机器人的控制方法、装置、机器人、存储介质及程序产品与流程
本技术实施例涉及人工智能,特别涉及一种机器人的控制方法、装置、机器人、存储介质及程序产品。
背景技术:
1、随着人工智能技术的发展,一些组织和科研机构相继推出了多款能够实现状态自行切换的机器人,诸如站立状态切换为爬行状态、站立状态切换为趴地状态等。
2、以四足机器人为例,目前对于四足机器人的状态自行切换的研究,大多是在具有足够大的落脚范围内进行的,对于一些特殊场景,四足机器人的状态自行切换研究相对较少,从而导致在一些特殊场景(如落脚范围狭小)下,目前的四足机器人的状态自行切换能力不足。
技术实现思路
1、本技术实施例提供了一种机器人的控制方法、装置、机器人、存储介质及程序产品,能够提高机器人的状态自行切换能力,从而提高机器人的适用性,所述技术方案如下:
2、根据本技术实施例的一个方面,提供了一种机器人的控制方法,所述机器人包括躯干,以及与所述躯干连接的第一机械腿组和第二机械腿组,所述第一机械腿组包括至少两条足轮复合式的机械腿,所述足轮复合式的机械腿通过驱动轮或足部进行运动,所述方法包括:
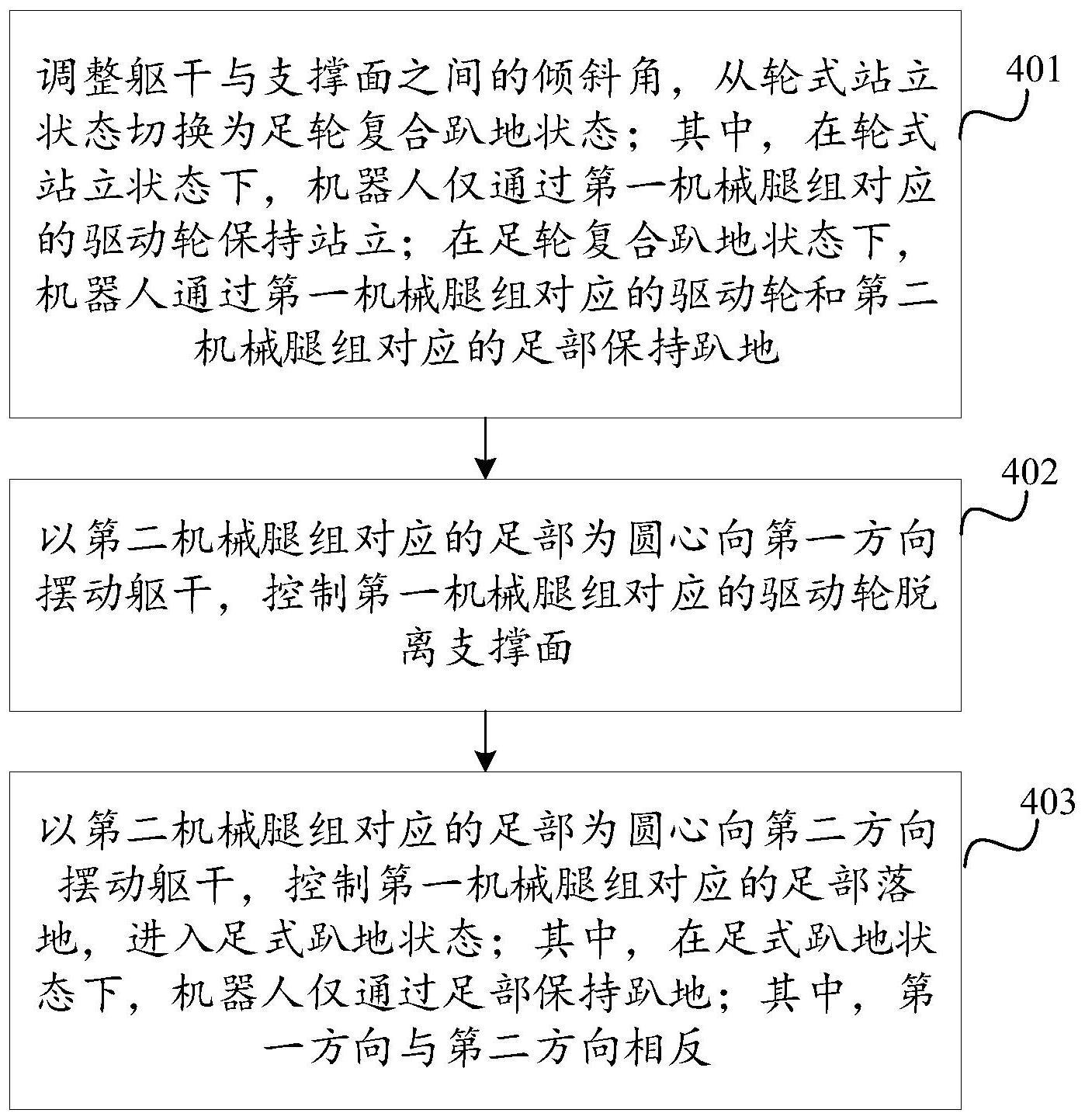
3、调整所述躯干与支撑面之间的倾斜角,从轮式站立状态切换为足轮复合趴地状态;其中,在所述轮式站立状态下,所述机器人仅通过所述第一机械腿组对应的驱动轮保持站立;在所述足轮复合趴地状态下,所述机器人通过所述第一机械腿组对应的驱动轮和所述第二机械腿组对应的足部保持趴地;
4、以所述第二机械腿组对应的足部为圆心向第一方向摆动所述躯干,控制所述第一机械腿组对应的驱动轮脱离支撑面;
5、以所述第二机械腿组对应的足部为圆心向第二方向摆动所述躯干,控制所述第一机械腿组对应的足部落地,进入足式趴地状态;其中,在所述足式趴地状态下,所述机器人仅通过足部保持趴地;
6、其中,所述第一方向与所述第二方向相反。
7、根据本技术实施例的一个方面,提供了一种机器人的控制方法,所述机器人包括躯干,以及与所述躯干连接的第一机械腿组和第二机械腿组,所述第一机械腿组包括至少两条足轮复合式的机械腿,所述足轮复合式的机械腿通过驱动轮或足部进行运动,所述方法包括:
8、调整所述躯干与支撑面之间的倾斜角,从轮式站立状态切换为足轮复合趴地状态;其中,在所述轮式站立状态下,所述机器人仅通过所述第一机械腿组对应的驱动轮保持站立;在所述足轮复合趴地状态下,所述机器人通过所述第一机械腿组对应的驱动轮和所述第二机械腿组对应的足部保持趴地;
9、控制所述躯干向所述第一机械腿组中的第一机械腿方向倾斜,在所述第一机械腿组中的第二机械腿在重力作用下脱离支撑面的情况下,将所述第二机械腿从驱动轮落地支撑状态切换为足部落地支撑状态;
10、控制所述躯干向所述第二机械腿方向倾斜,在所述第一机械腿在重力作用下脱离支撑面的情况下,将所述第一机械腿从所述驱动轮落地支撑状态切换为所述足部落地支撑状态。
11、根据本技术实施例的一个方面,提供了一种机器人的控制装置,所述机器人包括躯干,以及与所述躯干连接的第一机械腿组和第二机械腿组,所述第一机械腿组包括至少两条足轮复合式的机械腿,所述足轮复合式的机械腿通过驱动轮或足部进行运动,所述装置包括:
12、足轮趴地切换模块,用于调整所述躯干与支撑面之间的倾斜角,从轮式站立状态切换为足轮复合趴地状态;其中,在所述轮式站立状态下,所述机器人仅通过所述第一机械腿组对应的驱动轮保持站立;在所述足轮复合趴地状态下,所述机器人通过所述第一机械腿组对应的驱动轮和所述第二机械腿组对应的足部保持趴地;
13、驱动轮离地模块,用于以所述第二机械腿组对应的足部为圆心向第一方向摆动所述躯干,控制所述第一机械腿组对应的驱动轮脱离支撑面;
14、足部趴地切换模块,用于以所述第二机械腿组对应的足部为圆心向第二方向摆动所述躯干,控制所述第一机械腿组对应的足部落地,进入足式趴地状态;其中,在所述足式趴地状态下,所述机器人仅通过足部保持趴地;其中,所述第一方向与所述第二方向相反。
15、根据本技术实施例的一个方面,提供了一种机器人的控制装置,所述机器人包括躯干,以及与所述躯干连接的第一机械腿组和第二机械腿组,所述第一机械腿组包括至少两条足轮复合式的机械腿,所述足轮复合式的机械腿通过驱动轮或足部进行运动,所述装置包括:
16、足轮趴地切换模块,用于调整所述躯干与支撑面之间的倾斜角,从轮式站立状态切换为足轮复合趴地状态;其中,在所述轮式站立状态下,所述机器人仅通过所述第一机械腿组对应的驱动轮保持站立;在所述足轮复合趴地状态下,所述机器人通过所述第一机械腿组对应的驱动轮和所述第二机械腿组对应的足部保持趴地;
17、第一足部切换模块,用于控制所述躯干向所述第一机械腿组中的第一机械腿方向倾斜,在所述第一机械腿组中的第二机械腿在重力作用下脱离支撑面的情况下,将所述第二机械腿从驱动轮落地支撑状态切换为足部落地支撑状态;
18、第二足部切换模块,用于控制所述躯干向所述第二机械腿方向倾斜,在所述第一机械腿在重力作用下脱离支撑面的情况下,将所述第一机械腿从所述驱动轮落地支撑状态切换为所述足部落地支撑状态。
19、根据本技术实施例的一个方面,提供了一种机器人,所述机器人包括处理器和存储器,所述存储器中存储有计算机程序,所述计算机程序由所述处理器加载并执行以实现上述机器人的控制方法。
20、根据本技术实施例的一个方面,提供了一种计算机可读存储介质,所述可读存储介质中存储有计算机程序,所述计算机程序由处理器加载并执行以实现上述机器人的控制方法。
21、根据本技术实施例的一个方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。机器人的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该机器人执行上述机器人的控制方法。
22、本技术实施例提供的技术方案可以包括如下有益效果:
23、通过调整躯干与支撑面之间的倾斜角,实现从轮式站立状态到足轮复合趴地状态的切换,再基于第二机械腿组对躯干进行起摆,控制第一机械腿组对应的驱动轮脱离支撑面,并在起摆过程中,将驱动轮落地支撑切换为足部落地支撑,从而实现从轮式站立状态到足式趴地状态的切换,进而增加了机器人的状态自行切换方法,提高了机器人的状态自行切换灵活性。
24、另外,采用本技术实施例提供的技术方案,使得机器人在一些特殊场景(如落脚范围狭小)下,也可实现从轮式站立状态到足式趴地状态的切换,解决了因场景特殊而导致机器人无法从轮式站立状态切换到足式趴地状态的问题,从而扩展了机器人的适用场景和提高了机器人的状态自行切换能力,进而提高了机器人的适用性。
25、另外,对于足轮复合四足机器人来说,采用本技术实施例提供的技术方案,可以使得足轮复合四足机器人在落脚范围狭小(如梅花桩)的情况下,亦可实现轮式站立状态与足式趴地状态之间的自主切换,从而提高了足轮复合四足机器人的适用性。
- 还没有人留言评论。精彩留言会获得点赞!