一种机器人柔性足的制作方法
1.本发明涉及仿人机器人领域,尤其涉及一种机器人柔性足。
背景技术:
2.仿人机器人具有适应环境能力强、动作灵活等优点,因此,具有更加广阔的应用和发展前景。
3.仿人机器人要实现高度的灵活性,稳定行走是关键。机器人在行走过程中,地面对机器人的反作用力是影响稳定性的一个重要因素。这就要求机器人的脚底具有顺应地面,并吸收地面冲击的能力。
4.中国专利号cn101402380a发明了一种仿人机器人足部冲击吸收机构,包括脚底板,所述的脚底板上面设有减震柱,所述的减震柱上表面设有压力板,所述的上压板上面设有力传感器和上盖板,所述的上盖板通过四个上盖板安装孔与脚底板相连,在上盖板与脚底板之间设有四组调节垫圈,所述的力传感器与机器人腿部相连。所述的减震柱为四个,所述的四个减震柱通过位于脚底板的前段设有脚底前缘斜面,其后端设有脚底后缘斜面,所述的脚底板下面设有防滑减震垫,可实现冲击吸收机构柔性的连续可调。该机构保证了在垂直方向上的减震,但是结构复杂,易产生脚底圆筒与上压板之间卡死。
技术实现要素:
5.针对现有技术的不足,本发明提出一种机器人柔性足。
6.为了实现上述发明目的,本发明采用了以下技术方案:一种机器人柔性足,包括依次首尾相连的踝、足面、第一连接杆、足底和第二连接杆;所述机器人柔性足各部件间形成个连接处,所述个连接处为两处固定连接和三处转动连接。
7.进一步地,所述足面、第一连接杆、足底和第二连接杆中至少有一个为弹性件;所述弹性件与其一端相邻部件固定连接。
8.进一步地,所述足面、第一连接杆、足底和第二连接杆中至少有一个为刚性板;所述刚性板与其一端相邻部件转动连接。
9.进一步地,所述踝设有驱动部,所述驱动部与驱动装置连接。
10.进一步地,所述驱动装置驱动机器人柔性足绕在足部运动副约束下运动。
11.进一步地,所述的足部运动副为踝转动副时,所述驱动装置为一组,通过驱动部的轴孔与踝连接。
12.进一步地,所述的足部运动副为踝球副或十字轴时,所述驱动装置为两组,每组驱动装置均包括驱动单元和与其连接的传动单元;所述传动单元与驱动部通过鱼眼接头或球副连接。
13.进一步地,所述驱动单元为电机,所述传动单元为连杆机构。
14.与现有技术相比,采用了上述技术方案的一种机器人柔性足,具有如下有益效果:
15.1、采用本发明的一种机器人柔性足,结构简洁,加工成本低,易于实现;
16.2、采用本发明的一种机器人柔性足,可以简化为平面四杆机构,且对原材料要求不高,各零件参数易得到,方便机器人的运动学建模和动力学仿真;
17.3、采用本发明的一种机器人柔性足,机器人弹性足触地的冲击有两条传递路径,一条通过第二连接杆,由于转动副的存在,冲击力不能传递到踝,另一条通过弹性板或弹性转动副吸收,可见,本发明所述的机器人弹性足可以较好达到保护驱动装置的效果。
附图说明
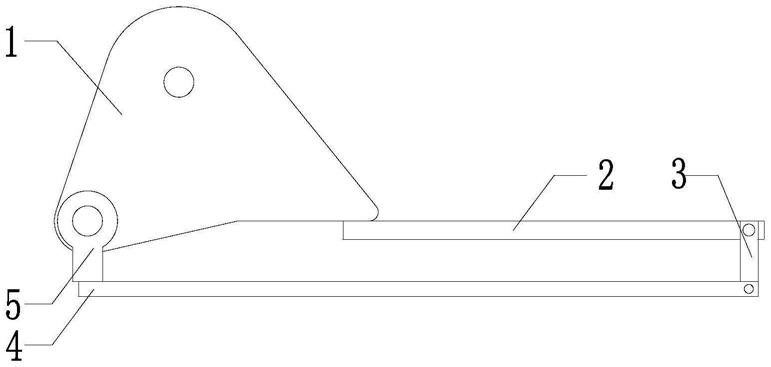
18.图1为本发明一种机器人柔性足的结构示意图;
19.图2为本发明机器人柔性足的一组驱动装置的结构示意图;
20.图3为本发明机器人柔性足的两组驱动装置的结构示意图;
21.附图标记:1、踝;2、足面;3、第一连接杆;4、足底;5、第二连接杆;6、驱动装置;7、腿;101、足部运动副;102驱动部。
具体实施方式
22.下面结合实施例和附图对本发明做进一步描述。
23.本发明公开了一种机器人柔性足,包括首尾相连的踝1、足面2、第一连接杆3、足底4和第二连接杆5。所述机器人柔性足各部件(踝1和足面2,足面2和第一连接杆3,第一连接杆3和足底4,足底4和第二连接杆5,第二连接杆5和踝1)间形成5个连接处,所述5个连接处包括两处固定连接和三处转动连接。其中一处固定连接用于弹性板。所述足面2、第一连接部3、足底4和第二连接部5中至少有一个为弹性件。
24.所述踝1上设有驱动部102。所述驱动部102为轴或轴孔与驱动装置6连接。通过驱动装置驱动驱动部102使机器人柔性足绕足部运动副运动,所述的驱动装置用于驱动所述柔性足在足部运动副约束下运动
25.如图2所示,所述的足部运动副101为踝转动副,则机器人的腿部或髋部设置有一组驱动装置6,当驱动装置设于机器人小腿7上并与所述踝转动副同轴布置时,驱动装置直接驱动踝运动;当驱动装置与踝转动副不同轴布置时,驱动装置则通过连杆等传动机构驱动踝运动。
26.如图3所示,所述的足部运动副为踝球副或十字轴8,所述的驱动装置6有两组,每组驱动装置均包括驱动单元和与其连接的传动单元。所述驱动单位为电机。所述传动单元为连杆,与驱动部102通过鱼眼接头或球副连接,实现机器人柔性足的二自由度运动。
27.实施例一
28.如图1所示的一种机器人柔性足,包括依次首尾相连的踝1,足面2,第一连接杆3,足底4,第二连接杆5。所述的足面2为弹性板,一端固定连接所述踝1,另一端与第一连接杆3转动连接;所述足底4一端与第一连接杆3转动连接,足底4另一端与第二连接杆5一端固定连接,所述第二连接杆5与踝1转动连接。
29.实施例二
30.基于实施例一,所述的足面2为弹性板,将足面2与第一连接部3的转动连接改为固定连接。需要指出的是,弹性板无论是固定连接还是转动连接,其连接处均相当于一个转动连接,这样,本方案的三个转动副可以减到两个转动副,被减掉的那个转动副改为固定连
接。
31.实施例三
32.基于实施例一,将所述的弹性板替换为刚性板,即所述足面2采用刚性板。所述足面2的一端通过扭簧转动连接所述踝1,所述足面2的另一端与第一连接杆3转动连接,第一连接杆3与足底4一端转动连接,足底4另一端与第二连接杆5一端固定连接,第二连接杆5与踝1转动连接。
33.以上所述是本发明的优选实施方式,对于本领域的普通技术人员来说不脱离本发明原理的前提下,还可以做出若干变型和改进,这些也应视为本发明的保护范围。
技术特征:
1.一种机器人柔性足,其特征在于:包括依次首尾相连的踝(1)、足面(2)、第一连接杆(3)、足底(4)和第二连接杆(5);所述机器人柔性足各部件间形成5个连接处,所述5个连接处为两处固定连接和三处转动连接。2.根据权利要求1所述的机器人柔性足,其特征在于,所述足面(2)、第一连接杆(3)、足底(4)和第二连接杆(5)中至少有一个为弹性件;所述弹性件与其一端相邻部件固定连接。3.根据权利要求1所述的机器人柔性足,其特征在于,所述足面(2)、第一连接杆(3)、足底(4)和第二连接杆(5)中至少有一个为刚性板;所述刚性板与其一端相邻部件转动连接。4.根据权利要求1所述的机器人柔性足,其特征在于,所述踝(1)设有驱动部(102),所述驱动部(102)与驱动装置(6)连接。5.根据权利要求1所述的机器人柔性足,其特征在于,所述驱动装置(6)驱动机器人柔性足绕在足部运动副(101)约束下运动。6.根据权利要求1所述的机器人柔性足,其特征在于,所述的足部运动副(101)为踝转动副时,所述驱动装置(6)为一组,通过驱动部(102)的轴孔与踝(1)连接。7.根据权利要求1所述的机器人柔性足,其特征在于,所述的足部运动副(101)为踝球副或十字轴时,所述驱动装置(6)为两组,每组驱动装置均包括驱动单元和与其连接的传动单元;所述传动单元与驱动部(102)通过鱼眼接头或球副连接。8.根据权利要求7所述的机器人柔性足,其特征在于,所述驱动单元为电机,所述传动单元为连杆机构。
技术总结
本发明公开了一种机器人柔性足,解决了机器人足部刚性触地的问题,所述机器人柔性足包括踝、足面、足底、第一连接部、第二连接部和驱动装置;所述踝设有足部运动副和驱动部;所述踝、足面、第一连接部、足底、第二连接部依次首尾相连,且足面、第一连接部、足底、第二连接部中至少有一个为弹性板,其中弹性板与其一端相邻部件固定连接,使柔性足构成平面四杆机构,所述驱动装置通过作用于驱动部驱动柔性足绕足部运动副运动,达到了机器人足部弹性触地来减小对踝部电机冲击的目的。减小对踝部电机冲击的目的。减小对踝部电机冲击的目的。
技术研发人员:陈令凯 张兰 谢也 孔令雨 黄冠宇 谢安桓 张丹
受保护的技术使用者:之江实验室
技术研发日:2021.12.21
技术公布日:2022/5/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1