基于摄像机输入的负重轮角度估计的制作方法
本公开的领域大体上涉及车辆,该车辆具有可包括转向齿条和/或转向角度传感器的系统。
背景技术:
1、车辆典型地包括转向系统。
技术实现思路
1、许多方案可包括基于摄像机输入来估计负重轮角度的车辆、系统和方法。
2、许多方案可包括以下中的至少一者:基于摄像机的负重轮角度检测;使用可用的摄像机的轮胎对准问题检测;或使用摄像机的严重负重轮/轮胎问题检测。
3、在本发明的范围内的其他说明性方案将从下文提供的详细描述变得显而易见。应当理解的是,在公开本发明的方案时,详细描述和具体示例仅旨在用于说明的目的,而不旨在限制本发明的范围。
技术特征:
1.一种系统,其包括至少一个处理器、存储器、指令,所述指令储存在所述存储器中并且能够由所述处理器执行以:
2.根据权利要求1所述的系统,其特征在于,所述车辆构件为所述车辆的侧视镜。
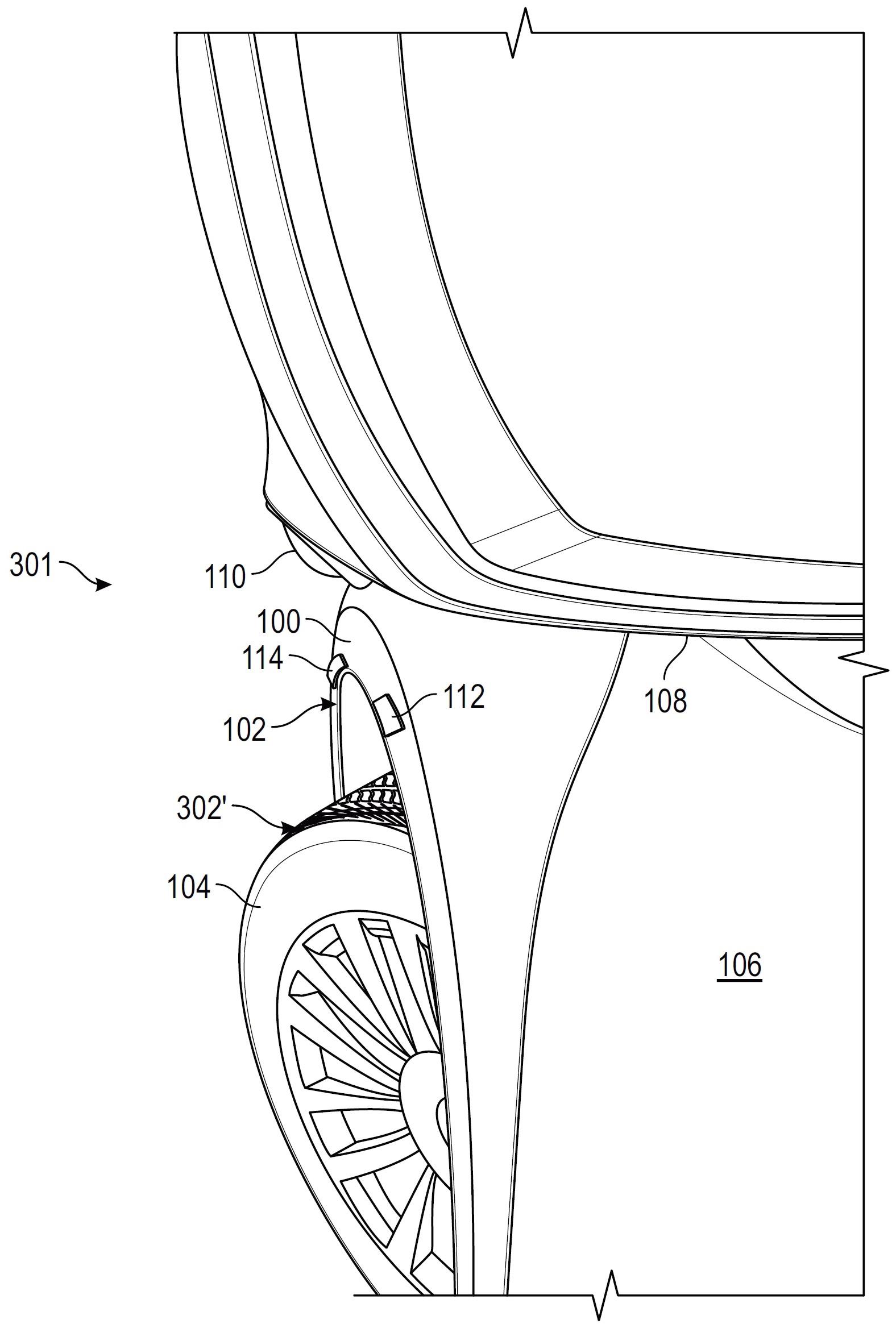
3.根据权利要求1所述的系统,其特征在于,所述车辆构件为所述车辆的前侧围面板,并且所述摄像机在所述可转向负重轮前面的位置处附接到所述前侧围面板。
4.根据权利要求1所述的系统,其特征在于,所述车辆构件为所述车辆的前侧围面板,并且所述摄像机在所述可转向负重轮后面的位置处附接到所述前侧围面板。
5.根据权利要求1所述的系统,其特征在于,所述车辆构件为所述车辆的前侧围面板,并且所述摄像机在所述可转向负重轮上方的位置处附接到所述前侧围面板。
6.根据权利要求1所述的系统,其特征在于,所述系统还包括在从附接到车辆构件的摄像机接收关于车辆的可转向负重轮的视觉或红外数据的动作之前,确定所述车辆的转向角度传感器是否出现故障。
7.根据权利要求1所述的系统,其特征在于,所述系统还包括在从附接到车辆构件的摄像机接收关于车辆的可转向负重轮的视觉或红外数据的动作之前,确定所述车辆的转向小齿轮、转向齿条、小齿轮传感器或齿条传感器是否出现故障。
8.根据权利要求1所述的系统,其特征在于,所述转向角度通过可转向负重轮从在所述车辆沿直线前进方向行驶的情况下在所述车辆的前侧围面板的轮舱内部的位置的位移来确定。
9.根据权利要求1所述的系统,其特征在于,所述转向角度通过所述摄像机可见的所述可转向负重轮的侧壁的面积来确定。
10.根据权利要求1所述的系统,其特征在于,根据红外数据确定所述转向角度。
11.一种方法,其包括:
12.根据权利要求11所述的方法,其特征在于,所述车辆构件为所述车辆的侧视镜。
13.根据权利要求11所述的方法,其特征在于,所述车辆构件为所述车辆的前侧围面板,并且所述摄像机在所述可转向负重轮前面的位置处附接到所述前侧围面板。
14.根据权利要求11所述的方法,其特征在于,所述车辆构件为所述车辆的前侧围面板,并且所述摄像机在所述可转向负重轮后面的位置处附接到所述前侧围面板。
15.根据权利要求11所述的方法,其特征在于,所述车辆构件为所述车辆的前侧围面板,并且所述摄像机在所述可转向负重轮上方的位置处附接到所述前侧围面板。
16.根据权利要求11所述的方法,其特征在于,所述方法还包括在从附接到车辆构件的摄像机接收关于车辆的可转向负重轮的视觉或红外数据的动作之前,确定所述车辆的转向角度传感器是否出现故障。
17.根据权利要求11所述的方法,其特征在于,所述方法还包括在从附接到车辆构件的摄像机接收关于车辆的可转向负重轮的视觉或红外数据的动作之前,确定所述车辆的转向小齿轮、转向齿条、小齿轮传感器或齿条传感器是否出现故障。
18.根据权利要求11所述的方法,其特征在于,所述转向角度通过可转向负重轮从在所述车辆沿直线前进方向行驶的情况下在所述车辆的前侧围面板的轮舱内部的位置的位移来确定。
19.根据权利要求11所述的方法,其特征在于,所述转向角度通过所述摄像机可见的可转向负重轮的侧壁的面积来确定。
20.根据权利要求11所述的方法,其特征在于,所述转向角度根据红外数据确定。
技术总结
许多方案可包括基于摄像机输入来估计负重轮角度的车辆、系统和方法。许多方案可包括以下中的至少一者:基于摄像机的负重轮角度检测;使用可用的摄像机的轮胎对准问题检测;或使用摄像机的严重负重轮/轮胎问题检测。
技术研发人员:O·卡夫
受保护的技术使用者:操纵技术IP控股公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!