一种四旋翼地形勘测小车
1.本申请涉及无人勘测设备技术领域,具体涉及一种四旋翼地形勘测小车。
背景技术:
2.我国无人车技术现已发展到较高水平,具有自主巡航和自动避障功能的无人驾驶设备技术日趋完善,当前无人驾驶设备发展方向为模块化及功能化,即搭载特定的传感器或摄像头等模块或装置便可实现相应的检测或其他功能。模块化的架构体系与框架日趋成熟,当前市场上出现了一大批无人车通过搭载摄像头、多传感器、机械臂或显示装置和通信模块广泛应用于生产生活中,给生活带来便利。
3.在小车上加装四旋翼,在市场上较为少见,针对各种复杂地形,驱动能够解决地形带来的种种问题,在各种地形条件下开展工作。四旋翼的设计亦能解决小车陷入泥泞之中的问题。
4.本实用新型涉及一种带有四旋翼地形勘测小车,旨在解决地形勘测小车在勘测过程中陷入泥泞地无法自拔的问题,采用四旋翼的结构,给车身一个向上的反作用力,使之能够以较小的功率走出当前的困境。
技术实现要素:
5.本实用新型提供了一种四旋翼地形勘测小车,适用于各种地形,搭载探测装置、警示装置和四旋翼装置,保证小车能够适应全地形的勘测工作。
6.一种四旋翼地形勘测小车,包括无人车、探测装置、警示装置和四旋翼装置,所述无人车的车厢内设有设有主控制器、电机、电路模块、gps卫星定位模块、激光雷达、4g通信模块、控制检测传感器,所述gps全球卫星定位模块用于显示小车当前所在位置,设定终点可确定巡航方向,所述无人车通过两根固定轴与探测装置连接,所述探测装置包括一用于图像采集的摄像头,该摄像头与两根固定轴之间通过转轴连接,可实现摄像头角度的上下变换与翻转,所述警示装置包括一用于警示的和可发光反光的三角警示牌、显示屏,所述三角警示牌与无人车之间采用推伸支撑轴进行连接,所述四旋翼装置采用空心连接轴安装于无人车的前后四个角处,所述三角警示牌通过一舵机与所述无人车进行连接,所述无人车通电后,所述舵机带动两舵机支撑架转动,两舵机支撑架之间采用铰链连接。
7.进一步,所述四旋翼装置包括四个向上推进器,分别对称设置于所述无人车的四个角处。
8.进一步,所述激光雷达用于实现无人车的避障功能,所述激光雷达抓取前方是否存在障碍物并进行判断,每隔一定时间进行360
°
视觉范围内的周边环境点采样,将障碍物以点的形式呈现,向没有障碍物的方向调整角度行驶,当激光雷达检测到前方路段出现较大落差时,传递信号给所述主控制器,所述主控制器强制命令电机反转,无人车减速并按原路倒退,旋转一定角度后继续向前行驶。
9.进一步,所述舵机侧面搭载一红外线传感器,当检测到与周边物体距离过近时,所
述红外线传感器将会发送信号给主控制器,所述主控制器接收信号并做出方向调整,避免发生边缘碰撞。
10.进一步,所述摄像头位于无人车上方的尾部,方向朝后,所述摄像头采集当前的地形信息,并将采集的数据传输给主控制器,并设定相应的图像识别算法,进行处理后得到三维建模后的信息。
11.进一步,所述无人车内部装有一陀螺仪,该陀螺仪能够检测无人车各个方位的加速度,和无人车所处的状态,当检测到无人车处于失重状态时,所述陀螺仪传递信号给所述主控制器,所述主控制器发送命令给所述四旋翼装置,该四旋翼装置转动启动工作。
12.进一步,所述四旋翼装置针对无人车的失重情况,如陷入泥浆、遇到小坑过程时,所述四旋翼装置工作,给所述无人车提供升力,平衡一定的重力,减小与所接触路面之间的摩擦,由此使得无人车脱离当前环境,当陀螺仪检测到无人车加速度不再发生变化时,主控制器控制四旋翼装置停止工作。
13.进一步,所述三角警示牌的底部设有一控制底座,所述三角警示牌紧贴一显示屏,该显示屏的左右两侧分别设有一反光布条。
14.本申请的有益效果在于:
15.(1)本实用新型能够应对各种极端崎岖地形,方便小车开展地形勘测工作;
16.(2)设计四旋翼装置,在需要的时刻给小车提供升力,小车陷入泥泞时可辅助小车摆脱困境;
17.(3)多传感器搭载,适用于各种地形的测绘和勘测工作,原理简单操作简易且有自主巡航功能;
18.(4)自动识别自身状态,四旋翼装置在小车车身失重条件下会触发并进行补偿。
附图说明
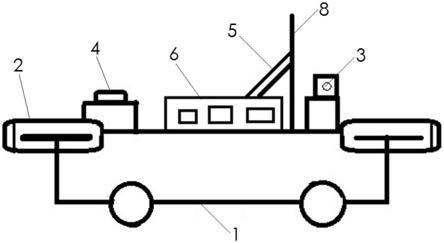
19.图1为本申请一种四旋翼地形勘测小车的整体结构示意图。
20.图2为本申请一种四旋翼地形勘测小车的俯视图。
21.图3为本申请一种四旋翼地形勘测小车中警示装置的结构示意图。
22.图4为本申请一种四旋翼地形勘测小车中舵机的结构示意图。
23.图中各符号代表:无人车1;向上推进器2;摄像头3;激光雷达4;舵机支撑架5;控制检测传感器6;显示屏7;三角警示牌8;反光布条9;控制底座10。
具体实施方式
24.下面结合附图对本实用新型的实施例作详细说明:本实施例在以本实用新型技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。
25.如图1
‑
4所示,一种四旋翼地形勘测小车,包括无人车1、探测装置、警示装置和四旋翼装置,无人车1的车厢内设有主控制器、电机、电路模块、gps卫星定位模块、激光雷达4、4g通信模块、控制检测传感器6,gps全球卫星定位模块用于显示小车当前所在位置,设定终点可确定巡航方向。
26.无人车1通过两根固定轴与探测装置连接,探测装置包括一用于图像采集的摄像
头3,该摄像头3与两根固定轴之间通过转轴连接,可实现摄像头3角度的上下变换与翻转。警示装置为一用于警示的和可发光反光的三角警示牌8,三角警示牌8与无人车1之间采用推伸支撑轴进行连接,四旋翼装置采用空心连接轴安装于无人车1的前后四个角处,三角警示牌8通过一舵机与无人车1进行连接,无人车1通电后,舵机带动两舵机支撑架5转动,两舵机支撑架5之间采用铰链连接。四旋翼装置包括四个向上推进器2,分别对称设置于无人车1的四个角处。
27.激光雷达4用于实现无人车1的避障功能,激光雷达4抓取前方是否存在障碍物并进行判断,每隔一定时间进行360
°
视觉范围内的周边环境点采样,将障碍物以点的形式呈现,向没有障碍物的方向调整角度行驶,当激光雷达4检测到前方路段出现较大落差时,传递信号给所述主控制器,主控制器强制命令电机反转,无人车1减速并按原路倒退,旋转一定角度后继续向前行驶。舵机侧面搭载一红外线传感器,当检测到与周边物体距离过近时,红外线传感器将会发送信号给主控制器,主控制器接收信号并做出方向调整,避免发生边缘碰撞。
28.摄像头3位于无人车1上方的尾部,方向朝后,摄像头3采集当前的地形信息,并将采集的数据传输给主控制器,并设定相应的图像识别算法,进行处理后得到三维建模后的信息。
29.无人车1内部装有一陀螺仪,该陀螺仪能够检测无人车各个方位的加速度,和无人车所处的状态,当检测到无人车处于失重状态时,陀螺仪传递信号给主控制器,主控制器发送命令给所述四旋翼装置,该四旋翼装置转动启动工作。四旋翼装置针对无人车1的失重情况,如陷入泥浆、遇到小坑过程时,四旋翼装置工作,给无人车1提供升力,平衡一定的重力,减小与所接触路面之间的摩擦,由此使得无人车1脱离当前环境,当陀螺仪检测到无人车1加速度不再发生变化时,主控制器控制四旋翼装置停止工作。
30.三角警示牌8的底部设有一控制底座10,三角警示牌8紧贴一显示屏7,该显示屏7的左右两侧分别设有一反光布条9。反光布条9便于夜间的警示工作,三角警示牌8展开并发光,起到警示的作用。
31.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1