一种物流机器人的制作方法
1.本实用新型涉及物资转运技术领域,尤其涉及一种物流机器人。
背景技术:
2.在医院日常工作中,因为医院手术次数较多,术前同一时间申请、出库、配送的护士较多,并且物资的取用登记过程全为手工记录,容易造成少记、多记和漏记等现象的出现。手术耗材的存取没有设置人员权限管理,所有医务人员都可以自行进行耗材拿取,这样耗材拿取过程中的安全性、可靠性无法得到保障。
3.在医务人员存取物资的过程中,敞开式地工作环境难免会有耗材与人接触等现象,可能会造成物资的污染。并且每台手术耗材用量较大,护士无法保证能够一次拿取足够的手术耗材,术中平均每台手术护士可能需要往返手术室耗材库房6~7次,这样不仅不能保证运输的时效性及运输达标率,还大大耗费了医护人员的精力,分散手术中的注意力,导致手术的成功率受到影响。
4.在术后会产生大量的废弃物、污染物以及多余的耗材,这些物品的统计也需要医护人员进行手工登记处理,漏记少记错记等现象也频频出现。同时医务人员无法24h连续工作,对于突发手术的出现,可能会导致无法进行有效快速的响应。不但浪费了医院的人力物力,使医院的品牌形象受损,医患之间矛盾加剧,而且满足不了当今现代化医院的精细化管理要求。
5.其实手术室耗材库-术间耗材管理工作的难点主要在于信息化程度不高,医院管理手段的滞后导致耗材的取用无法透明化及溯源。手术护士及巡回护士花费大量的时间精力在耗材的取用上,不仅造成医院人力成本的提高,降低了医院的服务水平和服务质量。
6.公开号为cn111568068a的发明专利申请公开了一种医疗耗材室内运输机器人,包括能够存放物资的柜体和驱动柜体运动的轮体,能够实现物资的装载和运输,并基于rfid标签记录内置医疗耗材信息,进而实现取放耗材的自动记录;但是rfid标签的使用成本较高,对于手术室耗材来说,标签回收再利用的难度也较高,因此会增加整体的运营成本,另外,虽然能够基于rfid实现物资的自动识别和取用检测,但由于柜门是任何人都能打开的,因此只能登记物资的变化情况,而无法确定物资领用人的信息,无法实现物资的无人化精细管理。
技术实现要素:
7.本实用新型所要解决的技术问题在于提供一种能够验证存放物资人员身份的物流机器人。
8.本实用新型是通过以下技术方案解决上述技术问题的:一种物流机器人,包括箱体和支撑箱体的行走底盘,所述箱体内具有储物空间和封闭储物空间的箱门,所述箱门通过电磁锁进行封闭,所述箱体上设置有控制电磁锁状态的身份识别单元。
9.优选的,所述身份识别单元的识别方式包括密码、指纹、磁卡、遥控器、app指令中
的至少一种。
10.优选的,还包括360监控单元,所述箱体行进方向的前方具有前脸,所述360监控单元包括分别布置在前脸的表面和两侧的至少一个摄像头。
11.优选的,所述前脸的表面具有仿形鼻,前脸两侧分别设置有仿形耳,所述仿形鼻和仿形耳上分别设置有一个所述摄像头。
12.优选的,所述前脸还包括显示面板,所述显示面板能够显示出发地、目的地、物资信息、行驶状态、电量中的至少一种或几种信息。
13.优选的,所述行走底盘包括与箱体固定连接的上安装层和支撑上安装层的下安装层,所述下安装层底部设置有行走轮,箱体的底板固定安装在所述上安装层上。
14.优选的,所述行走轮包括驱动轮和万向轮,所述下安装层包括安装板,所述安装板的四角分别设置有一个所述万向轮,沿物流机器人行走方向的两侧中间位置还分别设置有一个所述驱动轮。
15.优选的,两侧的所述驱动轮能够分别独立的控制转速和相对安装板的高度。
16.优选的,所述安装板上在两侧驱动轮位置分别设置有悬板,所述悬板通过固定杆水平固定在安装板上方,所述悬板下方浮动设置有一安装座,所述驱动轮的转轴固定在所述安装座上,所述驱动轮跟随安装座浮动调整高度以适应地面高度,并通过所述悬板向驱动轮提供挤压地面的压力。
17.优选的,所述安装座上表面的两侧分别设置有一个导杆,安装座上表面的中间位置固定设置有一个限位杆,所述限位杆的上端具有处于悬板上方的限位板,所述限位板能够与悬板的表面抵接配合;所述导杆上套设有处于悬板和安装座之间的浮动弹簧;所述安装板表面具有允许驱动轮和安装座穿过的通孔。
18.优选的,所述限位杆与两侧的导杆之间还分别设置有一个导向轴,所述悬板上设置有与导向轴滑动配合的直线轴承。
19.优选的,所述上安装层包括与箱体底板连接的装饰板和盖合在装饰板下方的上壳,所述安装板上盖合有下壳,所述安装板上设置有依次穿过下壳和上壳与所述底板固定连接的支撑杆。
20.优选的,所述安装板上还固定设置有蓄电池,所述下壳尾部的侧面固定设置有两个铜排,所述铜排分别与蓄电池的正负极连接形成充电接头。
21.优选的,所述安装板前方固定有扫描雷达,所述下壳的前侧下沉与上壳形成前侧沿水平方向开口的扫描间隙,所述扫描雷达固定延伸到所述扫描间隙内。
22.优选的,所述下壳的四个侧面上分别设置有超声波传感器,所述下壳的前方固定设置有深度相机,所述安装板上设置有工控机,所述工控机通过无线路由器与控制中心通信连接。
23.优选的,所述360监控单元还包括固定在上壳尾部侧面的摄像头,所述前脸和下壳的后部还分别固定设置有一个前视相机,所述360监控单元与两个所述前视相机的信号融合形成物流机器人的环境监控视频。
24.本实用新型提供的物流机器人的优点在于:通过电磁锁封闭箱门,防止储存在箱体内的物料掉落或被他人取走,通过所述身份识别单元识别用户信息,在身份匹配的情况下解锁开门,从而能够取放物料,实现对用户身份的验证,避免物料丢失或错误领用的问
题,提高物资管理的精细化水平。
25.通过360监控单元对物流机器人的四周环境进行实时监控,从而能够实现对物流机器人的远程驾驶,并对前脸设计仿形结构,提升趣味性和观赏性;并可通过显示面板显示机器人信息;
26.行走底盘通过万向轮支撑,通过浮动驱动结构适应路面起伏的路况,保护驱动轮的安全,防止驱动轮过载;并通过多种导向结构进行导向,提高驱动轮浮动的稳定性,两侧驱动轮可分别控制速度,方便进行差速转向,
27.物流机器人根据需求设置有扫描雷达、微波探测器、深度相机等,能够实现周边环境影响的采集和传输,并能够在运动过程中主动避障,保障人员、设备和物资的安全。
附图说明
28.图1为本实用新型的实施例提供的物流机器人的示意图;
29.图2为本实用新型的实施例提供的物流机器人的仿形鼻的示意图;
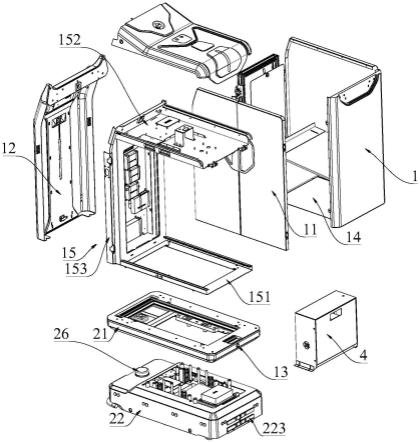
30.图3为本实用新型的实施例提供的物流机器人的爆炸图;
31.图4为本实用新型的实施例提供的物流机器人的底部结构示意图;
32.图5为本实用新型的实施例提供的物流机器人的下安装层的示意图;
33.图6为本实用新型的实施例提供的物流机器人的万向轮的安装结构示意图;
34.图7为本实用新型的实施例提供的物流机器人的驱动轮安装结构示意图;
35.图8为本实用新型的实施例提供的物流机器人的行走底盘示意图。
具体实施方式
36.为使本实用新型的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
37.如图1所示,本实用新型提供了一种搬运机器人,包括箱体1和支撑所述箱体1的行走底盘2,所述箱体1内具有储物空间和封闭储物空间的箱门11,所述箱门11通过电磁锁(图未示)进行封闭,所述箱体1上还设置有控制电磁锁状态的身份识别单元(图未示)。
38.具体的,所述身份识别单元可通过密码、指纹、指静脉、磁卡、遥控器、app指令、远程指令等方式进行开门操作,在完成身份识别时,可同步记录身份信息,记录物资领用人的身份,可通过rfid技术进行物料的盘点,或通过摄像头记录物资的变化情况,进行物资变化量的盘点,并与记录的身份信息匹配完成物资领用的自动记录。在进行点对点的定向配送时,仅对开门作业的人员身份进行验证即可,或者达到指定区域后远程控制箱体1开门,从而方便作业人员取出物料。
39.进一步的,所述物流机器人还包括360监控单元(图未示),所述箱体1行进方向的前方具有前脸12,所述360监控单元包括分别布置在前脸12的表面和两侧的至少一个摄像头13;从而能够监控和记录物流机器人周边的环境。
40.所述360监控单元可直接选用车载360影像,并可通过无线路由器与控制中心远程
通信,可将物流机器人周边环境的影像信息实时的反馈到控制中心,对行驶状态、取用人员进行监控。并可基于wifi传递信号实现行驶状态的远程遥控,可在控制中心使用摇杆、方向盘、手柄等方式直接输出指令控制物流机器人的运动,实现远程驾驶,从而能够确保作业人员可以实时获知和控制物流机器人的状态,保障物资运输的安全;在医院这种用户身份复杂的场所降低与人体和其他障碍物发生碰撞的风险,确保人员和物资的安全。
41.进一步的,结合图2,为了提升物流机器人整体美观程度,在所述前脸12的表面具有仿形鼻121,前脸12两侧分别设置有仿形耳122,所述仿形鼻121和仿形耳122上分别设置有一个所述摄像头13,从而使物流机器人具有卡通造型,提升趣味性,摄像头13可以自然的固定在仿形结构上,降低突兀感。
42.所述前脸12上还设置有显示面板123,所述显示面板123能够显示物流机器人内部的物资信息、出发地、目的地、行驶状态、驾驶模式、电量、时间等信息或其中至少一种信息,也可以根据用户需求个性化的定义显示信息;用户还可通过所述显示面板123输入密码或账户密码打开所述箱门11,实现对取用物品的监管。
43.所述物流机器人还具有音响,具体可根据音响的结构适应性的固定在箱体1的侧面或顶部或行走底盘内,并向外部播放声音,可在使用时播放提示音提醒用户避让,也可在到达目的地后提醒用户出来领取物资。
44.结合图3和图4,所述行走底盘2包括与箱体1固定连接的上安装层21和支撑上安装层21的下安装层22,所述下安装层22底部设置有行走轮3,所述箱体1的底板14固定安装在所述上安装层21上。
45.参考图4,所述行走轮3包括万向轮31和驱动轮32,所述下安装层22包括安装板23,所述安装板23的四角分别设置有一个所述万向轮31,安装板23底部沿物流机器人行走方向的两侧的中间位置还分别设置有一个所述驱动轮32。
46.本实施中,通过分布在安装板23底部四角的四个所述万向轮31支撑所述物流机器人及其装载的物资的重量,通过所述驱动轮32提供前后运动的驱动力,并基于两侧驱动轮32的速度差实现差速转向,进行方向的控制,更近一步的,为了适应高低起伏的路面情况,两侧的所述驱动轮32能够分别独立的控制转动速度和相对安装板23的高度,从而形成浮动的驱动结构。
47.结合图4、图5和图6,所述安装板23底部的四角分别设置有安装孔231,每个所述安装孔231上方固定设置有安装架232,所述安装架232下方还固定设置有脚轮轴承233,所述万向轮31与所述脚轮轴承233的内圈或外圈固定配合,万向轮31穿过安装孔231支撑所述安装板23,并进而实现对整个物流机器人重量的支撑。具体的,所述安装架232至少两端具有与安装板23固定连接的耳板234,所述耳板234优选与安装架232一体成型,将所述安装架232架空固定在所述安装孔231上方,通过所述安装架232安装万向轮31,同时阻挡万向轮31转动时带起的灰尘进入行走底盘2内。进一步的,可将安装架232设置为内凹的半封闭结构,直接将万向轮31的安装空间与行走底盘2的内部空间阻隔,防止外部灰尘影响行走底盘2内部的环境。
48.本实施例通过万向轮31与安装架232固定配合支撑物流机器人的重量,同时也承担所运输的物料的重量,本领域技术人员可根据对载重量的要求适应性的选择安装架232的结构和材料,并选择适当的万向轮31即可。
49.结合图5和图7,所述安装板23在两侧驱动轮32所在的位置分别设置有悬板24,所述悬板24的两端分别通过固定杆241沿水平方向固定在安装板23上方,所述悬板24下方悬浮设置有一安装座25,所述驱动轮32的转轴321固定在所述安装座25上,所述驱动轮32跟随安装座25浮动调整高度以适应地面高度,同时通过所述悬板24向驱动轮32提供挤压地面的压力,基于该压力使驱动理论32与地面产生摩擦力,并进而使驱动轮32转动时产生驱动物流机器人运动的驱动力。
50.所述转轴321固定安装在所述安装座上,所述驱动轮32能够相对所述转轴321自由转动,所述驱动轮32的轮盘具有驱动电机(图未示),驱动轮32通过自带的驱动电机驱动可方便的实现差速控制,并且驱动电机可跟随驱动轮32浮动,不需要力矩传递输出到驱动轮32上,简化了驱动结构。
51.进一步的,本实施例提供的控制安装座25浮动调整高度的结构具体包括在安装座25上表面的两侧分别设置一个导杆251,在安装座25上表面的中间位置固定设置一个限位杆252,所述限位杆252与悬板24滑动配合,且限位杆252的上端具有处于悬板24上方的限位板253,所述限位板253能够与悬板24的表面抵接,从而限制限位杆252相对悬板24滑动的最大行程,所述导杆251与悬板24滑动配合,导杆251上套设有处于悬板24和安装座25之间的浮动弹簧254,所述安装板23表面具有允许驱动轮32和安装座25穿过的通孔,以避免对驱动轮32和安装座25的浮动运动产生干涉;所述转轴321通过柔性导线连接到固定在安装板23上的电机驱动器(图未示)上,通过柔性导线向所述驱动电机供电和传输信号,实现对两侧驱动轮32的控制。
52.进一步的,所述限位杆252与两侧的导杆251之间还分别设置有一个导向轴255,所述导向轴255的下端固定在安装座25上,所述悬板24上设置有与导向轴255滑动配合的直线轴承242,通过所述导向轴255、导杆251、限位杆252分别与悬板24滑动配合,对安装座25的浮动运动进行导向,提高安装座25滑动运动的稳定性。
53.参考图8,所述上安装层21包括与箱体1的底板14连接的装饰板211和盖合在装饰板211下方的上壳212,所述下安装层22还包括盖合在所述安装板23上的下壳221,所述安装板23上设置有依次穿过下壳221和上壳212与所述底板14固定连接的支撑杆222。
54.结合图3和图8,所述箱体1具有一支撑框架15,所述支撑框架15至少包括底部框架151、顶部框架152以及连接底部框架151和顶部框架152的前部框架153,所述底部框架151通过所述支撑杆222固定连接,然后所述箱体1的底板14固定在所述底部框架151上,所述箱体1的前脸12固定安装在前部框架153上,箱体1的其他侧壁分别通过顶部框架152和底部框架151进行固定,在顶部框架152上还可以根据需要固定所述的身份识别单元,具体可以选择磁卡感应器、指纹识别器、指静脉识别仪、数字密码盘等仪器,还可以设置控制整车状态的开关、急停按钮等。
55.所述下安装层22的安装板23上还固定设置有蓄电池,为物流机器人提供电源,所述下壳221的尾部的外侧固定设置有两个水平设置的铜排223,所述铜排223分别与蓄电池的正负极连接形成充电接头,可在固定场地设置物流机器人的充电器4,通过与铜排223适配的对接结构实现物流机器人的自动对接充电,所述铜排223可设置为在常规状态下与蓄电池断开连接,在被充电器4挤压时,与蓄电池导通进行充电,从而避免在常规使用时存在的短路风险,同时避免人员接触时存在风险。
56.进一步的,所述安装板23的前方固定有扫描雷达26,所述下壳221的前侧下沉设置,与上壳212的前侧形成沿水平方向开口的扫描间隙(图未示),所述扫描雷达26固定延伸到扫描间隙内,从而对行走方向的前方和两侧进行扫描构图,分析环境信息,方便获取周边的人体和障碍物等信息,及时控制物流机器人调整状态,确保配送过程安全。
57.所述下壳221的四个侧面上分别设置有超声波传感器224,所述下壳221的前方固定设置有深度相机225,安装板23上设置有工控机226,所述工控机通过无线路由器与控制中心通信连接,传送指令和超声波传感器224及深度相机225的数据信号,控制中心能够远程遥控物流机器人的行驶状态和环境信息。所述超声波传感器224和深度相机225均能够用来进行障碍物检测,检测行走路径上的障碍物,通过设置避障距离,控制物流机器人及时刹车防止碰撞。
58.进一步的,为了全方位的避障,在所述下壳221的四角可分别相对行进方向倾斜的设置超声波传感器224,从而能够对周边全方位的障碍物进行检测,确保行驶安全。
59.所述360监控单元还包括固定在上壳212尾部外侧的摄像头13,所述前脸12和下壳221的后部还分别固定设置有一个前视相机(图未示),所述360监控单元与两个所述前视相机的信号融合形成物流机器人的环境监控视频,可在监控中心实时查看环境监控视频,获知物流机器人周边的视频数据,基于实时视频,能够进一步实现远程遥控,可在控制中心直接远程控制物流机器人,并可基于控制中心对操控的机器人进行切换和选择,可使用一台设备监控和操作多个物流机器人,降低所需的工作人员的数量,并确保物流配送过程的安全高效。
60.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1