机器人底盘及机器人的制作方法
1.本申请涉及机器人技术领域,特别涉及一种机器人底盘及机器人。
背景技术:
2.随着科技发展,机器人正逐步应用于各种民事、军事以及工业生产等各个领域,例如园区巡逻、最后一公里快递配送、餐厅送餐等场景。
3.机器人底盘是控制机器人运动的关键部分,对机器人的通过性、稳定性、安全性有着重要影响。底盘性能的其中一个重要指标为主动轮着地性能,特别对于双轮差速类底盘,由于机器人的前进、后退、转弯及原地旋转等动作都要靠两个主动轮配合运行才能实现,若一个主动轮离地,将失去动力。故对于双轮差速类底盘,如何提高主动轮着地性能,以及增加其着地正压力,使得主动轮不易打滑,是一个非常重要的技术难点。底盘性能的另一个重要指标为底盘的减震性能,目前市场上的双轮差速类底盘通场只考虑了主动轮的减震设计,从动轮通常不具备减震性能,在机器人通过不平整路面时,机器人稳定性较差。
4.因此,本申请致力于设计一种机器人底盘及机器人,通过合理的结构设计,该机器人底盘及机器人在不同负载下,主动轮对地正压力随着负载的变化而变化,提高了主动轮着地性能,能有效防止主动轮打滑现象,同时,该底盘及机器人的主动轮、从动轮都具备减震性能,机器人底盘及机器人平稳性好。
技术实现要素:
5.本申请的目的是提供一种机器人底盘及机器人,所述机器人底盘及机器人的主动轮具备较好的着地性能,同时主动轮、从动轮都具备减震效果,机器人底盘及机器人具备较好的通过性、稳定性。
6.为了实现上述目的,本申请提供如下技术方案:
7.一种机器人底盘,包括:底盘车架、前排行走系统、后排行走系统。其中,前排行走系统包括:一对前排从动轮,与所述前排从动轮一一对应的前排悬架组件。所述前排从动轮、前排悬架组件分别对称布置在底盘车架的两侧。所述前排悬架组件包括:前排从动轮支架、前排悬架连杆、前排减震组件、前排铰接组件。所述前排减震组件包括:前排减震器上支架、前排减震器、前排减震器下支架。所述前排铰接组件包括:前排铰接上支架、前排铰接下支架。后排行走系统包括:一对主动轮,与所述主动轮一一对应的后排悬架组件,与所述主动轮一一对应的后排从动轮。所述主动轮、后排悬架组件、后排从动轮分别对称布置在底盘车架的两侧。所述后排悬架组件包括:主动轮支架、后排悬架连杆、后排减震组件、后排铰接组件、后排从动轮支架。所述后排减震组件包括:后排减震器上支架、后排减震器、后排减震器下支架。所述后排铰接组件包括:后排铰接上支架、后排铰接下支架。
8.进一步地,所述前排从动轮通过前排从动轮支架固定在前排悬架连杆的一端,所述前排悬架连杆的另一端通过前排铰接组件与底盘车架铰接。所述前排从动轮与所述前排从动轮支架通过螺栓固定。所述前排铰接上支架焊接在前排悬架连杆上,所述前排铰接下
支架焊接在底盘车架上,所述前排铰接上支架与前排铰接下支架通过螺栓铰接。
9.进一步地,为了提高前排行走系统的稳定性,每个前排悬架连杆与底盘车架之间设置有两个前排铰接组件。
10.进一步地,所述前排悬架连杆与底盘车架之间设置有前排减震组件。所述前排减震器的一端通过前排减震器上支架铰接在前排悬架连杆上,另一端通过前排减震器下支架铰接在底盘车架上。所述前排减震器上支架焊接在前排悬架连杆上,所述前排减震器下支架焊接在底盘车架上。
11.进一步地,所述主动轮通过主动轮支架固定在后排悬架连杆的一端,所述后排悬架连杆的另一端通过后排从动轮支架设置有后排从动轮。所述主动轮设置于所述前排从动轮与后排从动轮之间。所述后排从动轮与所述后排从动轮支架通过螺栓固定。
12.进一步地,所述后排悬架连杆与底盘车架之间设置有后排减震组件。所述后排减震器的一端通过后排减震器上支架铰接在后排悬架连杆上,另一端通过后排减震器下支架铰接在底盘车架上。所述后排减震器上支架焊接在后排悬架连杆上,所述后排减震器下支架焊接在底盘车架上。
13.进一步地,所述后排悬架连杆与底盘车架设置有后排铰接组件。所述后排铰接上支架焊接在后排悬架连杆上,所述后排铰接下支架焊接在底盘车架上,所述后排铰接上支架与后排铰接下支架通过螺栓铰接。
14.进一步地,为了提高后排行走系统的稳定性,每个后排悬架连杆与底盘车架之间设置有两个后排铰接组件。
15.进一步地,所述前排从动轮、后排从动轮都采用万向轮。
16.另外,本申请还提供一种机器人,包括上述提供的机器人底盘。
17.本申请提供的机器人底盘及机器人,通过合理的结构设计,该机器人底盘及机器人在不同负载下,主动轮对地正压力随着负载的变化而变化,使主动轮始终与地面保持有效的接触,提高了主动轮着地性能,有效减少主动轮打滑现象的出现,同时,该底盘及机器人的主动轮、从动轮都具备减震性能,机器人底盘及机器人平稳性好。
18.以下将结合附图对本申请的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本申请的目的、特征和效果。
附图说明
19.为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他附图,都属于本申请保护的范围。
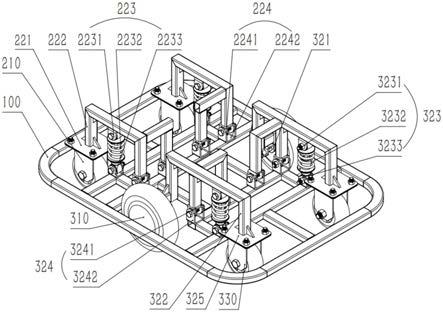
20.图1为本申请实施例提供的机器人底盘立体结构示意图;
21.图2为本申请实施例提供的机器人底盘左视结构示意图;
22.图3为本申请实施例提供的机器人底盘俯视结构示意图;
23.附图标注说明:
24.100
‑
底盘车架;
25.200
‑
前排行走系统,210
‑
前排从动轮,220
‑
前排悬架组件,221
‑
前排从动轮支架,
222
‑
前排悬架连杆(222),223
‑
前排减震组件,224
‑
前排铰接组件,2231
‑
前排减震器上支架,2232
‑
前排减震器,2233
‑
前排减震器下支架,2241
‑
前排铰接上支架,2242
‑
前排铰接下支架。
26.300
‑
后排行走系统,310
‑
主动轮,320
‑
后排悬架组件,330
‑
后排从动轮,321
‑
主动轮支架,322
‑
后排悬架连杆,323
‑
后排减震组件,324
‑
后排铰接组件,325
‑
后排从动轮支架,3231
‑
后排减震器上支架,3232
‑
后排减震器,3233
‑
后排减震器下支架,3241
‑
后排铰接上支架,3242后排铰接下支架。
具体实施方式
27.下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请的一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为本申请及其应用或使用的任何限制。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
28.如图1至图3所示,本申请提供一种机器人底盘,该机器人底盘包括底盘车架100、前排行走系统200、后排行走系统300。其中,前排行走系统200包括:一对前排从动轮210,与所述前排从动轮210一一对应的前排悬架组件220。所述前排从动轮210、前排悬架组件220分别对称布置在底盘车架100的两侧。所述前排悬架组件220包括:前排从动轮支架221、前排悬架连杆222、前排减震组件223、前排铰接组件224。所述前排减震组件223包括:前排减震器上支架2231、前排减震器2232、前排减震器下支架2233。所述前排铰接组件224包括:前排铰接上支架2241、前排铰接下支架2242。所述后排行走系统300包括:一对主动轮310,与所述主动轮310一一对应的后排悬架组件320,与所述主动轮310一一对应的后排从动轮330。所述主动轮310、后排悬架组件320、后排从动轮330分别对称布置在底盘车架100的两侧。所述后排悬架组件320包括:主动轮支架321、后排悬架连杆322、后排减震组件323、后排铰接组件324、后排从动轮支架325。所述后排减震组件323包括:后排减震器上支架3231、后排减震器3232、后排减震器下支架3233。所述后排铰接组件324包括:后排铰接上支架3241、后排铰接下支架3242。
29.进一步地,所述前排从动轮210通过前排从动轮支架221固定在前排悬架连杆222的一端,所述前排悬架连杆222的另一端通过前排铰接组件224与底盘车架100铰接。所述前排铰接上支架2241焊接在前排悬架连杆222上,所述前排铰接下支架2242焊接在底盘车架100上,所述前排铰接上支架2241与前排铰接下支架2242通过螺栓铰接,前排铰接上支架2241与前排铰接下支架2242通过螺栓可以相互转动。
30.进一步地,为了提高前排行走系统200的稳定性,每个前排悬架连杆222与底盘车架100之间设置有两个前排铰接组件224。
31.进一步地,所述前排悬架连杆222与底盘车架100之间设置有前排减震组件223。所述前排减震器2232的一端通过前排减震器上支架2231铰接在前排悬架连杆222上,另一端通过前排减震器下支架2233铰接在底盘车架100上。所述前排减震器上支架2231焊接在前排悬架连杆222上,所述前排减震器下支架2233焊接在底盘车架100上。
32.进一步地,所述主动轮310通过主动轮支架321固定在后排悬架连杆322的一端,所
述后排悬架连杆322的另一端通过后排从动轮支架325设置有后排从动轮330。所述主动轮310设置于所述前排从动轮210与后排从动轮330之间。所述主动轮支架321焊接固定在后排悬架连杆322的一端。所述后排从动轮330与所述后排从动轮支架325通过螺栓固定,所述后排从动轮支架325焊接固定在后排悬架连杆322的一端。
33.进一步地,所述后排悬架连杆322与底盘车架100之间设置有后排减震组件323。所述后排减震器3232的一端通过后排减震器上支架3231铰接在后排悬架连杆322上,另一端通过后排减震器下支架3233铰接在底盘车架100上。所述后排减震器上支架3231焊接在后排悬架连杆322上,所述后排减震器下支架3233焊接在底盘车架100上。
34.进一步地,所述后排悬架连杆322与底盘车架100设置有后排铰接组件324。所述后排铰接上支架3241焊接在后排悬架连杆322上,所述后排铰接下支架3242焊接在底盘车架100上,所述后排铰接上支架3241与后排铰接下支架3242通过螺栓铰接,后排铰接上支架3241与后排铰接下支架3242通过螺栓可以相互转动。
35.进一步地,为了提高后排行走系统300的稳定性,每个后排悬架连杆322与底盘车架100之间设置有两个后排铰接组件324。
36.进一步地,所述前排从动轮210、后排从动轮330设置为万向轮,优选为万向脚轮。
37.结合图2,进一步说明本公开实施例机器人底盘的优点。在底盘车架100上增加负载时,其负载重量会分配到前排从动轮210、主动轮310、后排从动轮330上。主动轮310与后排从动轮330负载重量分配比例与后排铰接组件224与主动轮310和后排从动轮330在竖直方向的距离有关,当确定了后排铰接组件的位置后,主动轮310与后排从动轮330负载重量分配比例固定。因而,主动轮310上分配的负载重量与底盘车架100上增加的负载重量成正比,底盘车架100上增加的负载重量越大,分配到主动轮310上的负载就越大,使主动轮310始终与地面保持有效的接触,提高了主动轮310着地性能,有效减少主动轮打滑现象的出现。同时,该底盘及机器人的前排从动轮210、主动轮310、后排从动轮330与底盘车架之间设置有减震组件,在通过不平整路面时,减震组件可以有效抑制底盘的抖动,提升了底盘的平稳性。
38.另外,本申请还提供一种机器人,该机器人包括上述的机器人底盘。本公开实施例的机器人与本公开实施例的机器人底盘具有相同的优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1