用于无人直升机的拖车的制作方法
1.本实用新型涉及无人直升机移动技术领域,特别是涉及一种用于无人直升机的拖车。
背景技术:
2.无人直升机在研发初期,有装配、测试和其他必不可少的调试需求,后期有检查维修、更换易损耗件和其他零部件的需求,在这些阶段中,都需要对无人直升机进行移动,因无人直升机的重量较大,导致其在移动时比较困难,耗费人力,劳动强度大。
3.有鉴于此,如何设计一种拖车,方便对无人直升机进行移动,是本领域技术人员目前需要解决的技术问题。
技术实现要素:
4.本实用新型的目的是提供一种用于无人直升机的拖车,该拖车方便移动无人直升机,能够满足研发前期调试的移动需求以及后期检修的移动需求。
5.为解决上述技术问题,本实用新型提供一种用于无人直升机的拖车,包括车主体、支撑部件、驱动部件和车轮;所述支撑部件和所述驱动部件均安装于所述车主体,所述驱动部件用于驱动所述支撑部件竖直升降,所述支撑部件具有用以支撑所述无人直升机的机架的支撑结构;所述车主体的底部安装有若干所述车轮。
6.该实用新型提供的拖车用于无人直升机,在车主体上安装有支撑部件和驱动支撑部件竖向升降的驱动部件,支撑部件具有用以支撑无人直升机的机架的支撑结构;实际应用时,先控制支撑部件处于低位状态,将拖车的车主体推入无人直升机的机架下方,调整好两者的相对位置,控制驱动部件带动支撑部件竖向上升以利用其支撑机构对机架进行支撑,并带动机架及整个无人直升机竖向上升,控制好机架的离地高度后,利于车主体的底部的车轮可以使装有无人直升机的拖车移动至需要的位置;如此,在无人直升机的研发初期阶段和后期维护阶段,利用该拖车可以实现无人直升机的移动,方便研发初期调试的移动需求和后期检修的需求。
7.如上所述的拖车,所述支撑部件包括两个支撑板,两个所述支撑板分别位于所述车主体的前端和后端,所述支撑板的长度方向与所述车主体的前后方向垂直;每个所述支撑板上固设有至少一个固定块,所述固定块具有与所述机架的主管配合的卡槽;所述支撑结构包括所述卡槽。
8.如上所述的拖车,所述卡槽包括第一槽部和第二槽部,所述第二槽部位于所述第一槽部的下方,所述第一槽部的两个相对的槽壁之间的距离相同,所述第二槽部的两个相对的槽壁之间的距离自上至下逐渐减小。
9.如上所述的拖车,所述支撑板和所述车主体之间设有至少一个导向部件,所述导向部件包括滑套和滑杆,所述滑套和所述滑杆中的一者固设于所述车主体,另一者固设于所述支撑板,所述滑杆滑动插装于所述滑套,且能够相对所述滑套竖向移动。
10.如上所述的拖车,所述支撑板固设有两个所述固定块,两个所述固定块分别位于所述支撑板的两端部;所述支撑板与所述车主体之间设有两个所述导向部件,两个所述导向部件也分别位于所述支撑板的两端部;所述驱动部件驱动所述支撑板的作用点位于所述支撑板的中部。
11.如上所述的拖车,所述驱动部件包括驱动部和伸缩部,所述伸缩部与所述支撑部件固接,所述驱动部用于驱动所述伸缩部竖向升降。
12.如上所述的拖车,所述驱动部件包括液压千斤顶,所述液压千斤顶的活塞为所述伸缩部,所述驱动部件还包括液压油箱,所述液压油箱用于为所述液压千斤顶提供动力;所述液压油箱安装于所述车主体。
13.如上所述的拖车,所述车主体为管件拼装焊接形成的长方体框架结构。
14.如上所述的拖车,所述车主体底部前端的两侧分别设有至少一个所述车轮,所述车主体底部后端的两侧分别设有至少一个所述车轮;位于所述车主体前端的所述车轮为万向福马轮,位于所述车主体后端的所述车轮为定向福马轮。
15.如上所述的拖车,所述车主体前端固设有连接座,还包括拉杆,所述拉杆与所述连接座转动连接,其转动中心线与水平方向平行,且与所述车主体的前后方向垂直。
附图说明
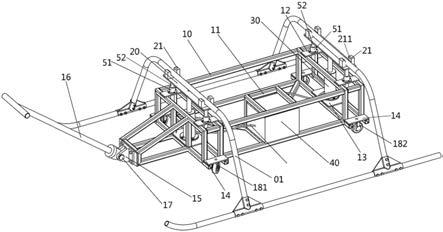
16.图1为本实用新型所提供装载有无人直升机机架的拖车的一种具体实施例的结构示意图;
17.图2为图1的主视图;
18.图3为图2的俯视图;
19.图4为图2的右视图。
20.附图标记说明:
21.车主体10,固定架11,固定板12,安装板13,轮板14,连接座15,拉杆16,连接销17,前车轮181,后车轮182;
22.支撑板20,固定块21,卡槽211;
23.液压千斤顶30,液压油箱40,滑套51,滑杆52;
24.机架01。
具体实施方式
25.为了使本技术领域的人员更好地理解本实用新型方案,下面结合附图和具体实施方式对本实用新型作进一步的详细说明。
26.请参考图1至图4,图1为本实用新型所提供装载有无人直升机机架的拖车的一种具体实施例的结构示意图;图2为图1的主视图;图3为图2的俯视图;图4为图2的右视图。
27.该实施例提供的拖车用于无人直升机的移动,这里的无人直升机可以为不同的类型,比如可以为交叉双旋翼无人直升机,也可以为其他类型的无人直升机。
28.图中均以一种交叉双旋翼无人直升机的机架01为例说明该拖车的具体结构形式,可以理解,在无人直升机的类型不同,其机架结构相应变化的基础上,该拖车的相关结构也适应性变化。
29.如图所示,该实施例提供的拖车包括车主体10、支撑部件、驱动部件和车轮;支撑部件和驱动部件均安装于车主体10,驱动部件用于驱动支撑部件竖直升降,支撑部件具有用以支撑无人直升机的机架01的支撑结构;车主体10的底部安装有若干车轮。
30.该拖车在实际应用时,先控制支撑部件处于低位状态,将拖车的车主体10推入无人直升机的机架01下方,这里的低位指的是拖车的车主体10与机架01不干涉的位置,调整好车主体10和机架01的相对位置,控制驱动部件带动支撑部件竖向上升以利用其支撑机构对机架01进行支撑,并带动机架01及整个无人直升机竖向上升,控制好机架01的离地高度后,利于车主体10的底部的车轮可以使装有无人直升机的拖车移动至需要的位置;如此,在无人直升机的研发初期阶段和后期维护阶段,利用该拖车可以实现无人直升机的移动,方便研发初期调试的移动需求和后期检修的需求。
31.图示方案中,无人直升机的机架01包括前后两个平行布置的主管结构。
32.具体的方案中,拖车的车主体10为管件拼装焊接形成的长方体框架结构,在确保承重力的基础上,可以节省材料,减轻重量,方便操作。
33.在图示机架01结构的基础上,为了实现对机架01的稳定可靠地支撑,支撑部件具体包括两个支撑板20,两个支撑板20分别位于车主体10的前端和后端,以图示方位,图中左侧为前,右侧为后,在车主体10设为长方体结构的基础上,其长度方向即为前后方向;该方案中,支撑板20的长度方向与车主体10的前后方向垂直,即支撑板20沿车主体10的宽度方向延伸。
34.每个支撑板20上固设有至少一个固定块21,固定块21具有与机架01的主管配合的卡槽211,前述支撑结构包括卡槽211。
35.显然,前后两个支撑板20的卡槽211之间的距离与机架01的前后主管之间的距离一致,如此,机架01的两个主管才能被前后两个支撑板20上的固定块21支撑。
36.具体的,每个支撑板20上设有两个固定块21,两个固定块21分别位于支撑板20的两端部,这样,机架01的一个主管具有两个支撑位置,对机架01的支撑更稳定可靠,避免移动过程中发生意外倾覆等不良状况。
37.具体的,固定块21的卡槽211包括第一槽部和第二槽部,其中是,第二槽部位于第一槽部的下方,第一槽部的两个相对的槽壁之间的距离相同,第二槽部的两个相对的槽壁之间的距离自上至下逐渐减小,实际设置时,第二槽部可以设为v形结构,这样,在实际操作时,方便利用第二槽部的倾斜槽壁使机架01的主管自对中,且能够限制机架01的位置。
38.具体的方案中,支撑板21和车主体10之间还设有至少一个导向部件,该导向部件包括滑套51和滑杆52,滑套51和滑杆52中的一者固设于车主体10,另一者固设于支撑板20,滑杆52滑动插装于滑套51,且能够相对滑套51竖向移动。
39.图示方案中,滑套51固定在车主体10上,滑杆52固定在支撑板20上,在车主体10的对应位置上固接固定板12,滑套51固定在固定板12上。
40.可以理解,实际设置时,也可将滑套51固定在支撑板20上,将滑杆52固定在车主体10上。
41.具体地,每个支撑板21与车主体10之间设有两个导向部件,以提高导向的可靠性。具体地,两个导向部件位于支撑板21的两端部。
42.在上述基础上,驱动部件驱动支撑板20升降的作用点可位于支撑板20的中部,以
确保支撑板20竖向升降的可靠性和稳定性。
43.该实施例中,驱动部件包括驱动部和伸缩部,其中,伸缩部与支撑板20固接,驱动部用于驱动伸缩部竖直升降以带动支撑板20竖向升降。
44.该具体方案中,驱动部件具体包括液压千斤顶30,液压千斤顶30的活塞为前述伸缩部,与支撑板20固接,具体可以通过螺栓等紧固件实现两者的连接。
45.由于车主体10为框架结构,为方便液压千斤顶30的安装,可以在车主体10的相应位置固接安装板13,以作为液压千斤顶30的承载部件。
46.具体地,每个支撑板20都对应设有一个液压千斤顶30,该驱动部件还包括液压油箱40,液压油箱40用于为两个液压千斤顶30提供动力,显然,液压油箱40也安装于车主体10,为平衡拖车的重量,液压油箱40具体通过固定架11固定在车主体10的中部位置,也即两个液压千斤顶30之间。
47.在实际设置时,驱动部件也可以设为其他结构形式,比如气缸或者电动推杆等具有伸缩移动功能的部件,当然也可以利用具有伸缩移动功能的传动部件结合驱动部来实现支撑部件的竖向升降。
48.该实施例中,在车主体10设为前述长方形框架的基础上,可以在其底部前端两侧分别设置至少一个车轮,称之为前车轮181,在其底部后端两侧分别设置至少一个车轮,称之为后车轮182;在车主体10的对应位置固接轮板14,以方便车轮的安装。
49.具体设置时,前车轮181采用万向福马轮,方便转向操作,后车轮182采用定向福马轮,方便移动操作。
50.该实施例中,在车主体10的前端还安装有拉杆16,以便于人员操作,通过拉杆16拉动车主体10移动。
51.具体地,在车主体10前端固设有连接座15,拉杆16与连接座15转动连接,其转动中心线与水平方向平行,且与车主体10的前后方向垂直,以使得拉杆16可以向上或向下转动,便于操作。
52.以上对本实用新型所提供的用于无人直升机的拖车进行了详细介绍。本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1