一种具有清扫和转运功能的机械运输装置的制作方法
1.本技术涉及转运装置技术领域,具体而言,涉及一种具有清扫和转运功能的机械运输装置。
背景技术:
2.在煤矿实验中,需要对煤矿采集的样品进行转移,但是,现有的实验室中的转运操作,基本上都是采用人工进行,这样会对实验室人员造成巨大的劳动力负担,并且不便于进行转运,以及在实验室内,需要对地面进行清理,且清理面积十分的巨大,容易造成巨大的工作负担,这样就需要一种转运机器人,即能够在实现对煤矿采集的样品进行转运的同时,实现对地面进行清理,提高工作效率。
技术实现要素:
3.为了弥补以上不足,本技术提供了一种具有清扫和转运功能的机械运输装置,旨在改善现有的实验室采集样品转运的时候,采用大量的人员进行,十分的不便,并且不能够实现对实验室内部进行清理,造成工作量巨大。
4.本技术实施例提供了一种具有清扫和转运功能的机械运输装置,包括
5.清理机构,所述清理机构包括清洗壳体,所述清洗壳体的底部一端固定安装有吸尘板,所述吸尘板的一侧设有扫地板,所述清洗壳体的底部另一端固定设有吸水板,所述吸水板的一侧设有拖地板,所述清洗壳体的内部两端设有吸尘盒和吸水盒,所述吸尘盒和所述吸尘板、所述吸水盒和所述吸水板相应对称设置,所述清洗壳体的内部中间固定安装有气压尘箱,所述气压尘箱上设有气压泵,所述气压泵通过连通管与所述气压尘箱固定连通,所述气压尘箱通过尘管分别与所述吸尘盒和所述吸水盒连通,所述气压尘箱的一侧固定安装有储水箱,所述储水箱上连通有水泵,所述水泵通过输水管与所述拖地板连通;
6.转运机构,所述转运机构包括有两个侧板,两个所述侧板的顶端共同固定连接有顶板,所述转运机构还包括第一伺服电机,所述第一伺服电机的输出端固定连接有第一丝杆,所述第一丝杆上螺纹连接有螺纹连接板,所述螺纹连接板上固定安装有固定板,所述固定板的底部固定安装有第一伺服电缸,所述第一伺服电缸的输出端贯穿所述固定板固定连接有接料板,两个所述侧板之间活动连接有挡板,所述挡板的一侧焊接有支撑板,所述支撑板上固定安装有第二伺服电缸,所述第二伺服电缸的输出端连接有推板;
7.存储机构,所述存储机构包括框架,所述框架的内部设有若干隔板。
8.在上述实现过程中,本发明在清洗壳体的内部设有气压尘箱和气压泵可以实现对灰尘、杂物和水渍进行抽取,以及设有扫地板可以实现对灰尘和杂物进行聚集,便于进行真空抽取,以及设有储水箱和水泵,且水泵抽取水输送到拖地板上,实现对地面进行拖洗,有效的实现对地面进行清理灰尘和拖洗操作;以及设有转运机构,通过第一伺服电缸实现对接料板进行升降调节,便于实现与传输装置进行接触,实现对采集样品进行接收,且挡板可以防止采集样品洒落,并且通过第一伺服电机和第一丝杆实现对接料板进行移动,且通过
第二伺服电缸和推板将采集样品输送到存储机构上的隔板上进行存储,便于实现对采集样品进行接收和存储,且便于进行调节,适用性广泛。
9.在一种具体的实施方案中,所述清洗壳体的顶部铰接有顶盖,所述转运机构和所述存储机构螺栓安装在所述顶盖的上部。
10.在上述实现过程中,顶盖的铰接设定,便于实现对清洗壳体内部的设备进行维修、更换和处理等,且转运机构和存储机构通过螺栓安装便于进行安装和拆卸。
11.在一种具体的实施方案中,所述顶盖的上部一端两侧固定安装有卡合座,两侧所述侧板卡合连接在两侧所述卡合座的内部,两侧所述侧板通过固定螺栓固定连接所述卡合座。
12.在上述实现过程中,卡合座的设定可以使得侧板便于进行组合安装,稳定的固定安装,便于进行安装和拆卸。
13.在一种具体的实施方案中,两侧所述侧板的一端均开设有滑动槽,所述挡板滑动处于所述滑动槽的内部,所述挡板的两侧分别固定连接有螺纹连接块和滑杆连接块,一侧所述侧板上固定安装有第二伺服电机,所述第二伺服电机的输出端连接有第二丝杆,所述第二丝杆的端部活动连接有第一轴承座,所述第一轴承座固定安装有在所述侧板上,所述螺纹连接块螺纹连接在所述第二丝杆上,另一侧所述侧板一侧通过定位块连接有滑杆,所述滑杆连接块滑动连接在所述滑杆上。
14.在上述实现过程中,滑动槽的设定可以使得挡板便于进行升降调节,以及设有第二伺服电机和第二丝杆,可以实现对挡板进行升降调节,且另一侧的滑杆的设定可以保持挡板在升降调节时候的稳定性。
15.在一种具体的实施方案中,所述第一伺服电缸设有四个,四组所述第一伺服电缸分别设置在所述螺纹连接板的两侧,所述接料板的两侧分别固定安装有限位板。
16.在上述实现过程中,第一伺服电缸的设定可以实现对接料板的进行高度调节,便于实现对采集样品进行接收,且设有四个第一伺服电缸的设定可以保持接料板的稳定性,且限位板的设定可以防止采集样品发生洒落。
17.在一种具体的实施方案中,所述第一丝杆的端部活动连接有第二轴承座,所述第二轴承座固定安装在所述顶盖上,所述第二轴承座处于所述存储机构的下部。
18.在上述实现过程中,第二轴承座的设定可以使得第一丝杆能够保持平衡稳定的转动,且处于存储机构的下部,便于实现移动将采集样品进行存放在存储机构的内部。
19.在一种具体的实施方案中,所述框架的内部设有三组所述隔板,所述框架的一端铰接有柜门,所述柜门上固定安装有把手。
20.在上述实现过程中,三组隔板的设定可以实现对采集样品进行存放,并且柜门的设定便于打开,实现对采集样品进行取出。
21.在一种具体的实施方案中,所述清洗壳体的内部一端设有第三伺服电缸,所述第三伺服电缸的输出端连接所述扫地板,所述清洗壳体的内部另一端设有第四伺服电缸,所述第四伺服电缸的输出端连接所述拖地板,所述扫地板和所述拖地板上均设有伸缩杆,所述伸缩杆的上端固定连接在所述清洗壳体的底端。
22.在上述实现过程中,第三伺服电机的设定可以实现对扫地板的高度进行调节,第四伺服电机的设定可以实现对拖地板的高度进行调节,并且伸缩杆的设定既能够实现升降
调节,也能够实现保持稳定平衡。
23.在一种具体的实施方案中,所述清洗壳体的底部四角处分别固定安装有动力滚轮。
24.在上述实现过程中,动力滚轮的设定可以有效的实现对机器人进行运动,便于进行移动调节,实现对采集样品进行转运。
25.在一种具体的实施方案中,所述清洗壳体的内部还固定安装有电池组,所述清洗壳体的内部还固定安装有动力电机,所述动力电机与所述动力滚轮传动连接,所述电池组与所有的电力设备电性连接。
26.在上述实现过程中,通过电池组实现对装置中的所有电力设备进行供电运行,并且实现对对机器人进行动力输出,使得机器人能够运动。
附图说明
27.为了更清楚地说明本技术实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
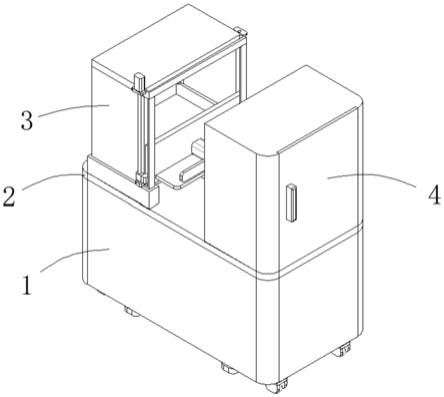
28.图1是本技术实施方式提供的主视结构示意图;
29.图2为本技术实施方式提供的清洗机构侧面结构示意图;
30.图3为本技术实施方式提供的清洗机构俯视结构示意图;
31.图4为本技术实施方式提供的转运机构的结构示意图之一;
32.图5为本技术实施方式提供的转运机构的结构示意图之二;
33.图6为本技术实施方式提供的转运机构的结构示意图之三;
34.图7为本技术实施方式提供的存储机构的结构示意图之一;
35.图8为本技术实施方式提供的存储机构的结构示意图之二。
36.图中:1、清理机构;101、清洗壳体;102、吸尘板;103、扫地板;104、拖地板;105、吸水板;106、吸尘盒;107、第三伺服电缸;108、尘管;109、吸水盒;110、气压尘箱;111、气压泵;112、储水箱;113、水泵;114、输水管;115、第四伺服电缸;116、连通管;117、伸缩杆;118、动力滚轮;2、顶盖;3、转运机构;301、卡合座;302、侧板;303、顶板;304、第一伺服电机;305、螺纹连接板;306、固定板;307、第一伺服电缸;308、接料板;309、挡板;310、第一丝杆;311、支撑板;312、第二伺服电缸;313、推板;314、第二伺服电机;315、第二丝杆;316、螺纹连接块;317、第一轴承座;318、限位板;319、第二轴承座;320、滑杆;321、滑杆连接块;322、定位块;323、滑动槽;4、存储机构;401、框架;402、隔板;403、柜门;404、把手。
具体实施方式
37.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
38.为使本技术实施方式的目的、技术方案和优点更加清楚,下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术
保护的范围。
39.因此,以下对在附图中提供的本技术的实施方式的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施方式。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。
40.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
41.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
42.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
43.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
44.在本技术中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
45.请参阅图1,本技术提供一种具有清扫和转运功能的机械运输装置,包括清理机构1、转运机构3和存储机构4,
46.参考图2-3,所述清理机构1包括清洗壳体101,所述清洗壳体101的底部一端固定安装有吸尘板102,所述吸尘板102的一侧设有扫地板103,所述清洗壳体101的底部另一端固定设有吸水板105,所述吸水板105的一侧设有拖地板104,所述清洗壳体101的内部两端设有吸尘盒106和吸水盒109,所述吸尘盒106和所述吸尘板102、所述吸水盒109和所述吸水板105相应对称设置,所述清洗壳体101的内部中间固定安装有气压尘箱110,所述气压尘箱110上设有气压泵111,所述气压泵111通过连通管116与所述气压尘箱110固定连通,所述气压尘箱110通过尘管108分别与所述吸尘盒106和所述吸水盒109连通,所述气压尘箱110的一侧固定安装有储水箱112,所述储水箱112上连通有水泵113,所述水泵113通过输水管114与所述拖地板104连通;
47.参考图4-6,所述转运机构3包括有两个侧板302,两个所述侧板302的顶端共同固
定连接有顶板303,所述转运机构3还包括第一伺服电机304,所述第一伺服电机304的输出端固定连接有第一丝杆310,所述第一丝杆310上螺纹连接有螺纹连接板305,所述螺纹连接板305上固定安装有固定板306,所述固定板306的底部固定安装有第一伺服电缸307,所述第一伺服电缸307的输出端贯穿所述固定板306固定连接有接料板308,两个所述侧板302之间活动连接有挡板309,所述挡板309的一侧焊接有支撑板311,所述支撑板311上固定安装有第二伺服电缸312,所述第二伺服电缸312的输出端连接有推板313;
48.参考图7-8,所述存储机构4包括框架401,所述框架401的内部设有若干隔板402。
49.在上述实现过程中,本发明在清洗壳体101的内部设有气压尘箱110和气压泵111可以实现对灰尘、杂物和水渍进行抽取,以及设有扫地板103可以实现对灰尘和杂物进行聚集,便于进行真空抽取,以及设有储水箱112和水泵113,且水泵113抽取水输送到拖地板104上,实现对地面进行拖洗,有效的实现对地面进行清理灰尘和拖洗操作;以及设有转运机构3,通过第一伺服电缸307实现对接料板308进行升降调节,便于实现与传输装置进行接触,实现对采集样品进行接收,且挡板309可以防止采集样品洒落,并且通过第一伺服电机304和第一丝杆310实现对接料板308进行移动,且通过第二伺服电缸312和推板313将采集样品输送到存储机构4上的隔板402上进行存储,便于实现对采集样品进行接收和存储,且便于进行调节,适用性广泛。
50.在本实施例中,所述清洗壳体101的顶部铰接有顶盖2,所述转运机构3和所述存储机构4螺栓安装在所述顶盖2的上部,顶盖2的铰接设定,便于实现对清洗壳体101内部的设备进行维修、更换和处理等,且转运机构3和存储机构4通过螺栓安装便于进行安装和拆卸。所述顶盖2的上部一端两侧固定安装有卡合座301,两侧所述侧板302卡合连接在两侧所述卡合座301的内部,两侧所述侧板302通过固定螺栓固定连接所述卡合座301,卡合座301的设定可以使得侧板302便于进行组合安装,稳定的固定安装,便于进行安装和拆卸
51.在本技术文件中,两侧所述侧板302的一端均开设有滑动槽323,所述挡板309滑动处于所述滑动槽323的内部,所述挡板309的两侧分别固定连接有螺纹连接块316和滑杆连接块321,一侧所述侧板302上固定安装有第二伺服电机314,所述第二伺服电机314的输出端连接有第二丝杆315,所述第二丝杆315的端部活动连接有第一轴承座317,所述第一轴承座317固定安装有在所述侧板302上,所述螺纹连接块316螺纹连接在所述第二丝杆315上,另一侧所述侧板302一侧通过定位块322连接有滑杆320,所述滑杆连接块321滑动连接在所述滑杆320上,滑动槽323的设定可以使得挡板309便于进行升降调节,以及设有第二伺服电机314和第二丝杆315,可以实现对挡板309进行升降调节,且另一侧的滑杆320的设定可以保持挡板309在升降调节时候的稳定性,所述第一伺服电缸307设有四个,四组所述第一伺服电缸307分别设置在所述螺纹连接板305的两侧,所述接料板308的两侧分别固定安装有限位板318,第一伺服电缸307的设定可以实现对接料板308的进行高度调节,便于实现对采集样品进行接收,且设有四个第一伺服电缸307的设定可以保持接料板308的稳定性,且限位板318的设定可以防止采集样品发生洒落,所述第一丝杆310的端部活动连接有第二轴承座319,所述第二轴承座319固定安装在所述顶盖2上,所述第二轴承座319处于所述存储机构4的下部,第二轴承座319的设定可以使得第一丝杆310能够保持平衡稳定的转动,且处于存储机构4的下部,便于实现移动将采集样品进行存放在存储机构4的内部。
52.在具体设置时,所述框架401的内部设有三组所述隔板402,所述框架401的一端铰
接有柜门403,所述柜门403上固定安装有把手404,三组隔板402的设定可以实现对采集样品进行存放,并且柜门403的设定便于打开,实现对采集样品进行取出。
53.在具体方案中,所述清洗壳体101的内部一端设有第三伺服电缸107,所述第三伺服电缸107的输出端连接所述扫地板103,所述清洗壳体101的内部另一端设有第四伺服电缸115,所述第四伺服电缸115的输出端连接所述拖地板104,所述扫地板103和所述拖地板104上均设有伸缩杆117,所述伸缩杆117的上端固定连接在所述清洗壳体101的底端,第三伺服电机107的设定可以实现对扫地板103的高度进行调节,第四伺服电机115的设定可以实现对拖地板104的高度进行调节,并且伸缩杆117的设定既能够实现升降调节,也能够实现保持稳定平衡。
54.在具体实施中,所述清洗壳体101的底部四角处分别固定安装有动力滚轮118,动力滚轮118的设定可以有效的实现对机器人进行运动,便于进行移动调节,实现对采集样品进行转运,所述清洗壳体101的内部还固定安装有电池组,所述清洗壳体101的内部还固定安装有动力电机,所述动力电机与所述动力滚轮118传动连接,所述电池组与所有的电力设备电性连接,通过电池组实现对装置中的所有电力设备进行供电运行,并且实现对对机器人进行动力输出,使得机器人能够运动
55.具体的,该具有清扫和转运功能的机械运输装置的工作原理:使用时,通过动力滚轮118使得机器人进行移动,移动到传输装置的位置时,启动第一伺服电缸307,使得第一伺服电缸307能够调节接料板308的高度,实现对采集样品进行接收,并且启动第二伺服电机314,使得第二伺服电机314通过第二丝杆315实现对挡板309进行高度调节,使得挡板309能够遮挡在接料板308的后端,实现对采集样品进行防护,接收采集样品后,将挡板309升起到最高处,然后,启动第一伺服电机304,使得第一伺服电机304能够通过第一丝杆310和螺纹连接板305带动固定板306和接料板308进行移动,使得接料板308对齐其中一个隔板402,然后将挡板309降下,再启动第二伺服电缸312,使得第二伺服电缸312带动推板313实现对采集样品进行推入到隔板402上进行存储,且在机器人进行运动的时候,启动第三伺服电缸107降低扫地板103的高度,使得扫地板103能够接触地面,实现对灰尘和杂物进行收集,然后启动气压泵111,使得气压泵111和气压尘箱110能够实现对收集的灰尘和杂物进行抽取,启动第四伺服电缸115降低拖地板104的高度,使得拖地板104接触地面,然后通过水泵113实现抽取储水箱112中水输送到拖地板104内,实现拖地,并且通过吸水板106和吸水盒109将拖地后的水渍吸收,防止地面残留水渍。
56.以上所述仅为本技术的实施例而已,并不用于限制本技术的保护范围,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
57.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应所述以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1