一种基于车道中心线的车辆与静态障碍物碰撞判断方法与流程
本申请涉及自动驾驶领域,尤其涉及一种基于车道中心线的车辆与静态障碍物碰撞判断方法。
背景技术:
1、随着科技的发展,自动驾驶技术被广泛应用。但在自动驾驶车辆运行过程中,尤其是在港口,会遇到道路边沿或路面的固定静态障碍物。通常商用地图会生成的车道中心线,而自动驾驶车辆则沿着车道中心线行驶。但商用地图无法提前获取,只能车辆行驶到现场才能获得。为了车辆行驶安全,需保证车辆在沿着车道线中心线循迹行驶时,不会与静态障碍物发生碰撞碰撞。目前的技术方案,需要车辆在港口现场反复测试,调整车道中心线,使其满足要求,而该过程会消耗大量的人力和物力。
技术实现思路
1、有鉴于此,本发明提供一种基于车道中心线的车辆与静态障碍物碰撞判断方法,以解决现有技术需要车辆在港口现场反复测试,调整车道中心线,导致消耗大量人力和物力的技术问题。
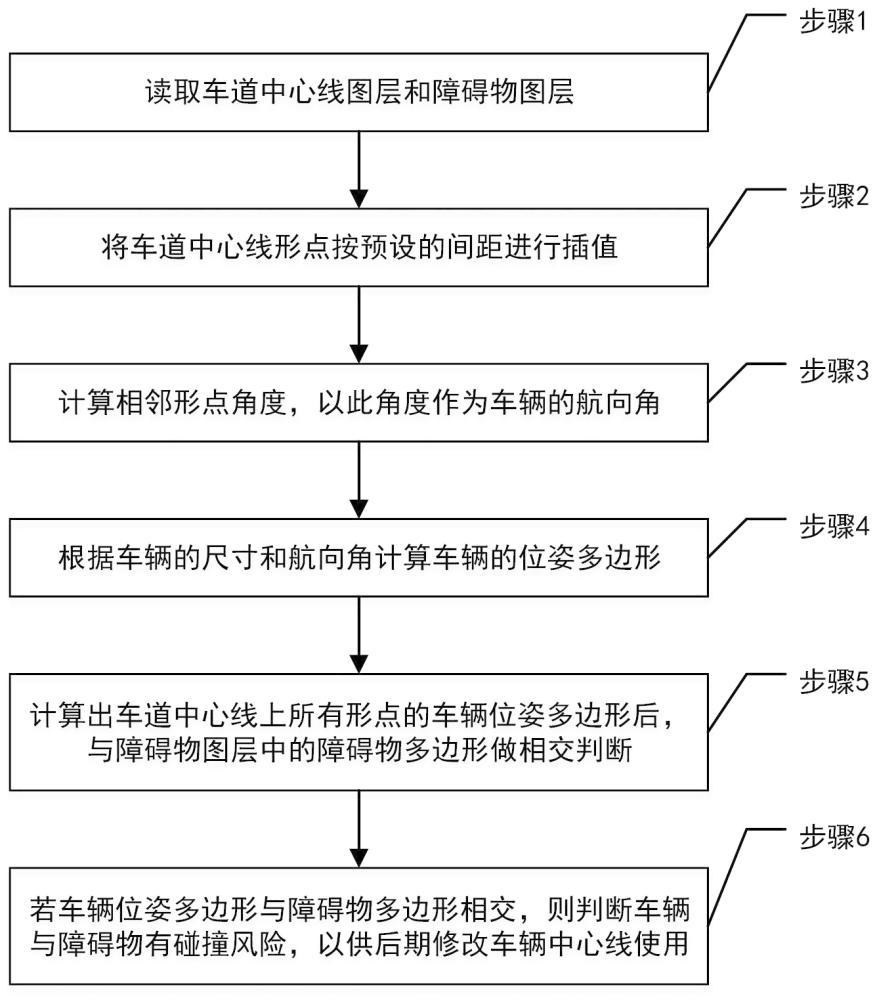
2、本发明提供一种基于车道中心线的车辆与静态障碍物碰撞判断方法,所述方法包括:步骤1:读取车道中心线图层和障碍物图层;步骤2:将车道中心线形点按预设的间距进行插值;步骤3:计算相邻形点角度,以此角度作为车辆的航向角;步骤4:根据车辆的尺寸和航向角计算车辆的位姿多边形;步骤5:计算出车道中心线上所有形点的车辆位姿多边形后,与障碍物图层中的障碍物多边形做相交判断;步骤6:若车辆位姿多边形与障碍物多边形相交,则判断车辆与障碍物有碰撞风险,以供后期修改车辆中心线使用。
3、进一步的,所述预设的间距为0.5米。
4、进一步的,所述步骤3包括:步骤31:获取相邻两形点a和b在笛卡尔坐标系下的坐标;步骤32:将a和b的坐标代入函数式:δx = b.x - a.x,δy = b.y - a.y;步骤33:根据δx和δy,利用反正切函数,求出线段ab与x轴的夹角theta。
5、进一步的,所述步骤4包括:步骤41:将形点a作为车辆的中心点,根据车辆的尺寸求出车身与x轴夹角为90度时的四个顶点;步骤42:将车辆逆时针旋转(90-theta)度,得到车辆航向角为theta时,车辆的四个顶点;步骤43:根据车辆航向角为theta时的四个顶点,计算出车辆位姿多边形。
6、进一步的,所述步骤42包括:步骤421:以原笛卡尔坐标系原点为轴,逆时针旋转θ角,获取新笛卡尔坐标系;步骤422:车辆顶点p与原点之间的向量记为r,在原坐标系中坐标记为(x,y),根据以下函数计算新坐标系中坐标(x',y'):x = x'*cos(θ)- y'*sin(θ),y =y'*cos(θ) + x'*cos(θ);步骤423:将车辆的其它三个顶点通过步骤422,得到新坐标系中的坐标。
7、进一步的,所述车辆航向角theta与旋转角θ相等。
8、进一步的,所述步骤3还包括:步骤34:将车道中心线上所有形点根据步骤31至步骤33求出相邻形点角度。
9、进一步的,所述车道中心线上倒数第一个形点与倒数第二个形点使用相同的相邻形点角度。
10、进一步的,所述方法还包括:步骤7:若车辆位姿多边形与障碍物多边形不相交,则车辆继续行驶。
11、本发明提供一种基于车道中心线的车辆与静态障碍物碰撞判断方法,该方法通过车辆中心线形点插值,并计算相邻形点角度,以此获取车辆的位姿多边形,再判断车辆位姿多边形与障碍物多边形是否相交,若相交,则说明车辆与障碍物有碰撞风险,以供后期修改车辆中心线使用。该技术方案主要用于解决现有技术需要车辆在港口现场反复测试,调整车道中心线,导致消耗大量人力和物力的技术问题。
技术特征:
1.一种基于车道中心线的车辆与静态障碍物碰撞判断方法,其特征在于,所述方法包括:
2.根据权利要求1所述一种基于车道中心线的车辆与静态障碍物碰撞判断方法,其特征在于,所述预设的间距为0.5米。
3.根据权利要求1所述一种基于车道中心线的车辆与静态障碍物碰撞判断方法,其特征在于,所述步骤3包括:
4.根据权利要求3所述一种基于车道中心线的车辆与静态障碍物碰撞判断方法,其特征在于,所述步骤4包括:
5.根据权利要求4所述一种基于车道中心线的车辆与静态障碍物碰撞判断方法,其特征在于,所述步骤42包括:
6.根据权利要求5所述一种基于车道中心线的车辆与静态障碍物碰撞判断方法,其特征在于,所述车辆航向角theta与旋转角θ相等。
7.根据权利要求3所述一种基于车道中心线的车辆与静态障碍物碰撞判断方法,其特征在于,所述步骤3还包括:
8.根据权利要求7所述一种基于车道中心线的车辆与静态障碍物碰撞判断方法,其特征在于,所述车道中心线上倒数第一个形点与倒数第二个形点使用相同的相邻形点角度。
9.根据权利要求1所述一种基于车道中心线的车辆与静态障碍物碰撞判断方法,其特征在于,所述方法还包括:
技术总结
本发明提供一种基于车道中心线的车辆与静态障碍物碰撞判断方法,所述方法包括:步骤1:读取车道中心线图层和障碍物图层;步骤2:将车道中心线形点按预设的间距进行插值;步骤3:计算相邻形点角度,以此角度作为车辆的航向角;步骤4:根据车辆的尺寸和航向角计算车辆的位姿多边形;步骤5:计算出车道中心线上所有形点的车辆位姿多边形后,与障碍物图层中的障碍物多边形做相交判断;步骤6:若车辆位姿多边形与障碍物多边形相交,则判断车辆与障碍物有碰撞风险,以供后期修改车辆中心线使用。解决现有技术需要在现场反复测试,调整车道中心线,导致消耗大量人力物力的问题。
技术研发人员:徐科,骆嫚,曹恺,熊胜健,李洪波
受保护的技术使用者:东风悦享科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!