一种基于地面运控系统的列车车轮控制方法和系统与流程
本发明属于列车轨道运行领域,特别涉及一种基于地面运控系统的列车车轮控制方法和系统。
背景技术:
1、超导磁浮列车在低于某个速度运行时,超导磁体产生的浮力不足以支撑列车,因此列车需设置起降轮(支撑轮)和导向轮,列车低速运行或者静止时,由实体轮实现对列车的支撑。当列车运行速度高于某个值时(超导磁浮的磁浮力与列车速度相关联),超导磁体产生的浮力能够可靠支撑列车,这是需收起起降轮和导向轮,由磁力实现列车的悬浮运行。
2、然而由于支撑轮和导向轮的动作是需要时间的,因此对其的控制策略不能简单的认为当v车>v浮时,立刻进行收轮操作,当v车v浮进行放轮操作。因为列车是运动体,速度实时发生变化,在某一个时刻v车>v浮,下一时刻有可能v车<v浮,这样会造成支撑轮和导向轮非意图动作。因此需要增加另外的判断条件
3、因此,需要一种基于地面运控系统的列车车轮控制方法和系统,来精准的控制起降轮和导向轮的收轮和落轮。
技术实现思路
1、针对上述问题,本发明提出一种基于地面运控系统的列车车轮控制方法,其中,所述方法包括:
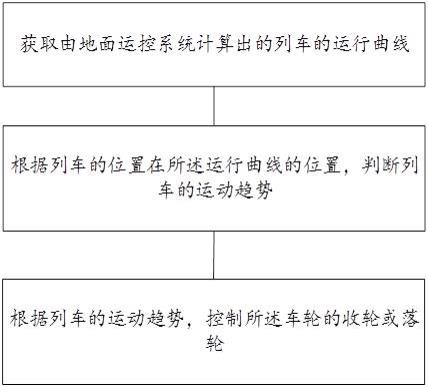
2、获取由地面运控系统计算出的列车的运行曲线;
3、根据列车的位置在所述运行曲线的位置,判断列车的运动趋势;
4、根据列车的运动趋势,控制所述车轮的收轮或落轮,其中,所述车轮包括支撑轮和导向轮。
5、在一些实施例中,列车的运动趋势包括速度上升阶段、匀速运行阶段以及速度下降阶段。
6、在一些实施例中,所述支撑轮和导向轮的收轮保持同步。
7、在一些实施例中,控制所述车轮的收轮操作,包括:
8、列车的位置在列车的运行曲线中的位置为速度上升或匀速运行的阶段,且在列车达到v浮时开始动作,v轮限的限速前完成收轮动作;
9、其中,v浮为列车可靠悬浮的速度,v轮限为所述车轮的最高允许速度。
10、在一些实施例中,在列车速度到达v浮时刻,列车的加速度a车的均值为非负,此时若支撑轮和导向轮处于非收起状态则进行收轮动作。
11、在一些实施例中,在列车速度到达第一阈值时间内的列车加速度均值a均前:
12、
13、其中,t表示支撑轮和导向轮从解锁、开始动作、动作到位以及锁闭整个动作过程的时间,a车为列车的加速度,t轮动为支撑轮和导向轮动作时间,第一阈值为v浮时刻前t0至t0+1/2t轮动时间。
14、在一些实施例中,所述支撑轮和导向轮的落轮保持同步。
15、在一些实施例中,控制所述车轮的落轮操作,包括:
16、列车的位置在列车的运行曲线中的位置为速度下降阶段,且在列车达到第二阈值时由地面运控系统向车载运控系统发送落轮指令,在v浮时完成落轮动作;
17、其中,第二阈值为:v浮+a均前*(t轮动+ t无延+t系延)+v安;
18、v浮为列车可靠悬浮的速度,v安为安全余量经验值,用于平衡a均前*t轮动的值,t无延为无线传输所允许的最大延迟时间,t系延为整个控制系统所允许的最大延迟时间,a均前为列车速度到达v浮时刻前t0至t0+1/2t轮动时间内的列车加速度均值。
19、在一些实施例中,在列车速度到达第二阈值时刻的前1/2t轮动的时间内,列车的加速度a均前的均值为非正,在列车速度达到第三阈值时,列车的加速度a车的均值为负,此时若支撑轮和导向轮处于非落下状态则进行落轮动作;
20、其中,第三阈值为:a均前*(t轮动+ t无延+t系延)。
21、在一些实施例中,列车速度到达v浮时刻前t0至t0+1/2t轮动时间内的列车加速度均值a均前:
22、
23、其中,t表示支撑轮和导向轮从解锁、开始动作、动作到位以及锁闭整个动作过程的时间。
24、在一些实施例中,地面运控系统向何在运控系统发出落轮操作指令,包括:
25、列车的位置在列车的运行曲线中的位置为速度下降阶段,当a均前0且a车0或者a均前=0且a车0,且支撑轮和导向轮处于非落下状态时,由地面运控系统向车载运控系统发送落轮指令进行落轮动作,否则,不进行支撑轮和导向轮的落轮操作。
26、在一些实施例中,所述列车的运行曲线为列车的自动驾驶曲线或运行防护曲线。
27、在一些实施例中,还提供一种基于地面运控系统的列车车轮控制系统,其中,所述系统包括:
28、获取单元,被配置为获取由地面运控系统计算出的列车的运行曲线;
29、判断单元,被配置为根据列车的位置在所述运行曲线的位置,判断列车的运动趋势;
30、车载控制单元,被配置为根据列车的运动趋势,控制所述车轮的收轮或落轮,其中,所述车轮包括支撑轮和导向轮。
31、在一些实施例中,列车的运动趋势包括速度上升阶段、匀速运行阶段以及速度下降阶段。
32、在一些实施例中,所述支撑轮和导向轮的收轮保持同步。
33、在一些实施例中,所述支撑轮和导向轮的落轮保持同步。
34、本发明的基于地面运控系统的列车车轮控制方法和系统,可以准确的实现对支撑轮和导向轮的精准控制,且本发明利用既然的设备解决临时限速传输的安全性问题,不改变既有的硬件设备,投资少,改造方便。
35、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所指出的结构来实现和获得。
技术特征:
1.一种基于地面运控系统的列车车轮控制方法,其中,所述方法包括:
2.根据权利要求1所述的基于地面运控系统的列车车轮控制方法,其中,列车的运动趋势包括速度上升阶段、匀速运行阶段以及速度下降阶段。
3.根据权利要求1或2所述的基于地面运控系统的列车车轮控制方法,其中,所述支撑轮和导向轮的收轮保持同步。
4.根据权利要求3所述的基于地面运控系统的列车车轮控制方法,其中,控制所述车轮的收轮操作,包括:
5.根据权利要求4所述的基于地面运控系统的列车车轮控制方法,其中,在列车速度到达v浮时刻,列车的加速度a车的均值为非负,此时若支撑轮和导向轮处于非收起状态则进行收轮动作。
6.根据权利要求4所述的基于地面运控系统的列车车轮控制方法,其中,在列车速度到达第一阈值时间内的列车加速度均值a均前:
7.根据权利要求1或2所述的基于地面运控系统的列车车轮控制方法,其中,所述支撑轮和导向轮的落轮保持同步。
8.根据权利要求7所述的基于地面运控系统的列车车轮控制方法,其中,控制所述车轮的落轮操作,包括:
9.根据权利要求8所述的基于地面运控系统的列车车轮控制方法,其中,在列车速度到达第二阈值时刻的前1/2t轮动的时间内,列车的加速度a均前的均值为非正,在列车速度达到第三阈值时,列车的加速度a车的均值为负,此时若支撑轮和导向轮处于非落下状态则进行落轮动作;
10.根据权利要求8或9所述的基于地面运控系统的列车车轮控制方法,其中,列车速度到达v浮时刻前t0至t0+1/2t轮动时间内的列车加速度均值a均前:
11.根据权利要求9所述的基于地面运控系统的列车车轮控制方法,其中,地面运控系统向何在运控系统发出落轮操作指令,包括:
12.根据权利要求4-6、8-9、11任一项所述的基于地面运控系统的列车车轮控制方法,其中,所述列车的运行曲线为列车的自动驾驶曲线或运行防护曲线。
13.一种基于地面运控系统的列车车轮控制系统,其中,所述系统包括:
14.根据权利要求13所述的基于地面运控系统的列车车轮控制系统,其中,列车的运动趋势包括速度上升阶段、匀速运行阶段以及速度下降阶段。
15.根据权利要求13或14所述的基于地面运控系统的列车车轮控制系统,其中,所述支撑轮和导向轮的收轮保持同步。
16.根据权利要求13或14所述的基于地面运控系统的列车车轮控制系统,其中,所述支撑轮和导向轮的落轮保持同步。
技术总结
本发明提出一种基于地面运控系统的列车车轮控制方法和系统,其中,所述方法包括:获取由地面运控系统计算出的列车的运行曲线;根据列车的位置在所述运行曲线的位置,判断列车的运动趋势;根据列车的运动趋势,控制所述车轮的收轮或落轮,其中,所述车轮包括支撑轮和导向轮。本发明可以准确的实现对支撑轮和导向轮的精准控制。
技术研发人员:杨明春,刘雪梅,崔俊锋,熊光华,贾云光,石晶
受保护的技术使用者:北京全路通信信号研究设计院集团有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!