当判定为中等故障时,控制电机降功率以额定功率的一定比例输出;
77、当判定为严重故障时,控制电机输出功率为零。
78、第三方面,本发明还公开一种存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如上述控制方法的步骤。
- 还没有人留言评论。精彩留言会获得点赞!