电动升降式脚踏的制作方法
本技术涉及驾驶室踏板,特别涉及一种电动升降式脚踏。
背景技术:
1、轨道交通、车辆等的驾驶室底端通常设置踏板,驾驶员脚踏触碰踏板上的踏脚进行操作。由于轨道交通或车辆的驾驶室底端通常比较狭窄,驾驶员在长时间驾驶时脚部容易产生疲劳,而不同的驾驶员由于身高等原因,其感觉舒适的踏板高度是不同的。不同的驾驶员通过改变踏板的高度至其感到舒适的位置,可减轻长时间驾驶时脚部的疲劳度,或者同一个驾驶员也可调整踏板高度,从而调整脚部姿态,达到放松的目的。
2、公开号为cn108583600a的中国实用新型专利申请公开了一种电动脚踏装置及其调节方法,装置包括沿垂向设置的侧架板和与水平面成15度夹角的脚踏板,两个侧架板并排设置,脚踏板固定在两个侧架板上,两个侧架板之间装有摇臂调节动力机构,所述的摇臂调节动力机构位于脚踏板下方,且定位在地面上,摇臂调节动力机构的调节运动,带动两个侧架板同步同向摆动,调节脚踏板的位置。其中,摇臂调节动力机构包括贴合固定在地面上的两个底板支架(31)、摆臂动力组件(32)和摇臂连杆组件(33),所述的两个底板支架(31)通过摇臂连杆组件(33)连接,两个侧架板(2)分别装在摇臂连杆组件(33)上,摆臂动力组件(32)装在一个底板支架(31)上且与摇臂连杆组件(33)传动连接,启动摆臂动力组件(32),带动摇臂连杆组件(33)在底板支架(31)上做圆弧摆动,带动两个侧架板(2)同步同向摆动。摇臂连杆组件(33)包括四个摇臂(33.1)和两个连杆(33.2),所述的底板支架(31)的两侧分别铰接一个摇臂(33.1),四个摇臂(33.1)呈矩形排列分布,底板支架(31)同一侧的摇臂(33.1)通过连杆(33.2)连接,侧架板(2)装在底板支架(31)同一侧的摇臂(33.1)上,一个底板支架(31)两侧的摇臂(33.1)分别与摆臂动力组件(32)固定,启动摆臂动力组件(32),带动一个底板支架(31)两侧的摇臂(33.1)摆动,通过连杆(33.2)带动另一个底板支架(31)两侧的摇臂(33.1)同步同向摆动,从带动两个侧架板(2)同步同向摆动。该方案中摇臂是绕铰接点旋转的,因此其所控制的踏板同样只能为平行四边形运动,当踏板需要在旋转抬起的同时调整倾斜角度、且让踏板前后位置改变较少时,通过该方案难以实现。
技术实现思路
1、本实用新型的目的是:针对上述背景技术中存在的不足,提供一种调整方式更加合理的踏板。
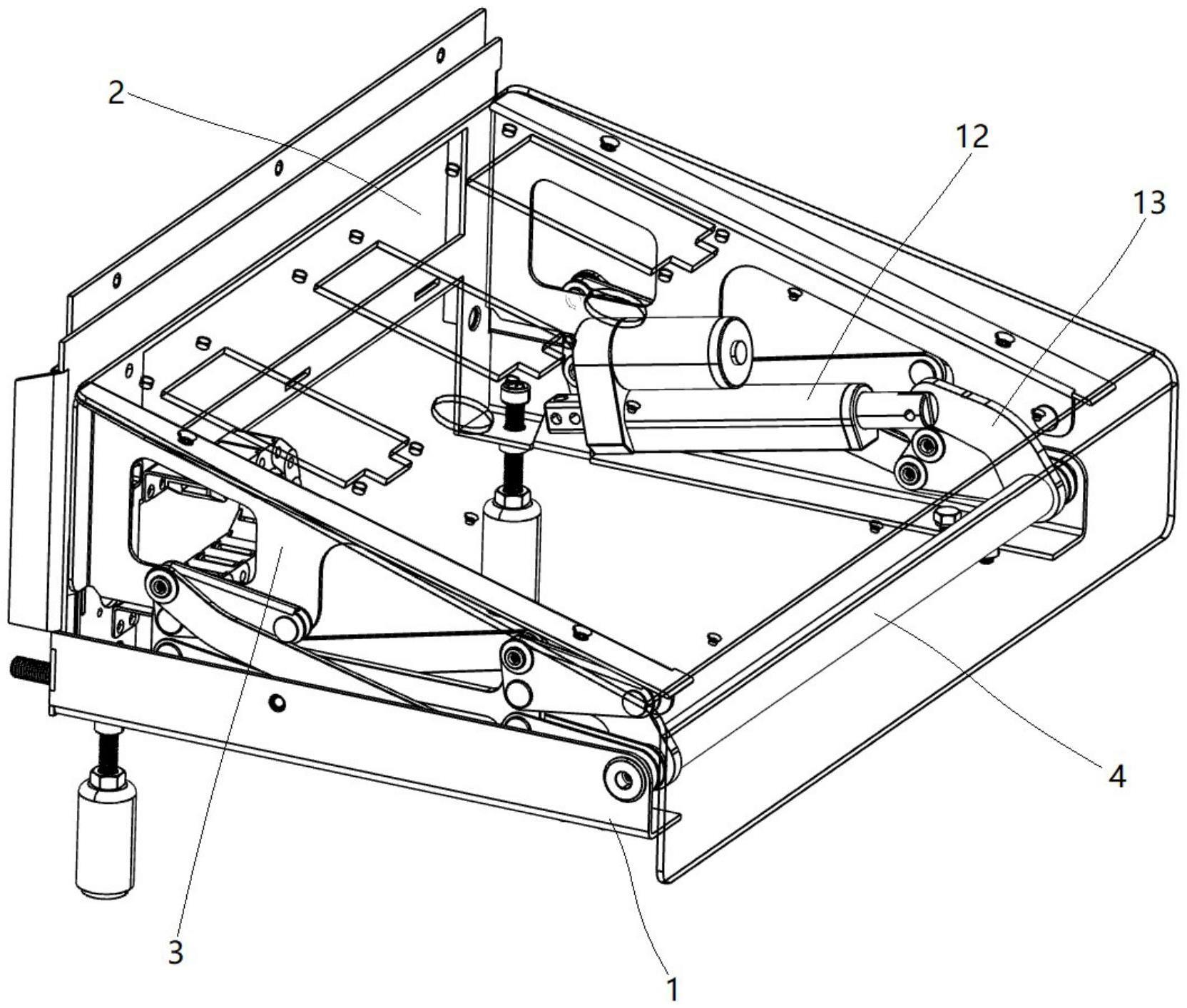
2、为了达到上述目的,本实用新型提供了一种电动升降式脚踏,包括踏板底座、踏板盖板以及沿垂向设置的侧架板,所述踏板盖板设置在所述侧架板之间,所述踏板底座设置有摇臂驱动机构以及摇臂连杆组件,所述侧架板通过所述摇臂连杆组件与所述踏板底座连接,所述摇臂驱动机构用于驱动所述摇臂连杆组件运动;
3、所述摇臂连杆组件包括主转动轴、连接在所述主转动轴端部的第一摇臂,以及连接在所述踏板底座上的第二摇臂,所述第一摇臂与所述第二摇臂之间铰接有第一连接臂,以使所述第一摇臂与所述第二摇臂之间同步运动;
4、所述第一摇臂或所述第一连接臂的第一端同时铰接有第三摇臂,所述第二摇臂或所述第一连接臂的第二端同时铰接有第四摇臂,所述第三摇臂、所述第四摇臂分别与所述侧架板的两端连接;
5、还包括第二连接臂与第三连接臂,所述第二连接臂的两端分别铰接所述第二摇臂与所述第三摇臂,所述第三连接臂的两端分别铰接所述第一摇臂与所述第四摇臂。
6、进一步地,所述第一连接臂的两端均设置有两个铰接点,所述第一摇臂、所述第三摇臂分别铰接在所述第一连接臂第一端的两个不同铰接点,所述第二摇臂、所述第四摇臂分别铰接在所述第一连接臂第二端的两个不同铰接点。
7、进一步地,所述第一摇臂的第一端与所述主转动轴固定连接,所述第二摇臂的第一端与所述踏板底座铰接,所述第一摇臂、所述第二摇臂的第二端设置有两个铰接点,所述第一摇臂的两个铰接点分别用于铰接所述第一连接臂以及所述第三连接臂,所述第二摇臂的两个铰接点分别用于铰接所述第一连接臂以及所述第二连接臂。
8、进一步地,所述第三摇臂、所述第四摇臂的第一端与所述侧架板铰接,所述第三摇臂、所述第四摇臂的第二端设置有两个铰接点,所述第三摇臂的两个铰接点分别用于铰接所述第一连接臂与所述第二连接臂,所述第四摇臂的两个铰接点分别用于铰接所述第一连接臂与所述第三连接臂。
9、进一步地,所述摇臂驱动机构为电推杆。
10、进一步地,所述电推杆的伸缩端通过传动块与所述主转动轴连接,以驱动所述主转动轴旋转。
11、本实用新型的上述方案有如下的有益效果:
12、本实用新型提供的电动升降式脚踏,依靠摇臂连杆组件中第三摇臂、第四摇臂、第二连接臂以及第三连接臂的设置,使第一摇臂、第二摇臂、第一连接臂的整体作平行四边形运动的同时,第三摇臂与第一摇臂还相对于与第一连接臂的铰接点进行旋转运动,从而与第三摇臂、第四摇臂连接的侧架板的两个铰接点均具有两个运动的叠加,从而踏板盖板整体上能够接近垂直地升降,且倾斜角度会调整,当其升至最高点时踏板盖板接近水平角度,这种踏板的调节方式不仅使前后布置空间能够进一步减小,同时也能够更加适配抬升后用户脚步放置的习惯,进一步提升了用户的使用体验。
13、本实用新型的其它有益效果将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种电动升降式脚踏,包括踏板底座、踏板盖板以及沿垂向设置的侧架板,所述踏板盖板设置在所述侧架板之间,所述踏板底座设置有摇臂驱动机构以及摇臂连杆组件,所述侧架板通过所述摇臂连杆组件与所述踏板底座连接,所述摇臂驱动机构用于驱动所述摇臂连杆组件运动,其特征在于:
2.根据权利要求1所述的电动升降式脚踏,其特征在于,所述第一连接臂的两端均设置有两个铰接点,所述第一摇臂、所述第三摇臂分别铰接在所述第一连接臂第一端的两个不同铰接点,所述第二摇臂、所述第四摇臂分别铰接在所述第一连接臂第二端的两个不同铰接点。
3.根据权利要求1所述的电动升降式脚踏,其特征在于,所述第一摇臂的第一端与所述主转动轴固定连接,所述第二摇臂的第一端与所述踏板底座铰接,所述第一摇臂、所述第二摇臂的第二端设置有两个铰接点,所述第一摇臂的两个铰接点分别用于铰接所述第一连接臂以及所述第三连接臂,所述第二摇臂的两个铰接点分别用于铰接所述第一连接臂以及所述第二连接臂。
4.根据权利要求1所述的电动升降式脚踏,其特征在于,所述第三摇臂、所述第四摇臂的第一端与所述侧架板铰接,所述第三摇臂、所述第四摇臂的第二端设置有两个铰接点,所述第三摇臂的两个铰接点分别用于铰接所述第一连接臂与所述第二连接臂,所述第四摇臂的两个铰接点分别用于铰接所述第一连接臂与所述第三连接臂。
5.根据权利要求1所述的电动升降式脚踏,其特征在于,所述摇臂驱动机构为电推杆。
6.根据权利要求5所述的电动升降式脚踏,其特征在于,所述电推杆的伸缩端通过传动块与所述主转动轴连接,以驱动所述主转动轴旋转。
技术总结
本技术提供了一种电动升降式脚踏,包括踏板底座、踏板盖板以及沿垂向设置的侧架板,踏板盖板设置在侧架板之间,踏板底座设置有摇臂驱动机构以及摇臂连杆组件,侧架板通过摇臂连杆组件与踏板底座连接。本技术中第一摇臂、第二摇臂、第一连接臂的整体作平行四边形运动的同时,第三摇臂与第一摇臂还相对于与第一连接臂的铰接点进行旋转运动,从而与第三摇臂、第四摇臂连接的侧架板的两个铰接点均具有两个运动的叠加,从而踏板盖板整体上能够接近垂直地升降,且倾斜角度会调整,当其升至最高点时踏板盖板接近水平角度,不仅使前后布置空间能够进一步减小,同时也能够更加适配抬升后用户脚步放置的习惯,进一步提升了用户的使用体验。
技术研发人员:汪发现,刘彬彬,汪煦桐,刘革,杨学良,李殿伟,胡俊
受保护的技术使用者:湖南敏锐科技有限公司
技术研发日:20230117
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!