换轨机构及高空走行式无人搬运车的搬运系统的制作方法
本技术涉及一种换轨机构及轨道系统,特别是一种适用于高空走行式无人搬运车的换轨机构及轨道系统。
背景技术:
1、现有常见的应用于高空走行式无人搬运车的搬运系统中包含有主轨道、换轨机构、第一支线轨道及第二支线轨道。换轨机构主要是用来使主轨道与第一支线轨道或第二支线轨道连接。常见的换轨机构,大多仅包含单一个衔接轨道,衔接轨道连接旋转机构,且衔接轨道的外型,依据主轨道、第一支线轨道及第二支线轨道设计,而衔接轨道的外型并非直线。
2、当换轨机构被控制而作动时,衔接轨道将会旋转预定角度,而衔接轨道的一端将与主轨道连接,衔接轨道的另一端则会依据旋转角度、旋转方向的不同,而与第一支线轨道或第二支线轨道连接。
3、如上所述,由于衔接轨道的外型并非直线,因此,无人搬运车通过衔接轨道时,必需严重的降速,否则无人搬运车可能会有摇晃、翻车、承载物品掉落等问题。
技术实现思路
1、本技术公开一种换轨机构及高空走行式无人搬运车的搬运系统,主要用以改善高空走行式无人搬运车,通过换轨机构的衔接轨道,必需严重降速,以避免相关危险发生,进而导致无人搬运车的整体运输效能降低的问题。
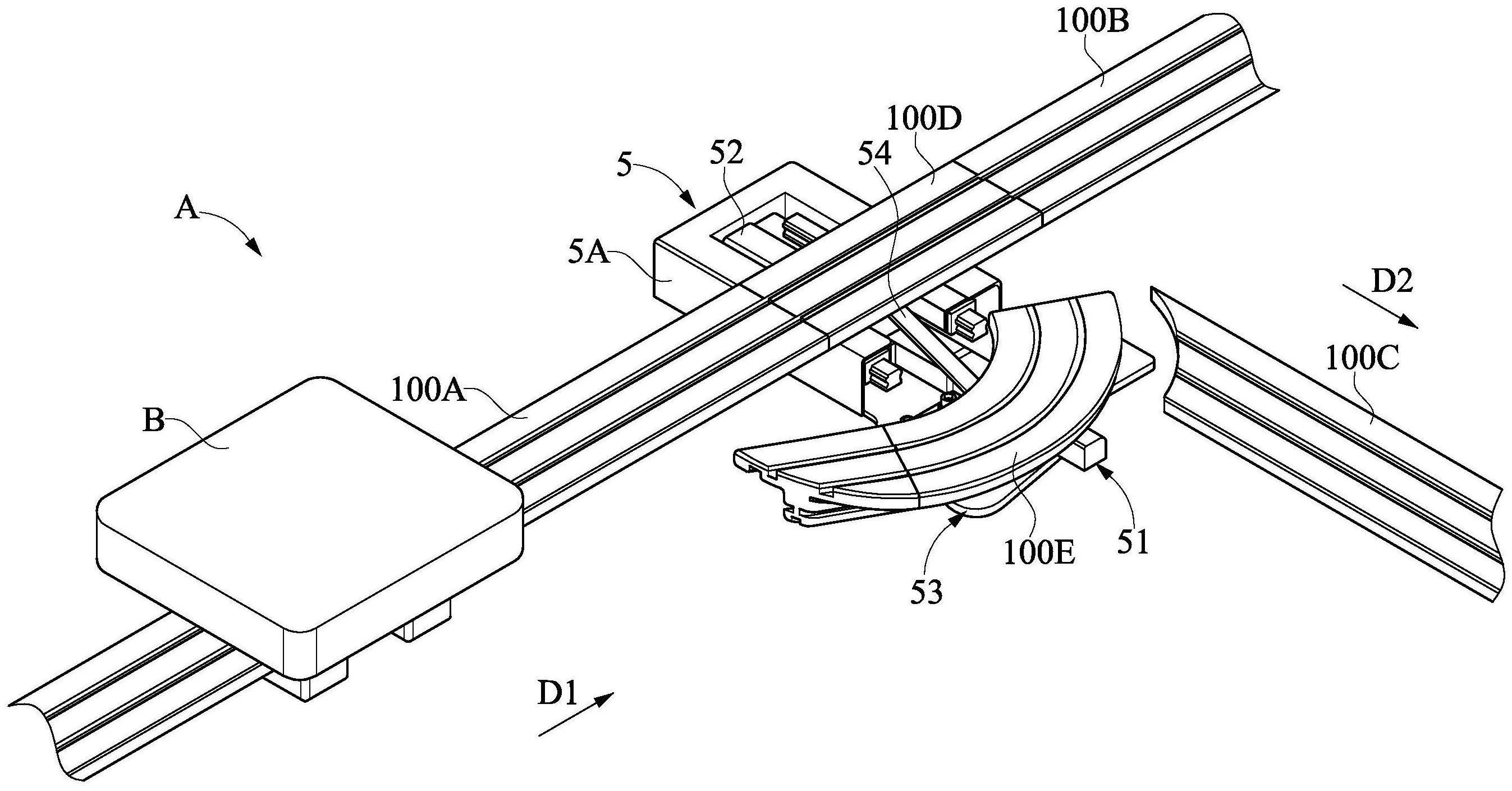
2、本技术的其中一个实施例公开一种换轨机构,其适用于一高空走行式无人搬运车的搬运系统中,高空走行式无人搬运车的搬运系统包含主轨道、第一支线轨道及第二支线轨道,换轨机构包含:本体;驱动模块,其设置于本体;滑动模块,其用以连接一第一连接轨,滑动模块能被驱动模块控制,以使第一连接轨相对于本体移动;枢转模块,其可旋转地设置于本体,且枢转模块与驱动模块相连接,枢转模块用以与第二连接轨连接;其中,驱动模块能驱动滑动模块及枢转模块同时作动,以使第一连接轨及第二连接轨同时相对于本体活动,而使主轨道能据以通过第一连接轨与第一支线轨道连接,或者,使主轨道能据以通过第二连接轨与第二支线轨道连接。
3、可选地,换轨机构还包含第一连接轨及第二连接轨;其中,彼此相连接的主轨道、第一连接轨及第一支线轨道,用以提供无人搬运车沿第一行进方向移动,而彼此相连接的主轨道、第二连接轨及第二支线轨道,则用以提供无人搬运车由第一行进方向转向至第二行进方向移动;第一行进方向不平行于第二行进方向。
4、可选地,换轨机构还包含连动组件,其连接滑动模块及枢转模块;当驱动模块驱动滑动模块,而使第一连接轨相对于本体活动时,滑动模块将通过连动组件,带动枢转模块作动,以使第二连接轨相对于本体旋转。
5、可选地,驱动模块包含控制器及驱动组件,滑动模块包含滑轨及滑块,控制器电性连接驱动组件,驱动组件连接滑块,控制器能控制驱动组件作动,以使滑块于滑轨上移动;枢转模块包含枢转件,枢转件可旋转地枢接于本体;连动组件的一端与滑块连接,连动组件的另一端与枢转件相连接;滑块被驱动而相对于滑轨沿滑动方向移动时,连动组件的一端将随着滑块移动,而连动组件的另一端将带动枢转件,以使枢转件及与其连接的第二连接轨相对于本体旋转。
6、可选地,本体包含第一安装区及至少两个第二安装区,驱动模块安装于第一安装区,两个第二安装区位于第一安装区的两侧,各个第二安装区用以提供枢转模块安装;枢转模块还包含枢转主体,枢转主体用以安装于其中一个第二安装区,枢转主体与枢转件相互枢接,而枢转件能通过枢转主体相对于本体旋转。
7、可选地,换轨机构还包含辅助模块,辅助模块包含两个辅助滑轨、两个辅助滑块及辅助连接件,两个辅助滑轨设置本体,两个辅助滑轨位于滑轨的两侧,各个辅助滑块能依循相对应的辅助滑轨沿滑动方向移动;辅助连接件连接滑块、两个辅助滑块、连动组件及第一连接轨。
8、本技术的其中一个实施例公开一种高空走行式无人搬运车的搬运系统,其用以导引无人搬运车于高空中行走,高空走行式无人搬运车的搬运系统包含:主轨道;第一支线轨道,其一端邻近主轨道设置;第二支线轨道,其一端邻近主轨道设置;换轨机构,其包含:本体;第一连接轨;第二连接轨;驱动模块,其设置于本体;滑动模块,其连接第一连接轨,滑动模块能被驱动模块控制,以使第一连接轨相对于本体移动;枢转模块,其可旋转地设置于本体,且枢转模块与驱动模块相连接,枢转模块与第二连接轨连接;其中,驱动模块能驱动滑动模块及枢转模块同时作动,以使第一连接轨及第二连接轨同时相对于本体活动,而使主轨道能据以通过第一连接轨与第一支线轨道连接,或者,使主轨道能据以通过第二连接轨与第二支线轨道连接。
9、可选地,彼此相连接的主轨道、第一连接轨及第一支线轨道,用以提供无人搬运车沿第一行进方向移动,而彼此相连接的主轨道、第二连接轨及第二支线轨道,则用以提供无人搬运车由第一行进方向转向至第二行进方向移动;其中,第一行进方向不平行于第二行进方向。
10、可选地,换轨机构还包含连动组件,其连接滑动模块及枢转模块;当驱动模块驱动滑动模块,而使第一连接轨相对于本体活动时,滑动模块将通过连动组件,带动枢转模块作动,以使第二连接轨相对于本体旋转。
11、可选地,驱动模块包含控制器及驱动组件,滑动模块包含滑轨及滑块,控制器电性连接驱动组件,驱动组件连接滑块,控制器能控制驱动组件作动,以使滑块于滑轨上移动;枢转模块包含枢转件,枢转件可旋转地枢接于本体;连动组件的一端与滑块连接,连动组件的另一端与枢转件相连接;滑块被驱动而相对于滑轨沿滑动方向移动时,连动组件的一端将随着滑块移动,而连动组件的另一端将带动枢转件,以使枢转件及与其连接的第二连接轨相对于本体旋转。
12、可选地,本体包含第一安装区及至少两个第二安装区,驱动模块安装于第一安装区,两个第二安装区位于第一安装区的两侧,各个第二安装区用以提供枢转模块安装;枢转模块还包含枢转主体,枢转主体用以安装于其中一个第二安装区,枢转主体与枢转件相互枢接,而枢转件能通过枢转主体相对于本体旋转。
13、可选地,换轨机构还包含辅助模块,辅助模块包含两个辅助滑轨、两个辅助滑块及辅助连接件,两个辅助滑轨设置本体,两个辅助滑轨位于滑轨的两侧,各个辅助滑块能依循相对应的辅助滑轨沿滑动方向移动;辅助连接件连接滑块、两个辅助滑块、连动组件及第一连接轨。
14、可选地,主轨道、第一支线轨道及第二支线轨道都分别包含滑动结构及支撑结构,滑动结构包含第一宽侧面、第二宽侧面、第一窄侧面及第二窄侧面,第一宽侧面及第二宽侧面彼此相反地设置,第一窄侧面及第二窄侧面彼此相反地设置;支撑结构的一端固定设置于第二宽侧面,支撑结构与滑动结构共同形成第一容置缺口及第二容置缺口,而支撑结构位于第一容置缺口及第二容置缺口之间;高空走行式无人搬运车的搬运系统还包含无人搬运车,无人搬运车包含主动轮及辅助导轮模块,主动轮能被驱动,而于第一宽侧面移动,辅助导轮模块包含架体组件、两个第一导轮、两个第二导轮、第一侧导轮及第二侧导轮,架体组件设置于本体的一侧,两个第一导轮并排地设置,且各个第一导轮用以于第一宽侧面移动,两个第二导轮并排地设置,各个第二导轮用以于第二宽侧面移动;其中一个第二导轮位于第一容置缺口,且另一个第二导轮位于第二容置缺口;第一侧导轮设置于架体组件,第一侧导轮用以于第一窄侧面移动,第二侧导轮设置于架体组件,第二侧导轮用以于第二窄侧面移动。
15、可选地,高空走行式无人搬运车的搬运系统还包含至少一个存放架,存放架邻近主轨道的一侧设置,无人搬运车还包含移载模块及固持机构,固持机构用以固持设置于无人搬运车上的待载物,移载模块用以移载待载物,以将无人搬运车上的待载物移载至存放架上,或者,将存放架上的待载物移载至无人搬运车上。
16、综上所述,本技术的换轨机构及高空走行式无人搬运车的搬运系统,通过第一连接轨、第二连接轨、驱动模块、滑动模块及枢转模块等设计,让无人搬运车沿着第一连接轨或第二连接轨移动时,可以不用严重降速,藉此,可以提升无人搬运车的整体搬运效能。
17、为能更进一步了解本技术的特征及技术内容,请参阅以下有关本技术的详细说明与附图,但是此等说明与附图仅用来说明本技术,而非对本技术的保护范围作任何的限制。
- 还没有人留言评论。精彩留言会获得点赞!