一种蜘蛛仿生机器人
本技术涉及机器人,尤其涉及一种蜘蛛仿生机器人。
背景技术:
1、仿生机器人指是以模仿动物结构为目的制造的机器人。随着机器人技术的不断发展,步行机器人的应用领域也越来越广,机器人在非结构环境中具有较强的适应能力,特别根据不同动物的结构进行方正。现有的很多仿生机器人基本都是属于工业上的产品,直接使用在各个领域,但是目前拥有学习,供初学生学习的机器人结构还比较少,孩子对仿生机器人的认识比较少,同时由于现有在应用的机器人的结构比较大,不方便供初学者学习使用,同时成本较高,因此需要设计一种结构较小,同时能够供学习者进行学习的仿生机器人。
技术实现思路
1、本实用新型的目的在于提供一种蜘蛛仿生机器人,解决现有仿生机器人结构较大,价格较贵,同时没有留有供学习者学习接口的技术问题。
2、以蜘蛛为原型设计开发一款克兰连杆机构的益智仿生机器人。该款益智蜘蛛仿生机器人可以用于兴趣教育和益智教育课程的推广。以提升青少年对科学知识的认识,培养青少年对科技活动的兴趣与爱好,提高青少年的动手制作能力,开拓青少年的科技创新思维。
3、我们借鉴的自然界当中昆虫的运动原理。生物界蜘蛛的特点是拥有8条腿。在行走时,总会有4条腿着地,用以保持自身的平衡。其每个行为和运动都要依靠腿部的运动来实现,因此这对腿部的灵活度要求较高。动物经过长期的土壤生活进化拥有了很强的挖掘功能他们的外观形状和其在挖掘过程中所表现出来的力学性能给人们提供了参考。
4、为了实现上述目的,本实用新型采用的技术方案如下:
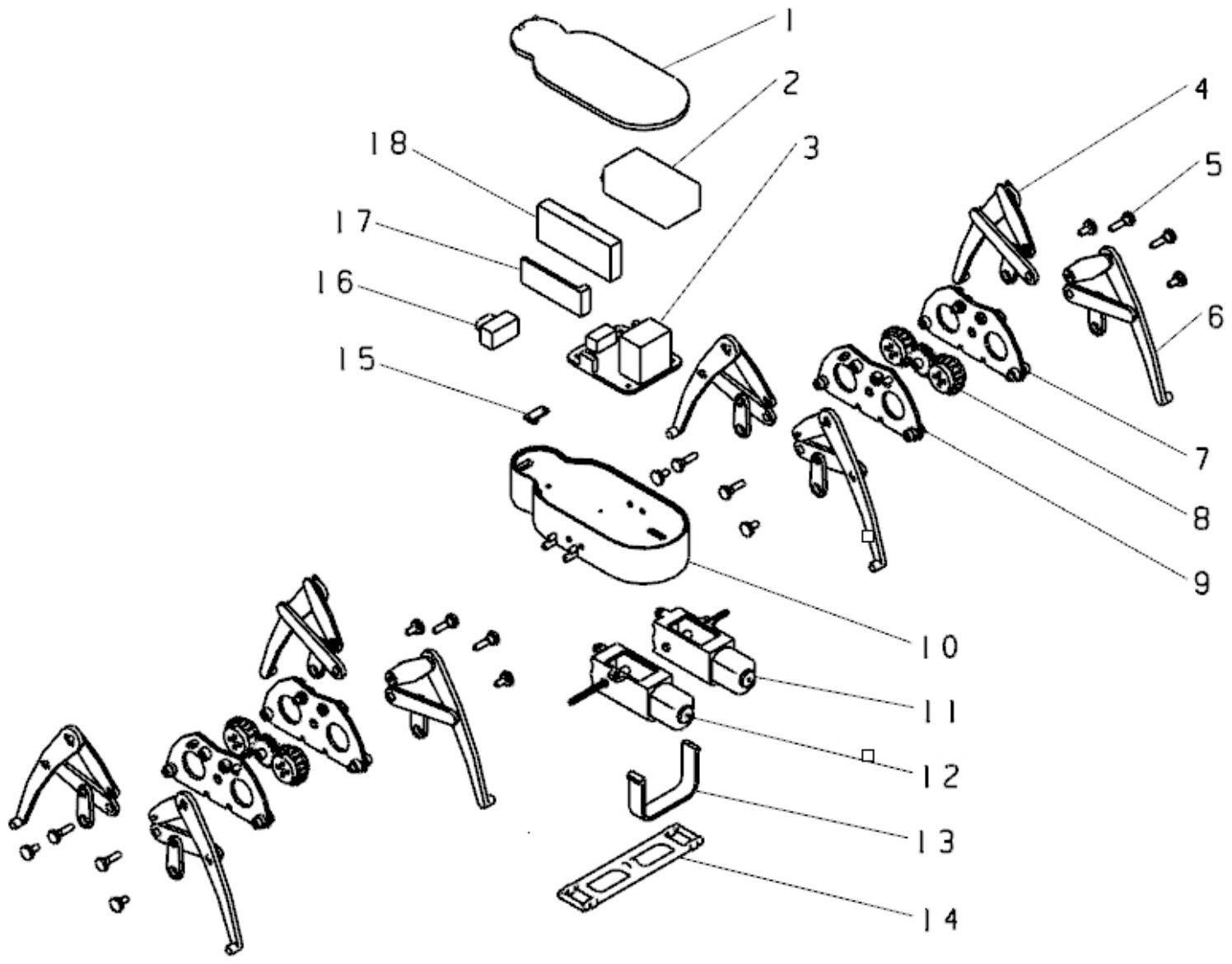
5、一种蜘蛛仿生机器人,包括充电电池、控制器模块、行走装置、底盒和电机组,充电电池和控制器模块设置在底盒内,行走装置设置在底盒的两侧,电机组设置在底盒的底部,并与行走装置转动连接,行走装置包括前行走机构、紧固螺钉、后行走机构、齿轮盖和传动齿轮,传动齿轮与电机组的转轴连接,齿轮盖盖合在传动齿轮的侧边,前行走机构和后行走机构通过紧固螺钉设置在齿轮盖上,并与传动齿轮连接。
6、进一步地,齿轮盖包括右侧齿轮盖和左侧齿轮盖,右侧齿轮盖和左侧齿轮盖设置在传动齿轮的两侧,右侧齿轮盖和左侧齿轮盖的两侧均设置有前行走机构和后行走机构,传动齿轮包括转动齿轮和两个从动齿轮,两个从动齿轮均与转动齿轮齿合设置,分别设置在转动齿轮前后两端,前行走机构通过转轴与前端的从动齿轮连接,后行走机构通过转轴与后端的从动齿轮连接。
7、进一步地,电机组包括第一电机组和第二电机组,底盒内设置有电机驱动模块,控制器模块通过电机驱动模块分别与第一电机组和第二电机组连接。
8、进一步地,第一电机组和第二电机组的底部设置有电机固定扣,电机固定扣与底盒连接固定第一电机组和第二电机组,
9、进一步地,底盒的底部设置有固定桥,固定桥的两端与设置在底盒两侧的行走装置固定连接。
10、进一步地,底盒的顶部设置有盖板,底盒内设置有电源开关、摄像头和蓝牙模块,电源开关设置在控制器模块与充电电池之间,并伸出底盒外,摄像头和蓝牙模块均与控制器模块连接,摄像头伸出底盒的前端。
11、本实用新型由于采用了上述技术方案,具有以下有益效果:
12、本实用新型通过设置行走机构模仿蜘蛛脚,使得在行走的过程更加的稳定,两边设置双层的行走机构,在行走的过程中更加的稳定,同时该机器人结构小,造价便宜,符合学习者学习需要,同时控制器模块设置有调试接口,用户可以随时进行对行走进行调试控制,通过动手组装和编程实践发掘青少年的逻辑思维能力,以寓教于乐的新型教育模式培养青少年对科技活动的兴趣与爱好,提升青少年对科学知识的认识,提高青少年的动手制作能力,开拓青少年的科技创新思维。
技术特征:
1.一种蜘蛛仿生机器人,其特征在于:包括充电电池(2)、控制器模块(3)、行走装置、底盒(10)和电机组,充电电池(2)和控制器模块(3)设置在底盒(10)内,行走装置设置在底盒(10)的两侧,电机组设置在底盒(10)的底部,并与行走机构转动连接,行走装置包括前行走机构(4)、紧固螺钉(5)、后行走机构(6)、齿轮盖和传动齿轮(8),传动齿轮(8)与电机组的转轴连接,齿轮盖盖合在传动齿轮(8)的侧边,前行走机构(4)和后行走机构(6)通过紧固螺钉(5)设置在齿轮盖上,并与传动齿轮(8)连接。
2.根据权利要求1所述的一种蜘蛛仿生机器人,其特征在于:齿轮盖包括右侧齿轮盖(7)和左侧齿轮盖(9),右侧齿轮盖(7)和左侧齿轮盖(9)设置在传动齿轮(8)的两侧,右侧齿轮盖(7)和左侧齿轮盖(9)的两侧均设置有前行走机构(4)和后行走机构(6),传动齿轮(8)包括转动齿轮和两个从动齿轮,两个从动齿轮均与转动齿轮齿合设置,分别设置在转动齿轮前后两端,前行走机构(4)通过转轴与前端的从动齿轮连接,后行走机构(6)通过转轴与后端的从动齿轮连接。
3.根据权利要求1所述的一种蜘蛛仿生机器人,其特征在于:电机组包括第一电机组(11)和第二电机组(12),底盒(10)内设置有电机驱动模块(18),控制器模块(3)通过电机驱动模块(18)分别与第一电机组(11)和第二电机组(12)连接。
4.根据权利要求3所述的一种蜘蛛仿生机器人,其特征在于:第一电机组(11)和第二电机组(12)的底部设置有电机固定扣(13),电机固定扣(13)与底盒(10)连接固定第一电机组(11)和第二电机组(12)。
5.根据权利要求1所述的一种蜘蛛仿生机器人,其特征在于:底盒(10)的底部设置有固定桥(14),固定桥(14)的两端与设置在底盒(10)两侧的行走装置固定连接。
6.根据权利要求1所述的一种蜘蛛仿生机器人,其特征在于:底盒(10)的顶部设置有盖板(1),底盒(10)内设置有电源开关(15)、摄像头(16)和蓝牙模块(17),电源开关(15)设置在控制器模块(3)与充电电池(2)之间,并伸出底盒(10)外,摄像头(16)和蓝牙模块(17)均与控制器模块(3)连接,摄像头(16)伸出底盒(10)的前端。
技术总结
本技术提供一种蜘蛛仿生机器人,属于机器人技术领域,包括充电电池、控制器模块、行走机构、底盒和电机组,充电电池和控制器模块设置在底盒内,行走机构设置在底盒的两侧,电机组设置在底盒的底部,并与行走机构转动连接,行走机构包括前行走机构、紧固螺钉、后行走机构、齿轮盖和传动齿轮,传动齿轮与电机组的转轴连接,齿轮盖盖合在传动齿轮的侧边。本技术通过设置行走机构模仿蜘蛛脚,使得在行走的过程更加的稳定,两边设置双层的行走机构,在行走的过程中更加的稳定,同时该机器人结构小,造价便宜,符合学习者学习需要,同时控制器模块设置有调试接口,用户可以随时进行对行走进行调试控制。
技术研发人员:江健,殷艳萍,廖璇,梁恩义,陈耀能,廖隽琳
受保护的技术使用者:广西机电职业技术学院
技术研发日:20221020
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!