一种双大臂空车调车机用推车装置及其控制方法与流程
本发明涉及一种双大臂空车调车机用推车装置及其控制方法,具体适用于铁路敞车车辆运输卸料作业。
背景技术:
1、空车调车机是用于铁路翻车机翻、卸车系统中的重要设备,空车调车机配合设置于空车调车机轨道,可用于用来牵引敞车移动。
2、现有的空车调车机通常采用固定大臂结构,并为固定大臂设置配重,一台调车机通常只采用一条空车线推送空车作业。当空车调车机需要兼顾两路空车线的推车(间距6.5米)作业时,原有的空车调车机无法满足使用需求,因此需要在同一台空车调车机上设置双大臂结构的推车装置,由于双大臂结构的空车调车机的结构与传统的空车调车机不同,该推车装置中的两个大臂互为配重,因此,需要一种双大臂空车调车机用推车装置的控制方法,对推车装置中的两个大臂进行协同控制,进而实现两路空车线推车作业。
技术实现思路
1、本发明的目的是克服现有技术中存在的空车调车机无法兼顾两路空车线的推车作业的问题,提供了一种一种双大臂空车调车机用推车装置的控制方法。
2、为实现以上目的,本发明的技术解决方案是:
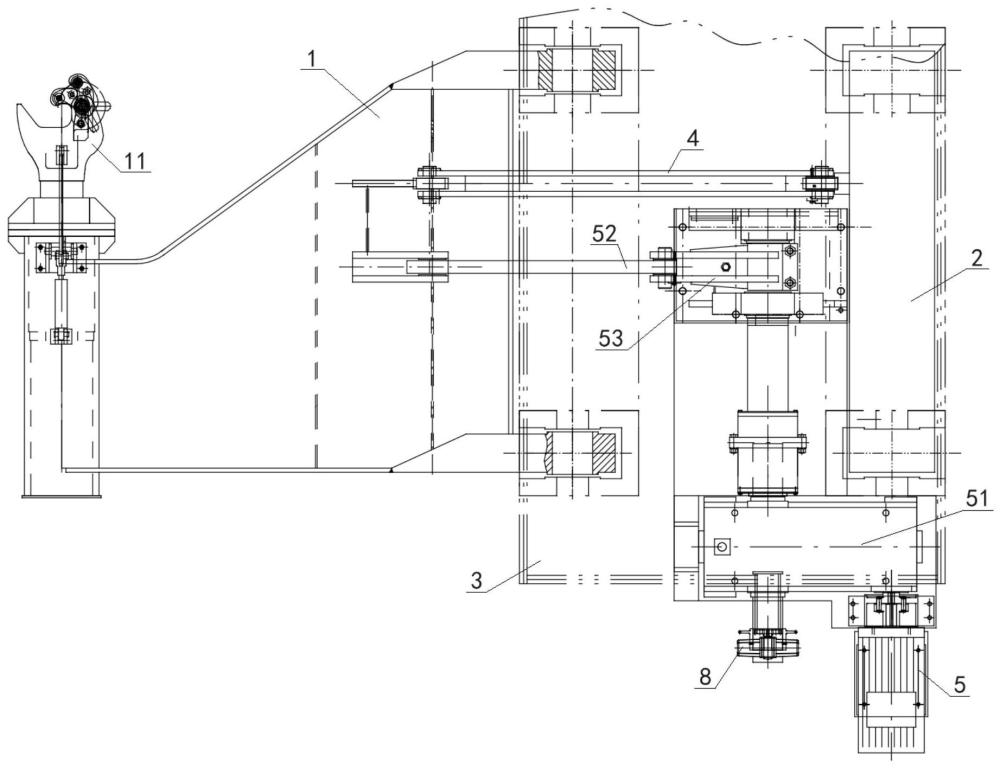
3、一种双大臂空车调车机用推车装置,所述推车装置包括主俯仰臂、副俯仰臂,所述主俯仰臂的顶部设置有主车钩,主俯仰臂的中部与连杆的一端铰接,主俯仰臂的底部与空车调车机车体的一侧铰接,所述空车调车机车体的另一侧与副俯仰臂的底部铰接,所述副俯仰臂的中部与连杆的另一端铰接,副俯仰臂的顶部设置有副车钩,所述空车调车机车体的顶部设置有电机,所述电机的输出轴与减速器的输入端相连接,所述减速器的输出轴与拉杆的一端传动配合,所述拉杆的另一端与主俯仰臂的中部铰接;
4、所述减速器的输出轴上固定设置有与其同轴的第一齿轮,所述第一齿轮与第二齿轮相啮合,所述第二齿轮与高度限制器的输入轴固定连接,所述高度限制器与空车调车机车体固定连接,高度限制器的信号输出端与控制器的俯仰臂位置信号输入端相连接,所述控制器的电机控制信号输出端通过变频器与电机的控制端相连接,控制器的制动器控制信号输出端与制动器的控制端相连接,所述制动器用于制动减速器的输出轴。
5、所述高度限制器内部设置有第一凸轮开关、第二凸轮开关、第三凸轮开关、第四凸轮开关、第五凸轮开关、第六凸轮开关;
6、所述第一凸轮开关用于在主俯仰臂向下转动至落臂终点位置时向控制器的俯仰臂位置信号输入端发送第一位置信号;
7、所述第二凸轮开关用于在主俯仰臂向下转动至第一预设位置时向控制器的俯仰臂位置信号输入端发送第二位置信号;
8、所述第三凸轮开关用于在主俯仰臂向上转动至第二预设位置时向控制器的俯仰臂位置信号输入端发送第三位置信号;
9、所述第四凸轮开关用于在主俯仰臂向上转动至抬臂终点位置时向控制器的俯仰臂位置信号输入端发送第四位置信号;
10、所述第五凸轮开关用于在主俯仰臂转动至落臂极限位置时向控制器的俯仰臂位置信号输入端发送第五位置信号;
11、所述第六凸轮开关用于在主俯仰臂转动至抬臂极限位置时向控制器的俯仰臂位置信号输入端发送第六位置信号;
12、所述控制器根据第一位置信号、第二位置信号、第三位置信号、第四位置信号、第五位置信号、第六位置信号控制电机、制动器运行。
13、所述第一凸轮开关、第二凸轮开关、第三凸轮开关、第四凸轮开关、第五凸轮开关、第六凸轮开关均为常闭开关,所述第一位置信号、第二位置信号、第三位置信号、第四位置信号、第五位置信号、第六位置信号均为下降沿信号。
14、所述减速器的输出轴与摇臂的一端垂直连接,所述摇臂的另一端与拉杆远主俯仰臂的一端铰接。
15、所述推车装置的控制方法包括主俯仰臂下降、副俯仰臂上升控制和主俯仰臂上升、副俯仰臂下降控制;
16、所述主俯仰臂下降、副俯仰臂上升控制具体包括:
17、所述控制器通过变频器控制电机的转轴正向旋转,电机带动主俯仰臂向下转动,此时副俯仰臂跟随主俯仰臂转动;
18、所述主俯仰臂向下转动至第一预设位置时,第二凸轮开关向控制器发送第二位置信号,控制器接收到第二位置信号后通过变频器控制电机降速旋转;
19、所述主俯仰臂向下转动至落臂终点位置时,第一凸轮开关向控制器发送第一位置信号,控制器接收到第一位置信号后通过变频器控制电机的转速降低至0,同时控制器控制制动器对减速器进行制动,主俯仰臂、副俯仰臂停止动作;
20、所述主俯仰臂上升、副俯仰臂下降控制具体包括:
21、所述控制器通过变频器控制电机的转轴反向旋转,电机带动主俯仰臂向上转动,此时副俯仰臂跟随主俯仰臂转动;
22、所述主俯仰臂向上转动至第二预设位置时,第三凸轮开关向控制器发送第三位置信号,控制器接收到第三位置信号后通过变频器控制电机降速旋转。
23、所述主俯仰臂向上转动至抬臂终点位置时,第四凸轮开关向控制器发送第四位置信号,控制器接收到第四位置信号后通过变频器控制电机的转速降低至0,同时控制器控制制动器对减速器进行制动,主俯仰臂、副俯仰臂停止动作。
24、所述主俯仰臂下降、副俯仰臂上升控制还包括:
25、所述主俯仰臂经过落臂终点位置后继续转动至落臂极限位置时第五凸轮开关向控制器发送第五位置信号,所述控制器接收到第五位置信号后控制电机动力回路的断路器断开、制动器抱死;
26、所述主俯仰臂上升、副俯仰臂下降控制还包括:
27、所述主俯仰臂经过抬臂终点位置后继续转动至抬臂极限位置时,第六凸轮开关向控制器发送第六位置信号,所述控制器接收到第六位置信号后控制电机动力回路的断路器断开、制动器抱死。
28、所述控制器的报警信号输出端与报警器的控制端相连接,控制器接收到第五位置信号或第六位置信号时,控制器控制报警器示警。
29、与现有技术相比,本发明的有益效果为:
30、1、本发明一种双大臂空车调车机用推车装置中,推车装置包括主俯仰臂、副俯仰臂,主俯仰臂、副俯仰臂各负责一条空车线的推车作业,副俯仰臂的底部与调车机车体的一侧铰接,所述调车机车体的另一侧与主俯仰臂的底部铰接,主俯仰臂的中部与连杆的一端铰接,连杆的另一端与副俯仰臂的中部铰接,同时,调车机车体的顶部设置有电机与减速器,减速器的输出轴通过摇臂与拉杆的一端传动配合,拉杆的另一端与主俯仰臂的中部铰接,主俯仰臂、副俯仰臂、连杆和调车机车体形成四连杆结构,通过plc控制器控制一台电机的输出轴转动,即可达到同时控制主俯仰臂和副俯仰臂动作的目的,控制方式简单。因此,本设计中,通过plc控制器控制一台电机的输出轴转动,即可达到同时控制主俯仰臂和副俯仰臂动作的目的,控制方式简单。
31、2、本发明一种双大臂空车调车机用推车装置中,主俯仰臂处于落臂终点位置时,主俯仰臂顶部的主车钩位于对应的空车线轨道面上方880mm处,所述主俯仰臂处于抬臂终点位置时,副俯仰臂顶部的副车钩位于对应的空车线轨道面上方880mm处,由于敞车的车钩中心线高(空车)高度大约为880mm,因此,在主俯仰臂下降至落臂终点位置后,主俯仰臂顶部的主车钩可与相应的空车线轨道上的空敞车挂钩,执行相应的空车线上的空敞车推车作业;在在主俯仰臂上升至抬臂终点位置时,副俯仰臂顶部的副车钩可与相应的空车线上的空敞车对接,执行相应的空车线轨道上的空敞车推车作业,该推车装置可负责两条空车线的推车作业。因此,本设计中推车装置可负责两条空车线的推车作业,设备利用率高。
32、3、本发明一种双大臂空车调车机用推车装置的控制方法中,主俯仰臂下降至落臂终点位置时,主俯仰臂执行推车作业,此时副俯仰臂上升至较高的位置,副俯仰臂不与调车机侧部的其它设备发生干涉;副俯仰臂执行推车作业时,主俯仰臂上升至抬臂终点位置,主俯仰臂不与调车机侧部的其它设备发生干涉,确保作业安全。因此,本设计中推车装置中任意一个俯仰臂处于工作状态时,另一空闲状态下的俯仰臂不会与调车机侧部的其它设备发生干涉,确保作业安全。
33、4、本发明一种双大臂空车调车机用推车装置的控制方法中,高度限制器内设置第一凸轮开关、第二凸轮开关、第三凸轮开关、第四凸轮开关、第五凸轮开关、第六凸轮开关共六组凸轮开关,通过第五凸轮开关、第六凸轮开关可检测主俯仰臂是否到达落臂极限位置、抬臂极限位置,避免俯仰臂过度动作,保护俯仰臂及电机;通过第一凸轮开关、第四凸轮开关判断主俯仰臂、副俯仰臂是否到达工作位置,确保俯仰臂顶部的车钩能够与空敞车挂钩;通过凸轮开关、凸轮开关的信号控制电机转动的速度,确保两个俯仰臂可以快速、安全的动作到位。因此,本设计中高度限制器内设置有六组凸轮开关,plc控制器根据六组凸轮开关的信号控制俯仰臂动作,确保两个俯仰臂可以快速、安全的动作到位,并与空敞车挂钩,执行推车作业。
34、5、本发明一种双大臂空车调车机用推车装置的控制方法中由于设备现场线路比较复杂,容易出现电压不稳的情况,若选取凸轮开关闭合为指示信号,则可能会出现开关误闭合产生误信号的情况,因此将第一凸轮开关、第二凸轮开关、第三凸轮开关、第四凸轮开关、第五凸轮开关、第六凸轮开关均为设置为常闭开关,并以凸轮开关断开为指示信号,第一位置信号、第二位置信号、第三位置信号、第四位置信号、第五位置信号、第六位置信号均为下降沿信号,避免误触发信号。因此,本设计中使用凸轮开关断开信号作为指示信号,避免误触发信号。
- 还没有人留言评论。精彩留言会获得点赞!