基于后悬空气悬架的车高控制方法及装置与流程
本发明一般涉及车辆控制,具体涉及一种基于后悬空气悬架的车高控制方法及装置。
背景技术:
1、随着汽车智能化技术的发展,车辆内用于支撑车身、减震以及保持车轮与地面接触、调节车身高度的主动悬架系统可以在不同道路场景下都能保证车辆具有较好的乘坐舒适性和操纵稳定性,其中,一般的主动悬架系统均包含有空气悬架,空气悬架为一种通过给空气弹簧系统充气放气,来升降底盘高度的装置,进而控制车身的高度。
2、现有的基于空气弹簧系统的车身高度调整大多是利用四个空气弹簧控制车身高度,但现实中存在某些车辆前悬无法布置空气悬架或者是由于成本限制,车辆无法使用整套空气悬架系统,致使放弃在车辆前悬布置空气悬架等情况,面对这些问题只能尝试采取仅在车辆后悬使用空气悬架的方式,所以亟需一种基于后悬空气悬架的车高控制方法。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,期望提供一种基于后悬空气悬架的车高控制方法及装置。
2、第一方面,本技术提供一种基于后悬空气悬架的车高控制方法,包括:
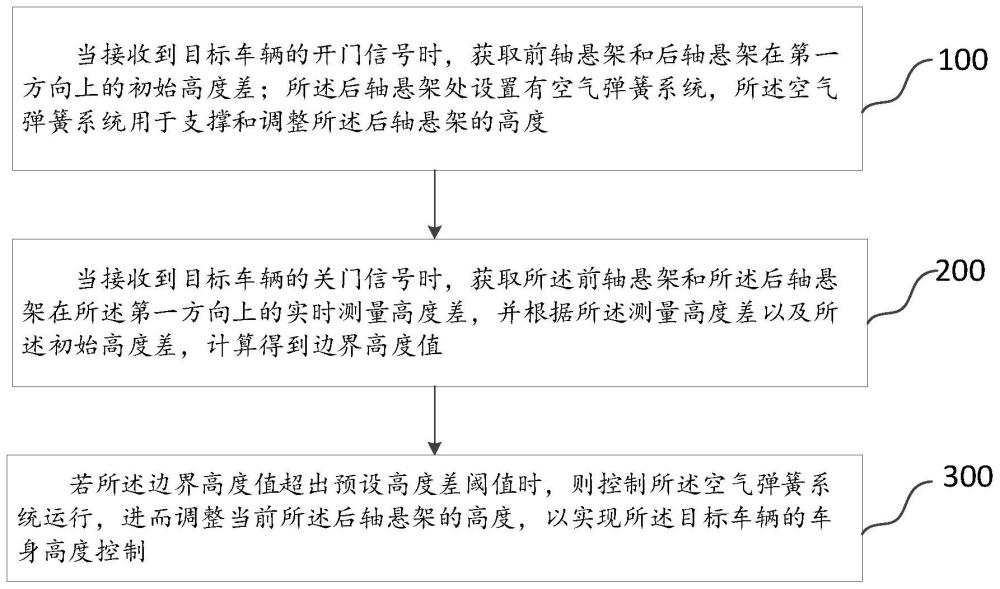
3、当接收到目标车辆的开门信号时,获取前轴悬架和后轴悬架在第一方向上的初始高度差;所述后轴悬架处设置有空气弹簧系统,所述空气弹簧系统用于支撑和调整所述后轴悬架的高度;
4、当接收到目标车辆的关门信号时,获取所述前轴悬架和所述后轴悬架在所述第一方向上的实时测量高度差,并根据所述测量高度差以及所述初始高度差,计算得到边界高度值;
5、若所述边界高度值超出预设高度差阈值时,则控制所述空气弹簧系统运行,进而调整当前所述后轴悬架的高度,以实现所述目标车辆的车身高度控制。
6、根据本技术实施例提供的技术方案,所述获取前轴悬架和后轴悬架在第一方向上的初始高度差,具体包括:
7、获取所述目标车辆的车辆信息;所述车辆信息至少包括初始姿态角以及前后车轮的车轮轴距;
8、根据所述初始姿态角和所述车轮轴距,计算得到所述初始高度差。
9、根据本技术实施例提供的技术方案,所述前轴悬架和后轴悬架均包括有一左侧悬架和一右侧悬架,且所述空气弹簧系统包括分别对应于后轴左侧悬架和后轴右侧悬架的两个空气弹簧;
10、所述获取所述前轴悬架和所述后轴悬架在所述第一方向上的实时测量高度差,并根据所述测量高度差以及所述初始高度差,计算得到边界高度值,具体包括:
11、分别获取所述前轴悬架和所述后轴悬架中位于同一侧的两悬架在所述第一方向上的实时所述测量高度差;
12、根据两个所述测量高度差以及所述初始高度值,分别计算得到对应于所述后轴左侧悬架和所述后轴右侧悬架的两个所述边界高度值。
13、根据本技术实施例提供的技术方案,所述若所述边界高度值超出预设高度差阈值时,则控制所述空气弹簧系统运行,具体包括:
14、任意一个所述边界高度值超出所述预设高度差阈值时,则获取与该所述边界高度值对应的所述后轴悬架位于同侧的所述前轴悬架的实时前轴高度值;
15、根据所述前轴高度值以及所述初始高度差计算得到目标调平高度值;
16、根据所述目标调平高度值,控制与该所述边界高度值对应的所述后轴悬架处的所述空气弹簧运行。
17、根据本技术实施例提供的技术方案,所述若所述边界高度值超出预设高度差阈值时,则控制所述空气弹簧系统运行,具体包括:
18、若两个所述边界高度值均超出所述预设高度差阈值时,则获取所述前轴悬架中两侧悬架的实时前轴高度值;
19、根据该两侧悬架对应的实时前轴高度值以及所述初始高度差,分别计算得到后轴左悬架调平高度值和后轴右悬架调平高度值;
20、根据所述后轴左悬架调平高度值和所述后轴右悬架调平高度值,分别控制所述后轴左侧悬架和后轴右侧悬架处的两个所述空气弹簧运行。
21、根据本技术实施例提供的技术方案,所述控制与该所述边界高度值对应的所述后轴悬架处的所述空气弹簧运行或者所述分别控制所述后轴左侧悬架和后轴右侧悬架处的两个所述空气弹簧运行之前,还包括:
22、获取当前所述目标车辆的车速和加速度;
23、若所述车速大于第一预设车速阈值,且所述加速度小于第一预设加速度阈值,则控制指定空气弹簧运行,所述指定空气弹簧为任意一个所述边界高度值超出所述预设高度差阈值时,与该所述边界高度值对应的所述后轴悬架处的所述空气弹簧,或者为所述后轴左侧悬架和后轴右侧悬架处的两个所述空气弹簧。
24、根据本技术实施例提供的技术方案,所述空气弹簧系统还包括用于控制两个所述空气弹簧的控制回路;所述控制回路至少包括有:储气罐、储气罐控制阀、至少两个空气弹簧控制阀和排气阀;
25、所述控制指定空气弹簧运行,具体包括:
26、向所述储气罐控制阀、所述指定空气弹簧对应的空气弹簧控制阀以及所述排气阀发送控制指令,控制所述储气罐向所述指定空气弹簧充气或者通过所述排气阀对所述指定空气弹簧排气;所述控制指令至少包括:开启或者关闭;
27、获取与所述指定空气弹簧对应的所述后轴悬架中的一个悬架或者所述后轴左侧悬架和所述后轴右侧悬架两个悬架的实时后轴高度值,当该所述后轴高度值到达对应的调平高度值时,控制所述储气罐停止向所述指定空气弹簧供气或者停止对所述指定空气弹簧进行排气。
28、根据本技术实施例提供的技术方案,所述控制回路还包括有压缩机;
29、该所述方法还包括:
30、获取所述储气罐内的气体含量;
31、若所述气体含量低于预设气量阈值时,控制所述压缩机向所述储气罐充气。
32、根据本技术实施例提供的技术方案,所述当该所述后轴高度值到达对应的调平高度值之后,还包括:
33、获取与所述指定空气弹簧对应的所述后轴悬架中的一个悬架或者所述后轴左侧悬架和所述后轴右侧悬架两个悬架到达相应所述调平高度值的调节时长与所述指定空气弹簧内的实时压力信号;
34、若所述调节时长大于预设时间阈值,且所述压力信号检测异常时,则确认为所述空气弹簧系统存在故障,发送故障报警信号并禁用该所述空气弹簧系统。
35、第二方面,本技术提供一种基于后悬空气悬架的车高控制装置,包括:
36、初始高度获取模块,所述高度检测模块用于当接收到目标车辆的开门信号时,获取前轴悬架和后轴悬架在第一方向上的初始高度差;所述后轴悬架处设置有空气弹簧系统,所述空气弹簧系统用于支撑和调整所述后轴悬架的高度;
37、高度处理模块,所述高度检测模块用于当接收到目标车辆的关门信号时,获取所述前轴悬架和所述后轴悬架在所述第一方向上的实时测量高度差,并根据所述测量高度差以及所述初始高度差,计算得到边界高度值;
38、判断模块,所述判断模块用于若所述边界高度值超出预设高度差阈值时,则控制所述空气弹簧系统运行,进而调整当前所述后轴悬架的高度,以实现所述目标车辆的车身高度控制。
39、综上所述,本技术方案具体地公开了基于后悬空气悬架的车高控制方法及装置。其中,所述车高控制方法包括:当接收到目标车辆的开门信号时,获取前轴悬架和后轴悬架在第一方向上的初始高度差;所述后轴悬架处设置有空气弹簧系统,所述空气弹簧系统用于支撑和调整所述后轴悬架的高度;当接收到目标车辆的关门信号时,获取所述前轴悬架和所述后轴悬架在所述第一方向上的实时测量高度差,并根据所述测量高度差以及所述初始高度差,计算得到边界高度值;若所述边界高度值超出预设高度差阈值时,则控制所述空气弹簧系统运行,进而调整当前所述后轴悬架的高度,以实现所述目标车辆的车身高度控制。
40、现有的基于空气弹簧系统的车身高度调整大多是利用四个空气弹簧控制车身高度,但现实中存在一些车辆因某些情况导致前悬无法布置使用空气悬架的情况,本技术提供一种针对仅在车辆后悬使用空气悬架时的车高控制方法,该方法以开门信号和关门信号为车身高度调整的先行进入条件,再基于实时测量高度差以及初始高度差进行计算与判断该目标车辆是否需要进行车身高度调整,并在判定为需要进行车身高度调整的情况下,控制后轴悬架处的空气弹簧系统运行,该方法实时、有效地保证了车身姿态的平稳。
- 还没有人留言评论。精彩留言会获得点赞!