一种仿生六足爬虫装置
本发明涉及仿生机械领域,具体涉及一种仿生六足爬虫装置。
背景技术:
1、昆虫最迟在约4亿年前演化出现,截至2022年,全球记录所记录的昆虫种类10万多种,是生命演化历史上种类数量最多的一个类群。它们遍布各个大陆,总重量甚至超过了其它所有动物的总和,它们具有改变地球面貌的力量,是陆地生息繁衍的霸主。如此兴盛的生物类群,值得我们学习,而我们也正在追随昆虫演化的脚步,一点一点完善科技和发明。
2、仿生六足爬虫装置在很多国家都受到了重视,也是装置领域的研究热点之一。它的研究涉及到了生物科学,仿生学,机构学,传感技术及信息处理等多门学科。经过近年来的研究发展,世界各国在仿生领域有着飞速的发展,同时研制出了多款功能不同的仿生六足爬虫装置。
3、现有技术1cn114516374a公开了一种基于同步带传动的六足机器人,其工作方式为,当对开启一级腿驱动舵机1时,使一级腿驱动舵机1带动腿根十字连接件11在水平方向左右移动,从而使三级腿34在左右方向移动,从而对三级腿34在水平方向上位置的调节,当启动二级腿驱动舵机2时,使二级腿驱动舵机2带动二级腿左侧板21和二级腿右侧板22在竖直方向移动,从而对三级腿34在竖直方向上位置的调节,从而对三级腿34的角度进行调节,当启动三级腿驱动舵机3时,使三级腿驱动舵机3通过传动组件带动转轴进行转动,从而继续对三级腿34的角度进行调节,且一级腿驱动舵机1、二级腿驱动舵机2以及三级腿驱动舵机3可以同时气筒对三级腿4进行调节。
4、现有技术2cn115303381a公开了基于死点支撑效应的高速低能耗六足机器人,其包括六个腿部单体,每个腿部单体末端均转动安装在机体上,并能在120°的工作空间内摆动不干涉,六个腿部单体呈椭圆式布置在机体的两侧。
5、上述两个现有技术是目前技术中较具代表性的,现有技术1每个腿部都是独立驱动的,缺少联动的效果,会影响到行进的速度和敏捷性,这也是这类六足机器人普遍存在的缺陷,为了提高速度只能选择更好的电机。现有技术2是两侧腿部对称设置的代表,有独立控制每个腿的,与上述一样存在单个分开控制会影响速度的问题;也有对称同类型的腿同时运动的,会造成速度交底且转向困难的问题。
6、因此,需要分析和研究六足仿生爬虫装置,为实现运动快速性、敏捷性、稳定性的要求。
技术实现思路
1、本发明的目的是提供一种对爬虫的运动进行模拟的仿生装置,解决现有技术中独立控制和对称控制所带来的降低了速度、敏捷性、稳定性和转向难的问题。
2、本发明是通过以下技术方案得以实现的:
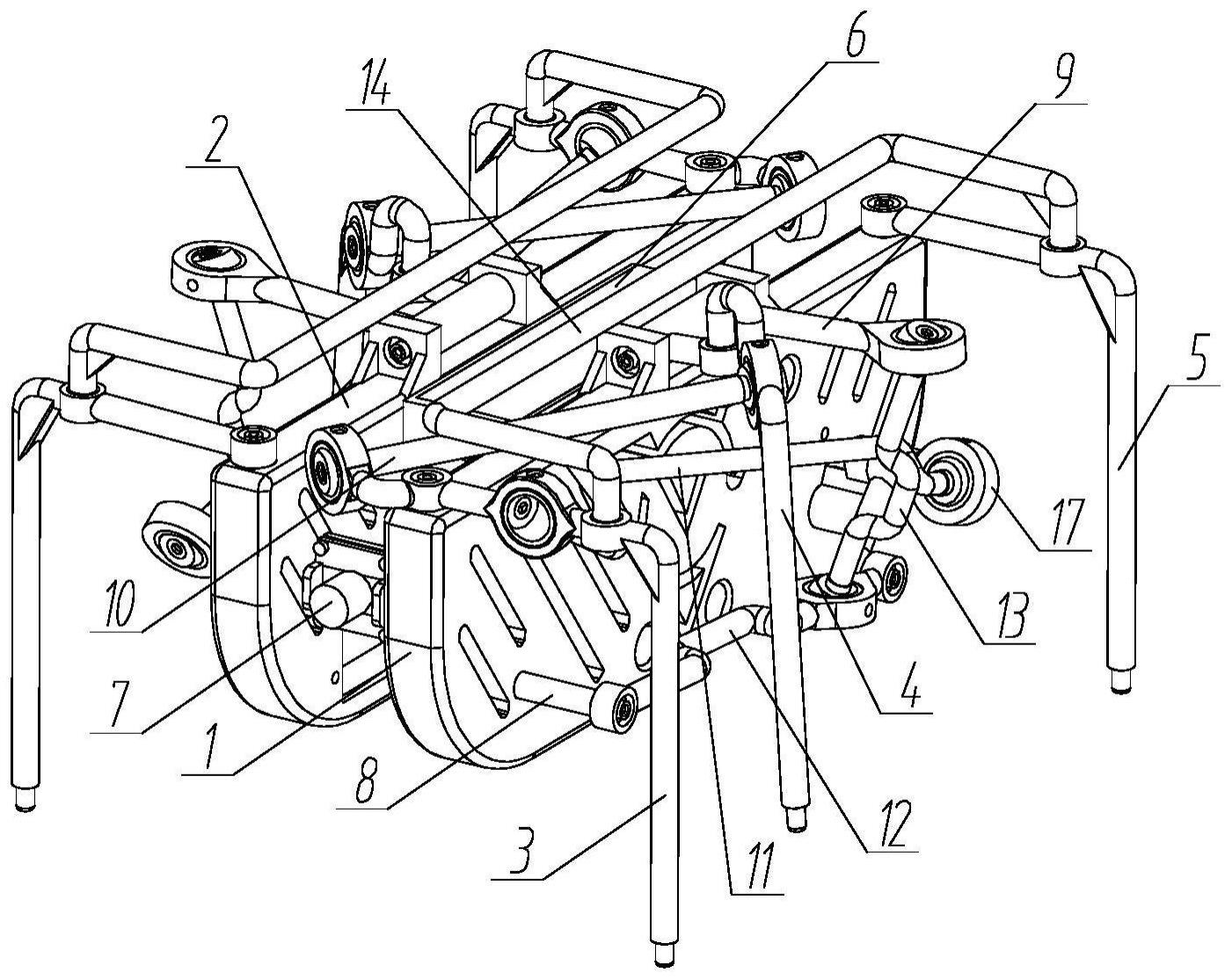
3、一种仿生六足爬虫装置,所述仿生六足爬虫装置具有主体和行走腿机构,所述主体包括相互平行间隔设置的左基板1和右基板2,在左基板1与右基板2的外侧均设置有行走腿机构,两个行走腿机构相对于主体呈中心对称设置,在左基板1与右基板2之间设置有控制箱6,所述控制箱6连接左基板1和右基板2,在所述主体的前侧设置有摄像头7,左基板1外侧的行走腿机构包括由前向后依次设置为第一侧腿3、中腿4和第二侧腿5,第一侧腿3、中腿4和第二侧腿5的结构不相同。
4、进一步地,第一侧腿1呈“γ”型结构,具有第一垂直腿3.1和第一水平腿3.2,在所述第一水平腿3.2的端部和中部分别设置有轴承座一3.3和轴承座二3.4,在所述轴承座二3.4的两侧设置有轴套一3.5和轴套二3.6。
5、进一步地,中腿4具有中垂直腿4.1和n型腿4.2,所述中垂直腿4.1的上端与n型腿4.2一侧的端部通过轴承座三4.3连接。
6、进一步地,第二侧腿5呈“γ”型结构,具有第二垂直腿5.1和第二水平腿5.2,在所述第二水平腿5.2端部设置有轴套三5.3,在所述第二水平腿5.2上设置有轴套四5.4。
7、进一步地,在所述左基板1的上侧面上由前向后依次设置有第一固定轴20、铰接座21、第二固定轴22,
8、第一侧腿1通过轴套一3.5与第一固定轴20铰接,
9、所述铰接座21上铰接有ㄇ型杆9,所述ㄇ型杆9具有与铰接座21铰接的套管段9.1、垂直于套管段9.1的短连杆9.2和长连杆9.4,在所述短连杆9.2的端部上设置有轴套五9.3,在所述长连杆9.4的端部上设置有轴承座四9.5,中腿4上的n型腿4.2的端部与轴套五9.3铰接,
10、第二侧腿5通过轴套三5.3与第二固定轴22铰接。
11、进一步地,所述行走腿机构还包括第一球副杆10、第二球副杆11、摆杆12、第三球副杆13、连腿杆14、转轴套16和连杆17,
12、第一球副杆10呈直杆状,所述第一球副杆10的两端通过向心关节轴承连接轴承座一3.3和轴承座三4.3,
13、第二球副杆11呈型,所述第二球副杆11的两端通过向心关节轴承连接轴承座二3.4和连杆17一端轴套七17.1上的轴承座六23,
14、摆杆12呈型,所述摆杆12的两端均设置有轴套六12.1,在一端杆上设置有轴承座五12.2,摆杆12两端的轴套六12.1分别连接设置在左基板1上的机架轴8和连杆17的另一端,
15、第三球副杆13呈型,其两端分别通过向心关节轴承连接轴承座四9.5和轴承座五12.2,
16、连腿杆14具有横杆段14.1、过渡段14.2、垂直段14.3,垂直段14.3与横杆段14.1呈空间垂直状态,且通过与横杆段14.1垂直的过渡段14.2连接于横杆段14.1的两端,
17、转轴套16具有轴套主体16.1和固定在轴套主体16.1外侧的轴套连接端16.2,所述轴套连接端16.2与轴套七17.1铰接,所述轴套主体16.1与控制箱6上的左电机18的输出轴15连接。
18、进一步地,所述控制箱6内部设置有电源和控制模块。
19、本发明具有以下技术效果:
20、本发明两个行走腿机构相对于主体呈中心对称设置,既能够灵活的向前运动,也能够灵活的转向。设置有第一侧腿、中腿和第二侧腿,且支腿之间通过连杆和向心关节轴承连接,为满足相连接的需求,合理的设置第一侧腿、中腿和第二侧腿以及相互之间连接杆的形状,使支腿能够紧凑的布局在主体的两侧,紧凑的布局使得能够进一步提高六足爬虫的速度和转向的灵活度。本发明的六足爬虫装置符合六足爬虫运动规律且爬行快速、敏捷、稳定。同时本装置具有操作简单,成本低等特点。
技术特征:
1.一种仿生六足爬虫装置,所述仿生六足爬虫装置具有主体和行走腿机构,其特征在于:所述主体包括相互平行间隔设置的左基板1和右基板2,在左基板1与右基板2的外侧均设置有行走腿机构,两个行走腿机构相对于主体呈中心对称设置,在左基板1与右基板2之间设置有控制箱6,所述控制箱6连接左基板1和右基板2,在所述主体的前侧设置有摄像头7,左基板1外侧的行走腿机构包括由前向后依次设置为第一侧腿3、中腿4和第二侧腿5,第一侧腿3、中腿4和第二侧腿5的结构不相同。
2.根据权利要求1所述的一种仿生六足爬虫装置,其特征在于:第一侧腿1呈“γ”型结构,具有第一垂直腿3.1和第一水平腿3.2,在所述第一水平腿3.2的端部和中部分别设置有轴承座一3.3和轴承座二3.4,在所述轴承座二3.4的两侧设置有轴套一3.5和轴套二3.6。
3.根据权利要求2所述的一种仿生六足爬虫装置,其特征在于:中腿4具有中垂直腿4.1和n型腿4.2,所述中垂直腿4.1的上端与n型腿4.2一侧的端部通过轴承座三4.3连接。
4.根据权利要求3所述的一种仿生六足爬虫装置,其特征在于:第二侧腿5呈“γ”型结构,具有第二垂直腿5.1和第二水平腿5.2,在所述第二水平腿5.2端部设置有轴套三5.3,在所述第二水平腿5.2上设置有轴套四5.4。
5.根据权利要求4所述的一种仿生六足爬虫装置,其特征在于:在所述左基板1的上侧面上由前向后依次设置有第一固定轴20、铰接座21、第二固定轴22,
6.根据权利要求5所述的一种仿生六足爬虫装置,其特征在于:所述行走腿机构还包括第一球副杆10、第二球副杆11、摆杆12、第三球副杆13、连腿杆14、转轴套16和连杆17,
7.根据权利要求6所述的一种仿生六足爬虫装置,其特征在于:所述控制箱6内部设置有电源和控制模块。
技术总结
本发明公开了一种仿生六足爬虫装置,所述仿生六足爬虫装置具有主体和行走腿机构,所述主体包括相互平行间隔设置的左基板和右基板,在左基板与右基板的外侧均设置有行走腿机构,两个行走腿机构相对于主体呈中心对称设置,在左基板与右基板之间设置有控制箱,所述控制箱连接左基板和右基板,在所述主体的前侧设置有摄像头,左基板外侧的行走腿机构包括由前向后依次设置为第一侧腿、中腿和第二侧腿,第一侧腿、中腿和第二侧腿的结构不相同。本发明符合六足爬虫运动规律且爬行快速、敏捷、稳定。同时本装置具有操作简单,成本低等特点。
技术研发人员:郭颖颖,王瀚超,李定强,熊国栋,杜晓宾,韦宗德,卢东,罗闽良
受保护的技术使用者:龙岩学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!