一种基于可见光波识别的轨道交通列车测速及定位系统的制作方法
1.本实用新型属于轨道交通列车控制技术领域,具体涉及一种基于可见光波识别的轨道交通列车测速及定位系统。
背景技术:
2.在轨道交通列车控制技术领域,精确测量轨道交通车辆的速度与对车辆的绝对位置进行定位,对于轨道交通具有重要的意义。
3.目前轨道交通中的测速定位方式主要包括基于轮轴传感器的测速定位、基于卫星导航的测速定位、基于轨旁设备(如信标)的位置确认+雷达测速以及其他组合的测速定位方式。
4.轮轴传感器存在测速轮对空转和滑行的问题;卫星导航系统很难解决隧道、山地等特殊环境条件的限制;信标加雷达速度传感器方式速度较低时,多普勒效应不明显,测速的精度较低,信标也容易受到外界电磁环境干扰。
技术实现要素:
5.为了弥补现有技术的不足,本实用新型提供一种基于可见光波识别的轨道交通列车测速及定位系统,可获得列车的实时速度和绝对位置信息,测试精度高,易于维护且成本低。
6.为了达到上述目的,本实用新型所采用的技术方案为:
7.一种基于可见光波识别的轨道交通列车测速及定位系统,其特征在于:
8.列车底部设置有n个颜色传感器,用于对识别到的颜色编码,并记录识别到颜色的时间点;所述颜色传感器沿钢轨宽度方向布置,相邻两个颜色传感器沿车辆行进方向设定一定距离;
9.不同枕木上分别设置有颜色识别区域和色板;
10.所述颜色识别区域包括n个色块,所述每个色块在沿车辆行进方向的两个边界线均重合,在沿钢轨宽度方向上与颜色传感器位置一一相对应,颜色传感器可顺序识别到每个色块;
11.所述色板包括n个色卡,所述色卡沿钢轨宽度方向及车辆行进方向均与颜色传感器位置相对应,保证每个色卡被颜色传感器同时识别到;
12.数据处理模块中预先存储有相邻两个颜色传感器的距离,并将采集到的相邻两个色块的时间点作差,可获得列车的实时速度;
13.数据处理模块中预先存储有位置信息库,位置信息库包括多个位置编码序列,每个位置编码序列对应一个列车位于色板处的绝对位置信息;数据处理模块采集色板上每个色卡的颜色所对应的编码,并将所有颜色编码按照位置信息库中设定的顺序进行排序,形成所述色板的编码序列,随后在预先存储的位置信息库中检索相匹配的位置编码序列,可获得列车的实时位置信息。
14.进一步,所述色块和色卡采用光学色板或光学色漆。
15.进一步,相邻两个颜色传感器的距离总和∑(d1+d2+
…
+d
n-2
+d
n-1
)大于等于l2且小于等于l1+l2,l1为枕木宽度,l2为枕木内侧距离。
16.进一步,数据处理模块依据获得的多个列车实时速度,可输出列车在两个枕木之间的预测速度,所述预测速度与列车实时运行时刻的乘积即为列车相对色板的相对位移;将相对位移与色板处的实时位置相加,即可获取两个色板之间的列车实时位置信息。
17.本实用新型的有益效果:
18.1)本实用新型通过在不同枕木上设置颜色识别区域和色板,利用可见光波颜色传感器对识别到的颜色进行编码以及记录识别到颜色的时间点,可获得列车的实时速度和实时位置;
19.2)本实用新型中采用的可见光波颜色传感器响应速度快,终端设备采集响应速度可达200μs;可见光波颜色传感器终端可直接编码,直接输出2进制或16进制编码,减少传输和解析处理时间,同时也降低了转换误码率;可见光波颜色传感器工作不受地形条件影响,不受轨旁空间限制;
20.3)本实用新型除车载配置可见光波颜色传感器外,轨旁仅配置少量光学色板或刷光学色漆,地面没有电子元器件,整个系统免维护且投资成本低;
21.4)本实用新型为纯光系统,不受外界电磁场干扰,测试结果可靠、精度高。
附图说明
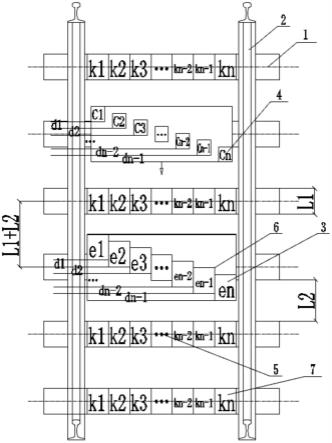
22.图1为本实用新型整体示意图;
23.图2为本实用新型正视图;
24.图中,1-枕木,2-钢轨,3-色卡,4-颜色传感器,5-颜色识别区域,6-色板,7-色块。
具体实施方式
25.下面结合具体实施方式对本实用新型进行详细的说明。
26.如图1所示,列车底部设置有n个颜色传感器4,用于对识别到的颜色编码,并记录识别到颜色的时间点;颜色传感器c1…cn
沿钢轨2宽度方向布置,相邻两个颜色传感器4沿车辆行进方向设定一定距离,依次为d1,d2…dn-2
,d
n-1
,其取值可以相等,也可以不相等;∑(d1+d2+
…
+d
n-2
+d
n-1
)宜大于等于l2且小于等于l1+l2,l1为枕木宽度,l2为枕木内侧距离;
27.不同枕木1上分别设置有颜色识别区域5和色板6;
28.颜色识别区域5包括n个色块7,色块k1,k2,k3…kn-2
,k
n-1
,kn在沿车辆行进方向的两个边界线均重合,在沿钢轨2宽度方向上与颜色传感器c1…cn
位置相对应;车辆行进过程中,颜色传感器c1…cn
可顺序识别到色块k1,k2,k3…kn-2
,k
n-1
,kn;色块7可采用光学色板或刷光学色漆完成;
29.如图2所示,色板6包括n个色卡3,色卡3沿钢轨2宽度方向及车辆行进方向均与颜色传感器4位置相对应,相邻两个色卡3沿车辆行进方向的距离依次为d1,d2…dn-2
,d
n-1
,保证色卡e1~en被颜色传感器c1…cn
分别同时识别到;色卡3可采用光学色板或刷光学色漆完成;
30.数据处理模块中预先存储有相邻两个颜色传感器4的距离,并将采集到的相邻两
个色块7的时间点作差,可获得列车的实时速度;
31.数据处理模块中预先存储有位置信息库,位置信息库包括多个位置编码序列,每个位置编码序列对应一个列车绝对位置信息;数据处理模块采集色板6上每个色卡3的颜色编码,并将所有颜色编码按照设定的顺序进行排序,形成色板6的编码序列,随后在预先存储的位置信息库中检索相匹配的位置编码序列,可获得列车的实时位置信息。
32.本实用新型工作原理如下:
33.1)实时速度的获取
34.列车行进在钢轨2上,当行至设置有颜色识别区域5的枕木1处时,首先由颜色传感器c1识别到色块k1,并记录识别到色块k1的时间点t1;车辆继续行进,颜色传感器c2…cn
依次分别识别到色块k2,k3…kn-2
,k
n-1
,kn,并记录识别到相应色块的时间点t2…
t
n-1
,tn;数据处理模块4中预先存储有相邻两个颜色传感器4的距离d1,d2…dn-2
,d
n-1
,并将采集到的相邻两个色块7的时间点作差,得到车辆行驶距离d1,d2…dn-2
,d
n-1
所需要的时间t
2-t1,t
3-t2,t
4-t3,
…
,t
n-t
n-1
,通过距离时间关系即可获得列车在d1,d2…dn-2
,d
n-1
各距离段内的平均速度,因d1,d2…dn-2
,d
n-1
设置较小,可视为列车的实时速度;
35.2)色板处实时位置的获取
36.列车行进在钢轨2上,当行至设置有色板6的枕木1处时,色卡e1~en被颜色传感器c1…cn
分别同时识别到;数据处理模块中预先存储有位置信息库,位置信息库包括多个位置编码序列,每个位置编码序列对应一个列车位于色板6处的绝对位置信息;数据处理模块采集色板6上每个色卡3的颜色编码,形成列车所处位置处的色板6的编码序列,并在预先存储的位置信息库中检索相匹配的位置编码序列,可获得列车的实时位置信息。
37.3)两个色板之间实时位置的确定
38.数据处理模块依据颜色传感器获得的多个列车实时速度,也可输出列车在前方任意两个枕木1之间的预测速度;通过列车的实时速度、预测速度与列车实时运行时刻的积分运算即可得到列车相对色板6的相对位移;将相对位移与色板6处的实时位置相加,即可获取两个色板6之间的列车实时位置信息。
39.在本实用新型的描述中,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
40.本实用新型的内容不限于实施例所列举,本领域普通技术人员通过阅读本实用新型说明书而对本实用新型技术方案采取的任何等效的变换,均为本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1