一种小节段匹配运输液压台车的制作方法
本技术涉及桥梁施工,尤其是涉及一种小节段匹配运输液压台车。
背景技术:
1、随着桥梁装配式施工技术的发展,目前铁路、公路等预应力箱梁制造、驮运、架设等技术也比较成熟,配套形成了提梁机、架桥机、驮运台车等一系列的施工设备。
2、相关技术中,装配式桥梁的桥墩架设完成后,需要起吊、驮运、架设相对应的钢箱梁等;其中钢箱梁大都是通过小节段的钢梁进行匹配组装焊接固定,在焊接之前,小节段钢梁需要通过驮运台车完成转运拼接存放工作,运输小阶段钢梁的作业方式是将待驮运物起吊放置在驮运台车上,通过驱使驮运台车行走于桥墩的墩帽预先铺设的轨道上,从而通过驮运台车将不同尺寸、重量的墩顶钢梁驮运到对应的架设位置以进行下一步的匹配组装焊接工作;且拱桥式的桥梁还可通过驮运台车驮运拱梁、衔梁等。
3、但施工人员在利用驮运台车驮运多种类型的小节段钢梁箱梁时仍存在一个问题:因桥梁需在山川、平原、河流等不同地形进行建设,一条线路上的桥墩的外形尺寸并不相同,甚至相差甚大;且不同节段的钢箱梁的尺寸、长度不尽相同,而单一的驮运台车能够适用驮运的待驮运物的长度范围较小,因而存在有驮运台车的适用性较小的缺陷。
技术实现思路
1、为了提高驮运台车的驮运长度范围,提高驮运台车的适用性,本技术提供一种小节段匹配运输液压台车。
2、本技术提供的一种小节段匹配运输液压台车,采用如下的技术方案:
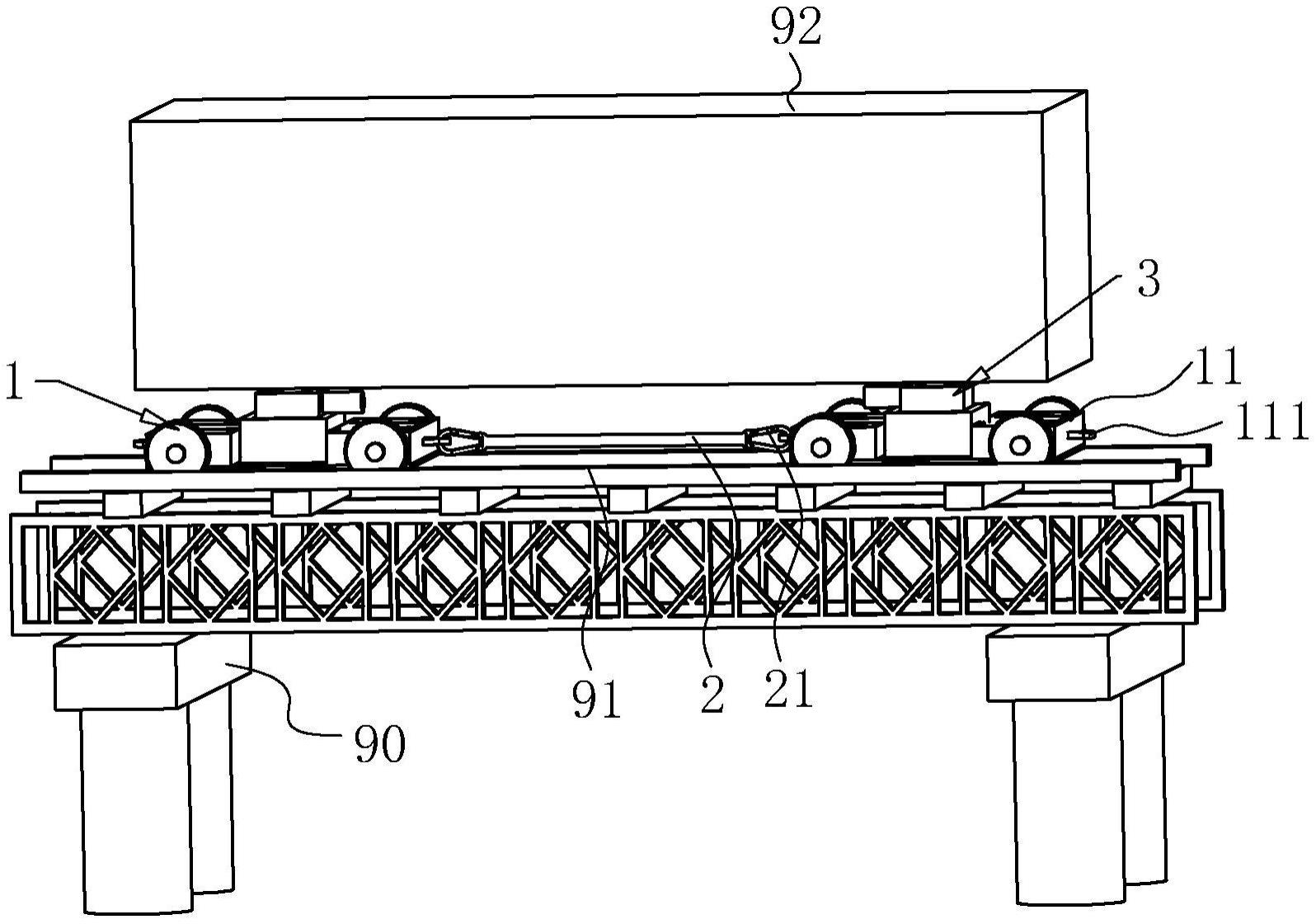
3、一种小节段匹配运输液压台车,包括多台驮运台车和牵引绳,多台所述驮运台车沿墩帽上的轨道间隔设置,相邻的两台所述驮运台车之间可拆卸连接有牵引绳,所述驮运台车包括驮运车架和用于驱使所述驮运车架行进的行进驱动组件,所述驮运车架的顶部设置有顶升支撑件。
4、通过采用上述技术方案,桥梁的桥墩墩帽顶部设置有用于供驮运台车行进的轨道,多台驮运台车沿墩帽顶部的轨道间隔铺设,且相邻的台车之间设置有牵引绳,牵引绳可拆卸设置以便于根据待驮运的钢梁的长度进行调整,牵引绳将位于行进方向前方的驮运台车的动能平稳地传递至后方的驮运台车,有利于驮运台车在轨道上行进时保持平稳;提高驮运台车的驮运效果;施工人员利用驮运台车驮运待驮运物如小节段的钢梁时,先将待驮运物放置在顶升支撑件的顶部,调整顶升支撑件,使得顶升支撑件将待驮运物平稳地放置在驮运台车的顶部,接着驱使驮运台车行进移动以将待驮运物驮运至合适位置;本技术技术方案设置有多台驮运台车,且牵引绳可拆卸连接以根据实际情况连接不同长度的牵引绳,从而提高了驮运台车的驮运长度范围,且提高了驮运台车的适用性。
5、优选的,所述驮运台车设置有两台,所述顶升支撑件包括:三维液压千斤顶。
6、通过采用上述技术方案,两台驮运台车分别位于待驮运物的相对两端的底部将待驮运物驮运至指定位置,且可通过更换不同长度和尺寸的牵引绳以适用于不同长度的钢箱梁等;三维液压千斤顶用于支撑待驮运物,承重能力较强;且三维液压千斤顶可沿x轴、y轴和z轴方向进行位移调整,便于工作人员调整顶升支撑件的承重着力点,且液压三维千斤顶的顶升和回程速度较快,顶升过程较平稳;施工人员利用驮运台车将待驮运物移动至指定位置后,再通过三维液压千斤顶顶升待驮运物,以便于在后续施工过程中吊装和架设待驮运物。
7、优选的,所述牵引绳为弹性牵引绳,所述牵引绳的相对两端设置有挂钩;所述驮运车架的侧边均设置有挂环,所述挂钩挂设在所述挂环。
8、通过采用上述技术方案,弹性牵引绳有利于减少多台驮运台车之间的弹性冲击负荷,减少了驮运台车在牵引邻车移动和被邻车牵引移动行进的过程中产生的震动,提高驮运台车的移动效果。
9、优选的,所述行进驱动组件包括:车轮和用于驱动所述车轮正转和反转的驱动电机,所述驱动电机安装于所述驮运车架;所述驱动电机耦接有用于控制驱动电机正反转的红外遥控电路,所述红外遥控电路包括按钮单元、红外感应单元、信号比较单元、第一开关单元和第二开关单元;
10、所述按钮单元用于检测按钮被按压时输出触控信号至红外感应单元;
11、所述红外感应单元耦接于按钮单元以在接收到所述触控信号时输出红外信号;
12、所述信号比较单元耦接于所述红外感应单元并而设置有阈值信号vref,所述信号比较单元将所述红外信号与阈值信号vref进行比较并输出比较信号,所述比较信号包括第一比较信号和第二比较信号;
13、所述第一开关单元耦接于所述信号比较单元以在接收到所述第一比较信号时输出正转信号至驱动电机,所述驱动电机在接收到所述正转信号时正向转动;所述第二开关单元耦接于所述信号比较单元以在接收到所述第一比较信号时输出反转信号至驱动电机,所述驱动电机在接收到所述反转信号时反向转动。
14、通过采用上述技术方案,驱动电机正反向转动以实现在墩帽上的轨道上来回往复移动,从而便于多次驮运待驮运物,且便于驮运台车移动和调整停留的指定位置,提高了驮运台车的适用性;驱动电机正向转动以从初始的承载待驮运物位置移动至下一步工序的指定位置(即卸载待驮运物的位置),驱动电机反向转动以驱使驮运台车返回初始位置;具体地,当需要驱使驮运台车驮运钢箱梁等施工件时,按压按钮单元,按钮单元输出触控信号至红外感应单元,红外感应单元接收到触控信号时输出红外信号,信号比较单元接收到红外信号时红外信号小于阈值信号vref,信号比较单元输出第一比较信号至第一开关单元和第二开关单元,第一开关单元接收到第一比较信号时输出正转信号至驱动电机,实现驱动电机的正转,第二开关单元接收到第一比较信号时输出反转信号至驱动电机,驱动电机反转;当没有按压按钮单元时,按钮单元丢失触控信号,红外感应单元不输出红外信号,信号比较单元输出第二比较信号,第一开关单元不输出正转信号,第二开关单元不输出反转信号,驮运台车停止移动或停留在云位置;从而便于实现驱使驱动电机在桥梁墩帽的轨道上往复移动的效果。
15、优选的,所述按钮单元包括正转按钮sw1和反转按钮sw2,所述正转按钮sw1与电源电压串联后耦接于红外感应单元以输出正转触控信号,所述反转按钮sw2与电源电压串联后耦接于红外感应单元以输出反转触控信号。
16、通过采用上述技术方案,按压正转按钮sw1,实现驱动电机接收进行正转的触控信号;按压反转按钮sw2,实现驱动电机接收进行反转的触控信号。
17、优选的,所述红外感应单元包括第一红外发光二极管led1、第二红外发光二极管led2、第一光电开关管q1和第二光电开关管q2,所述第一光电开关管q1耦合于第一红外发光二极管led1以接收第一红外发光二极管led1发出的红外信号,所述第二光电开关管q2耦合于第二红外发光二极管led2以接收第二红外发光二极管led2发出的红外信号,所述第一红外发光二极管led1与正转按钮sw1串联,所述第二红外发光二极管led2与反转按钮sw2串联,所述第一光电开关管q1的集电极与电源电压串联后耦接于信号比较单元,所述第一光电开关管q1的发射极接地;所述第二光电开关管q2与电源电压串联后耦接于信号比较单元,所述第二光电开关管q2的发射极接地。
18、通过采用上述技术方案,按压正转按钮sw1时,第一红外发光二极管led1得电发出红外信号,第一光电开关管q1接收到第一红外发光二极管led1发出的红外信号时,第一光电开关管q1导通,第一光电开关管q1的集电极输出红外信号至信号比较单元。
19、优选的,所述信号比较单元包括第一比较器n1和第二比较器n2,所述第一比较器n1的第一信号输入端耦接于第一光电开关管q1的集电极,所述第一比较器n1的第二信号输入端接入阈值信号vref,所述第一比较器n1的信号输出端耦接于第一开关单元;所述第二比较器n2的第一信号输入端耦接于第二光电开关管q2的集电极,所述第二比较器n2的第二信号输入端接入阈值信号vref,所述第二比较器n2的信号输出端耦接于第二开关单元。
20、通过采用上述技术方案,第一比较器n1的第一信号输入端为正相电压输入端,第一比较器n1的第二信号输入端为反相电压输入端;第一比较器n1的第一信号输入端接收到的红外信号与第二信号输入端设置的阈值信号vref进行比较,并在第一比较器n1的信号输出端输出红外信号与阈值信号vref的比较结果,从而第一比较器n1实现红外信号的大小比较的功能。
21、优选的,所述第一开关单元包括第一三极管q3和第一断电延时继电器kt1,所述第一三极管q3的基极耦接于所述第一比较器n1的信号输出端,第一三极管q3的发射极与第一断电延时继电器kt1的线圈串联后耦接于电源电压,所述第一三极管q3的集电极接地;所述第一断电延时继电器kt1包括延时常开触点kt1-1,所述延时常开触点kt1-1耦接于所述驱动电机的正转回路。
22、通过采用上述技术方案,第一比较信号为低电平信号,第二比较信号为高电平信号,第一三极管q3为pnp型三极管;第一断电延时继电器kt1设置有断电预设时间,即可通过第一断电延时继电器kt1设置驱动电机正转驱使驮运台车移动的时长;如持续移动25分钟或30分钟等,便于控制驮运台车的驮运移动距离;第一三极管q3的基极接收到低电平信号(即第一比较信号)后导通,驱动电机的正转回路导通,驱动电机正转启动运作以驱使驮运台车移动行进;第一三极管q3的基极接收到高电平信号(即第二比较信号)后截止,驱动电机的正转供电回路截止,驱动电机关停以使得驮运台车停留在轨道上的指定位置。
23、优选的,所述第二开关单元包括第二三极管q4和第二断电延时继电器kt2,所述第二三极管q4的基极耦接于所述第二比较器n2的信号输出端,所述第二三极管q4的发射极与第二断电延时继电器kt2的线圈串联后耦接于电源电压,所述第二三极管q4的集电极接地,所述第二断电延时继电器kt2包括延时常开触点开关kt2-1,所述延时常开触点开关kt2-1耦接于驱动电机的反转回路。
24、通过采用上述技术方案,第二三极管q4为pnp型三极管,第二断电延时继电器kt2设置有断电预设时间,即可通过第二断电延时继电器kt2设置驱动电机反转驱使驮运台车移动的时长;如持续移动25分钟或30分钟等,便于控制驮运台车的返回移动距离;第二三极管q4的基极接收到低电平信号(即第一比较信号)后导通,驱动电机的反转回路导通,驱动电机往反方向启动运作以驱使驮运台车移动返回至初始装载待驮运物的位置;第二三极管q4的基极接收到高电平信号(即第二比较信号)后截止,驱动电机的反转供电回路截止,驱动电机关停以使得驮运台车停留在装载待驮运物的指定位置。
25、综上所述,本技术包括以下至少一种有益技术效果:
26、1.施工人员利用驮运台车驮运待驮运物如钢梁时,先将待驮运物放置在顶升支撑件的顶部,调整顶升支撑件,使得顶升支撑件将待驮运物平稳地放置在驮运台车的顶部,接着驱使驮运台车行进移动以将待驮运物驮运至合适位置;本技术技术方案设置有多台驮运台车,且牵引绳可拆卸连接以根据实际情况连接不同长度的牵引绳,从而提高了驮运台车的驮运长度范围,且提高了驮运台车的适用性;
27、2.两台驮运台车分别位于待驮运物的相对两端的底部将待驮运物驮运至指定位置,且可通过更换不同长度和尺寸的牵引绳以适用于不同长度的小节段钢箱梁等;三维液压千斤顶用于支撑待驮运物,承重能力较强;且三维液压千斤顶可沿x轴、y轴和z轴方向进行位移调整,便于工作人员调整顶升支撑件的承重着力点,且液压三维千斤顶的顶升和回程速度较快,顶升过程较平稳;施工人员利用驮运台车将待驮运物移动至指定位置后,再通过三维液压千斤顶顶升待驮运物,以便于在后续施工过程中吊装和架设待驮运物;
28、3.驱动电机正反向转动以实现在墩帽上的轨道上来回往复移动,从而便于多次驮运待驮运物,且便于驮运台车移动和调整停留的指定位置,提高了驮运台车的适用性;驱动电机正向转动以从初始的承载待驮运物位置移动至下一步工序的指定位置(即卸载待驮运物的位置),驱动电机反向转动以驱使驮运台车返回初始位置;具体地,当需要驱使驮运台车驮运小节段的钢箱梁等施工件时,按压按钮单元,按钮单元输出触控信号至红外感应单元,红外感应单元接收到触控信号时输出红外信号,信号比较单元接收到红外信号时红外信号小于阈值信号vref,信号比较单元输出第一比较信号至第一开关单元和第二开关单元,第一开关单元接收到第一比较信号时输出正转信号至驱动电机,实现驱动电机的正转,第二开关单元接收到第一比较信号时输出反转信号至驱动电机,驱动电机反转。
- 还没有人留言评论。精彩留言会获得点赞!