一种智能汽车的人机共享转向控制方法与流程
[0001]
本发明属于智能汽车驾驶辅助系统领域,尤其涉及一种智能汽车的人机共享转向控制方法。
背景技术:
[0002]
随着汽车保有量的日益增长,道路交通环境变得越来越复杂,这对提升车辆的行驶安全性、驾乘舒适性提出了迫切需要。智能汽车通过搭载传感部件、计算单元和先进的控制执行装置,能够在感知、决策和执行三个方面协助驾驶员操控车辆,是提高汽车主动安全性、改善驾乘舒适性、减少或避免交通事故发生的有效措施。作为智能汽车的核心技术之一,人机共享转向控制是指驾驶员和自动化系统均具有对车辆转向功能的在线控制权,是保证车辆跟踪预期路径的关键技术。在人机共享转向控制技术中,自动化系统通过主动转向装置或线控转向装置实时地对驾驶员操纵行为进行修正和补偿,以达到改善路径跟踪性能和减轻驾驶员负担的目的。
[0003]
为满足汽车电控系统的实时性通信需求及性能要求,共享车载网络被广泛应用于智能汽车,比如控制器局域网络(controller area network,can)、局域互联网络(local interconnect network,lin)等。一方面,车载网络通信具备实现信息资源共享、提高诊断能力、降低成本、易于扩展和维护等优点,大大促进了汽车智能化、自动化、标准化的发展;另一方面,车载网络的带宽是有限的,这一事实不可避免地造成诸如网络诱导延迟、数据丢包、通信拥塞等约束问题,给当前的控制设计带来严峻的挑战。目前,专利号为cn 107323457 b的发明专利中提出了一种基于约束模型预测理论的人机协同的共享转向控制方法,然而该方法并未考虑系统中的网络诱导延迟因素,这将削弱所设计控制器的性能甚至导致系统的失稳。
技术实现要素:
[0004]
为了实现网络通信环境下智能汽车的人机共享控制,本发明进一步考虑网络诱导延迟、信号传输延迟和执行器延迟,提供一种具有时延鲁棒性的人机共享控制方法,旨在提升时延通信环境下智能汽车的路径跟踪性能和驾驶员操纵舒适性。
[0005]
本发明所采用的技术方案如下:
[0006]
一种智能汽车的人机共享控制方法,通过以下步骤实现:
[0007]
分别建立车辆动力学方程、车辆运动学方程和单点预瞄驾驶员转向模型,进而建立全局的人-车-路系统模型;
[0008]
针对所建立的人-车-路系统模型进行后续的控制设计,包括确定系统控制目标以及设计智能汽车的人机共享转向系统,所述系统控制目标是保证车辆以最小的侧向误差和航向角误差来跟踪期望路径,满足||z(t)||2<γ||ω(t)||2,其中,输出性能向量z(t)=[y
e ψ
e
]
t
=cx(t),x(t)为系统的状态向量,c为被控输出矩阵;y
e
指车辆在预瞄距离l
d
处与期望路径的侧向误差,其可表示为y
e
=y
c
+l
d
ψ
e
;y
c
和ψ
e
分别表示车辆当前位置的侧向误差和航
向角误差,其中ψ
e
可表示为车辆实际横摆角ψ和期望航向角ψ
d
的差,即ψ
e
=ψ-ψ
d
;ρ(σ)指道路曲率,γ为采用共享转向控制器得到的闭环系统对于外部干扰的抑制指标参考值,ω(t)为系统的干扰输入;所述人机共享转向系统的控制输入u(t)=kx(t-τ(t)),其中τ(t)指控制回路中总的时间延迟,其为网络诱导延迟、信号传输延迟、执行器延迟之和,并满足0≤τ
m
≤τ(t)≤τ
m
,式中,τ
m
和τ
m
分别代表控制回路中总时间延迟的下界和上界,k代表共享转向控制器的增益矩阵;
[0009]
通过计算控制输入u(t)=kx(t)获得主动转向角,通过人机共享转向系统将所述主动转向角施加于车辆,实现智能汽车路径跟踪与安全行驶。
[0010]
进一步地,所述车辆动力学方程如下:
[0011][0012]
其中:
[0013]
f
yf
=f
yfl
+f
yfr
=2c
f
α
f
,f
yr
=f
yrl
+f
yrr
=2c
r
α
r
,指前
[0014]
轮转向角;δ
d
和δ
c
分别指驾驶员的方向盘转角和转向系统的主动转向角;r
s
指转向系统的传动比;v
y
和v
x
分别指车辆的侧向速度和纵向速度;ψ、和分别指车辆的横摆角、横摆角速度和横摆角加速度;β指车辆的质心侧偏角,其可近似为v
y
和v
x
的比值;f
w
和l
w
指车辆受的侧向干扰力及受力点与质心的距离;i
z
指车辆的横摆转动惯量;l
f
和l
r
分别指车辆质心到前轴和后轴的距离;f
yf
表示前轮的总侧偏力,其为前左轮侧偏力f
yfl
和前右轮侧偏力f
yfr
之和;f
yr
表示后轮的总侧偏力,其为后左轮侧偏力f
yrl
和后右轮侧偏力f
yrr
之和;c
f
和c
r
分别指车辆前后轮胎的侧偏刚度;α
f
表示前轮侧偏角;α
r
表示后轮侧偏角。
[0015]
进一步地,所述车辆运动学方程如下:
[0016][0017]
其中,y
e
指车辆在预瞄距离l
d
处与期望路径的侧向误差,其可表示为y
e
=y
c
+l
d
ψ
e
;y
c
和ψ
e
分别表车辆当前位置的侧向误差和航向角误差,其中ψ
e
可表示为车辆实际横摆角ψ和期望航向角ψ
d
的差,即ψ
e
=ψ-ψ
d
;ρ(σ)指道路曲率。
[0018]
进一步地,所述单点预瞄驾驶员转向模型如下:
[0019][0020]
近似为式中τ
d
=τ
d1
+τ
d2
,s为拉氏变换算子;驾驶员转向模型在时域的表达式为:
[0021][0022]
其中,g
h
,τ
d1
,τ
d2
和τ
p
分别指驾驶员模型中的驾驶员转角增益,纯时延,神经肌肉时
延和预瞄时间;τ
d
=τ
d1
+τ
d2
,δ
d
和y
p
分别代表驾驶员转角δ
d
和驾驶员预瞄距离l
p
处的横向误差y
p
,其中l
p
可表示为l
p
=τ
p
v
x
,y
p
可表示为y
p
=y
e
+(l
p-l
d
)ψ
e
;s为拉氏变换算子;分别代表驾驶员转角的一阶导数和二阶导数。
[0023]
进一步地,所述人-车-路系统模型为:
[0024]
式中,ω(t)=[f
w
ρ(σ)]
t
,u(t)=δ
c
,
[0025][0026][0027]
式中,x(t)为系统的状态向量,ω(t)为系统的干扰输入,u(t)为系统的控制输入,a、b1和b2分别为系统矩阵、干扰输入矩阵和控制输入矩阵。
[0028]
进一步地,所述人机共享转向系统的控制输入u(t)=kx(t-τ(t))中,控制器的增益矩阵k通过求下面两个线性不等式来获得且它的计算公式为:k=yw-1
,在下面两个不等式中,τ
m
、τ
m
、κ和γ是用户根据实际需要给定的正数,p、r1、r2、s1、s2、q1、q2、q3、q4为适当维数的正定矩阵,m1、m2、w和y是适当维数的一般矩阵;
[0029][0030][0031]
式中:
[0032][0033][0034]
[0035][0036]
ω6=[γ5γ6]+[γ5γ6]
t
[0037]
γ1=diag(s2+q
3 3(s2+q3) 5(s2+q3)),γ2=diag(s2+q
4 3(s2+q4) 5(s2+q4))
[0038]
γ3=diag(q
3 3q
3 5q3),γ4=diag(q
4 3q
4 5q4)
[0039]
γ5=e1+e
11
β,
[0040]
f1(t)=[e
1 τ
m
e
5 (τ(t)-τ
m
)e6+(τ
m-τ(t))e
7 τ
m
e8],f2=[e
11 e
1-e
2 e
2-e
4 2(e
1-e5)]
[0041]
f3=[e
2-e
3 e2+e
3-2e
6 e
2-e3+6e
6-6e9],f4=[e
3-e
4 e3+e
4-2e
7 e
3-e4+6e
7-6e
10
]
[0042][0043]
τ
c
=τ
m-τ
m
,其中n=1,2,...,12。
[0044]
进一步地,使用得到的共享转向控制器进行智能汽车的在线控制,使得全局系统满足渐近稳定性和期望的性能要求||z(t)||2<γ||ω(t)||2,其中γ为抑制指标参考值。
[0045]
本发明的有益效果体现在:
[0046]
本发明在智能汽车的人机共享转向控制中考虑了控制回路中的时间延迟现象,该延迟包括网络诱导延迟、信号传输延迟、执行器延迟三种类型,从而在保证汽车的路径跟踪性能的同时具有较强的鲁棒性,在时延环境下更具优越性。
附图说明
[0047]
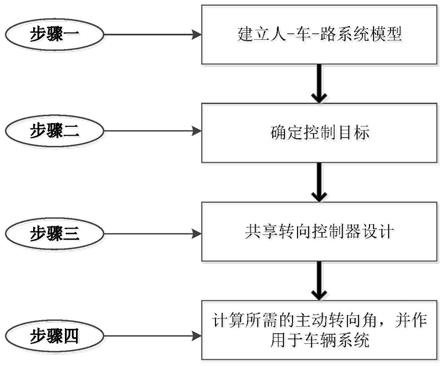
图1为本发明的设计流程图。
[0048]
图2为本发明集成车辆运动学和动力学的机理模型图。
[0049]
图3为本发明实施例涉及j-turn工况下车辆路径对比图。
[0050]
图4为本发明实施例涉及j-turn工况下车辆航向角对比图。
[0051]
图5为本发明实施例涉及j-turn工况下驾驶员转角对比图。
[0052]
图6为本发明实施例涉及j-turn工况下驾驶员转角变化率对比图。
具体实施方式
[0053]
下面结合附图和具体实施例对发明作进一步说明,以使本领域的技术人员可以更好的理解本发明并能予以实施,但所举实例不能作为本发明的限定。
[0054]
图1为本发明实施的流程图,包括以下步骤:
[0055]
步骤一、建立人-车-路系统模型:
[0056]
分别将车辆动力学行为、运动学行为和驾驶员转向行为考虑到车辆系统的建模中,人-车-路系统是综合车辆动力学、车辆运动学、驾驶员转向行为及道路曲率信息为一体的闭环系统。
[0057]
1)如图2所示,x-y为固定于地面的平面坐标系,其中x表示直路面的方向,y表示与x轴垂直的方向;x-y为固定于车辆的坐标系,其中x表示车辆的纵向,y表示车辆的侧向,其坐标系原点位于车辆质心。本发明重点关注车辆的侧向动力学及稳定性,忽略车辆的纵向力行为,在小转角假设下建立车辆动力学方程:
[0058][0059]
其中,f
yf
=f
yfl
+f
yfr
=2c
f
α
f
,f
yr
=f
yrl
+f
yrr
=2c
r
α
r
,,指前轮转向角,单位为:rad;δ
d
和δ
c
分别指驾驶员的方向盘转角和转向系统的主动转向角,单位均为:rad;r
s
指转向系统的传动比,单位为1;v
y
和v
x
分别指车辆的侧向速度和纵向速度,单位均为:m/s;ψ、和分别指车辆的横摆角、横摆角速度和横摆角加速度,单位分别为:rad、rad/s和rad/s2;β指车辆的质心侧偏角,单位为:rad,其可近似为v
y
和v
x
的比值;f
w
和l
w
指车辆受的侧向干扰力及受力点与质心的距离,单位为:n和m;i
z
指车辆的横摆转动惯量,单位为:kg
·
m2;l
f
和l
r
分别指车辆质心到前轴和后轴的距离,单位均为:m;f
yf
表示前轮的总侧偏力,其为前左轮侧偏力f
yfl
和前右轮侧偏力f
yfr
之和,单位均为:n;f
yr
表示后轮的总侧偏力,其为后左轮侧偏力f
yrl
和后右轮侧偏力f
yrr
之和,单位均为:n;c
f
和c
r
分别指车辆前后轮胎的侧偏刚度,单位为:n/rad;α
f
表示前轮侧偏角,单位为:rad;α
r
表示后轮侧偏角,单位为:rad。
[0060]
2)如图2所示,建立车辆运动学方程:
[0061][0062]
其中,y
e
指车辆在预瞄距离l
d
处与期望路径的侧向误差,单位为:m,其可表示为y
e
=y
c
+l
d
ψ
e
;y
c
和ψ
e
分别表车辆当前位置的侧向误差和航向角误差,单位分别为:m和rad,其中ψ
e
可表示为车辆实际横摆角ψ和期望航向角ψ
d
的差,即ψ
e
=ψ-ψ
d
;ρ(σ)指道路曲率,单位为:1/m。
[0063]
3)建立单点预瞄驾驶员转向模型:
[0064]
[0065]
近似为其中g
h
,τ
d1
和τ
d2
分别指驾驶员模型中的驾驶员转角增益、纯时延和神经肌肉时延,单位分别为:1、秒和秒;τ
d
=τ
d1
+τ
d2
,δ
d
和y
p
分别代表驾驶员转角和驾驶员预瞄距离l
p
处的横向误差,单位分别为:rad和m,其中l
p
可表示为l
p
=τ
p
v
x
,y
p
可表示为y
p
=y
e
+(l
p-l
d
)ψ
e
;s为拉氏变换算子。
[0066]
驾驶员转向模型在时域的表达式为:
[0067][0068]
式中,分别代表驾驶员转角的一阶导数和二阶导数,τ
p
表示预瞄时间,单位为秒。
[0069]
4)最后,建立人-车-路系统模型:其中x(t)为系统的状态向量,ω(t)为系统的干扰输入,u(t)为系统的控制输入,a、b1和b2分别为系统矩阵、干扰输入矩阵和控制输入矩阵。
[0070]
式中,ω(t)=[f
w ρ(σ)]
t
,u(t)=δ
c
,
[0071][0072][0073]
步骤二、确定控制目标
[0074]
共享转向控制的目的是保证车辆能够以最小的侧向误差和航向角误差来跟踪期望路径(reference path),同时,好的路径跟踪性能也意味着车辆动力稳定性和驾驶员操纵舒适性得到保证。因此,输出性能向量如下:
[0075]
z(t)=[y
e ψ
e
]
t
=cx(t)
[0076]
式中,c代表被控输出矩阵,
[0077]
考虑性能指标为:||z(t)||2<γ||ω(t)||2,其中γ为抑制指标参考值,其大小可由用户在容许范围内根据实际需要进行调节。
[0078]
步骤三、共享转向控制器设计:
[0079]
针对智能汽车的人机共享转向系统的控制输入为:
[0080]
u(t)=kx(t-τ(t))
[0081]
其中,u(t)代表控制输入量,t表示时间变量,τ(t)指控制回路中总的时间延迟(即为网络诱导延迟、信号传输延迟和执行器延迟之和)并满足0≤τ
m
≤τ(t)≤τ
m
。其中,τ
m
和τ
m
分别代表控制回路中总时间延迟的下界和上界,k代表控制器的增益矩阵。给定正数τ
m
、τ
m
、κ和γ,如果存在适当维数的正定矩阵p、r1、r2、s1、s2、q1、q2、q3、q4,一般矩阵m1、m2、w和y使得下面两个线性不等式同时成立,则控制增益矩阵的计算公式为:k=yw-1
。
[0082][0083][0084]
式中各矩阵的表示如下:
[0085][0086][0087][0088]
ω6=[γ5γ6]+[γ5γ6]
t
[0089]
γ1=diag(s2+q
3 3(s2+q3) 5(s2+q3)),γ2=diag(s2+q
4 3(s2+q4) 5(s2+q4))
[0090]
γ3=diag(q
3 3q
3 5q3),γ4=diag(q
4 3q
4 5q4)
[0091]
γ5=e1+e
11
β,
[0092]
f1(t)=[e
1 τ
m
e
5 (τ(t)-τ
m
)e6+(τ
m-τ(t))e
7 τ
m
e8],f2=[e
11 e
1-e
2 e
2-e
4 2(e
1-e5)]
[0093]
f3=[e
2-e
3 e2+e
3-2e
6 e
2-e3+6e
6-6e9],f4=[e
3-e
4 e3+e
4-2e
7 e
3-e4+6e
7-6e
10
]
[0094]
[0095]
τ
c
=τ
m-τ
m
,其中n=1,2,...,12,*表示矩阵中的对称项,x
t
表示矩阵x的转置。
[0096]
τ
m
、τ
m
、κ和γ是用户根据实际需要给定的正数。p、r1、r2、s1、s2、q1、q2、q3、q4为任意适当维数的正定矩阵,m1、m2、w和y是任意适当维数的一般矩阵,上述矩阵是为了推导出控制器设计条件而定义的任意适当维数矩阵,其意义是为了构建保证系统满足稳定性和性能要求的充分条件。因此,上述两个线性矩阵不等式(linear matrix inequality,lmi)是期望控制器存在的一个充分条件且具备可解性,通过相应的lmi工具箱求解上述两个矩阵不等式便可得到期望的人机共享控制器增益k。
[0097]
步骤三、计算控制输入u(t)=kx(t-τ(t)),其中,所计算的控制输入则为所需的主动转向角大小并通过人机共享转向系统施加于车辆,进行智能汽车的在线控制,从而实现智能汽车路径跟踪与安全行驶。
[0098]
本实施例在智能汽车的人机共享转向控制中考虑了控制回路中的时间延迟现象,该延迟包括网络诱导延迟、信号传输延迟、执行器延迟等类型,从而在保证汽车的路径跟踪性能的同时具有较强的鲁棒性,在时延环境下更具优越性。
[0099]
本实施例中使用的人-车-路系统的主要技术性能指标和设备参数为:m=1412kg,i
z
=1536.7kg
·
m2,c
f
=49412n/rad,c
r
=60174n/rad,l
f
=1.016m,l
r
=1.458m,v
x
=10m/s,l
d
=0.5m,f
w
=300n,l
w
=0.3m,g
h
=-2,τ
d1
=0.10s,τ
d2
=0.22s,τ
p
=1.5s,r
s
=22,τ
m
=0.001s、τ
m
=0.039s、κ=1。γ为采用所述共享转向控制器得到的闭环系统对于外部干扰的抑制指标参考值,可由用户在容许范围内根据实际需要来调节设定。值得指出的是,本实例中满足不等式条件成立γ的最小值为γ
min
=2.4996,换句话说,只要使用者选择不小于该值的抑制指标参考值γ即可满足其需求。
[0100]
本实例中选取最小抑制指标参考值,即γ=2.4996。
[0101]
给定一条半径为500m的圆弧路径,其曲率为图3给出了j-turn工况下车辆路径对比图,图4为本发明实施例涉及j-turn工况下车辆航向角对比图,图5为本发明实施例涉及j-turn工况下驾驶员转角对比图,图6为本发明实施例涉及j-turn工况下驾驶员转角变化率对比图。从图中可以看出,本发明所述方法可以有效地降低了路径跟踪误差,同时很好地抑制了驾驶员转向角及其变化率,说明该方法能有效地提升路径跟踪精度和提高驾驶员操纵舒适性。
[0102]
以上实施例仅说明本发明的技术思想和特点,旨在能够使本领域的工作人员更好的理解并实施。本发明的保护范围不仅限于上述实施例,凡依据本发明所揭示的原理、设计思路所做的等同变化或修饰,均在本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1