一种EPS系统的异常确定方法、装置、设备、介质及车辆与流程
本公开涉及车辆转向控制,尤其涉及一种eps系统的异常确定方法、装置、设备、介质及车辆。
背景技术:
1、电动助力转向(electric power steering,eps)系统通常用于为车辆提供辅助扭矩的动力,保证行驶的轻便性和高速行驶的稳定性。其中,车辆的eps系统通常设置在发动机舱,其工作环境恶劣,长期暴漏在高温、高热、涉水等环境,易使得eps系统发生异常(如使得eps系统的齿条摩擦力变大),进而导致eps系统的助力能力减弱,可能会导致无助力,则会存在巨大的安全隐患。
2、相关技术中,均是当eps系统已经发生了异常,eps系统才会提示(如语音提示和/或亮灯提示)驾驶员eps系统发生异常以进行异常排查和维修处理,安全隐患较大。而目前并不存在一种预判eps系统发生异常的方法。因此,亟需一种eps系统的异常确定方法,用于预判eps系统是否会发生异常,以提前规避eps系统异常。
技术实现思路
1、为了解决上述技术问题,本公开提供了一种eps系统的异常确定方法、装置、设备、介质及车辆。
2、为了实现上述目的,本公开提供技术方案如下:
3、第一方面,本公开提供一种eps系统的异常确定方法,所述方法包括:
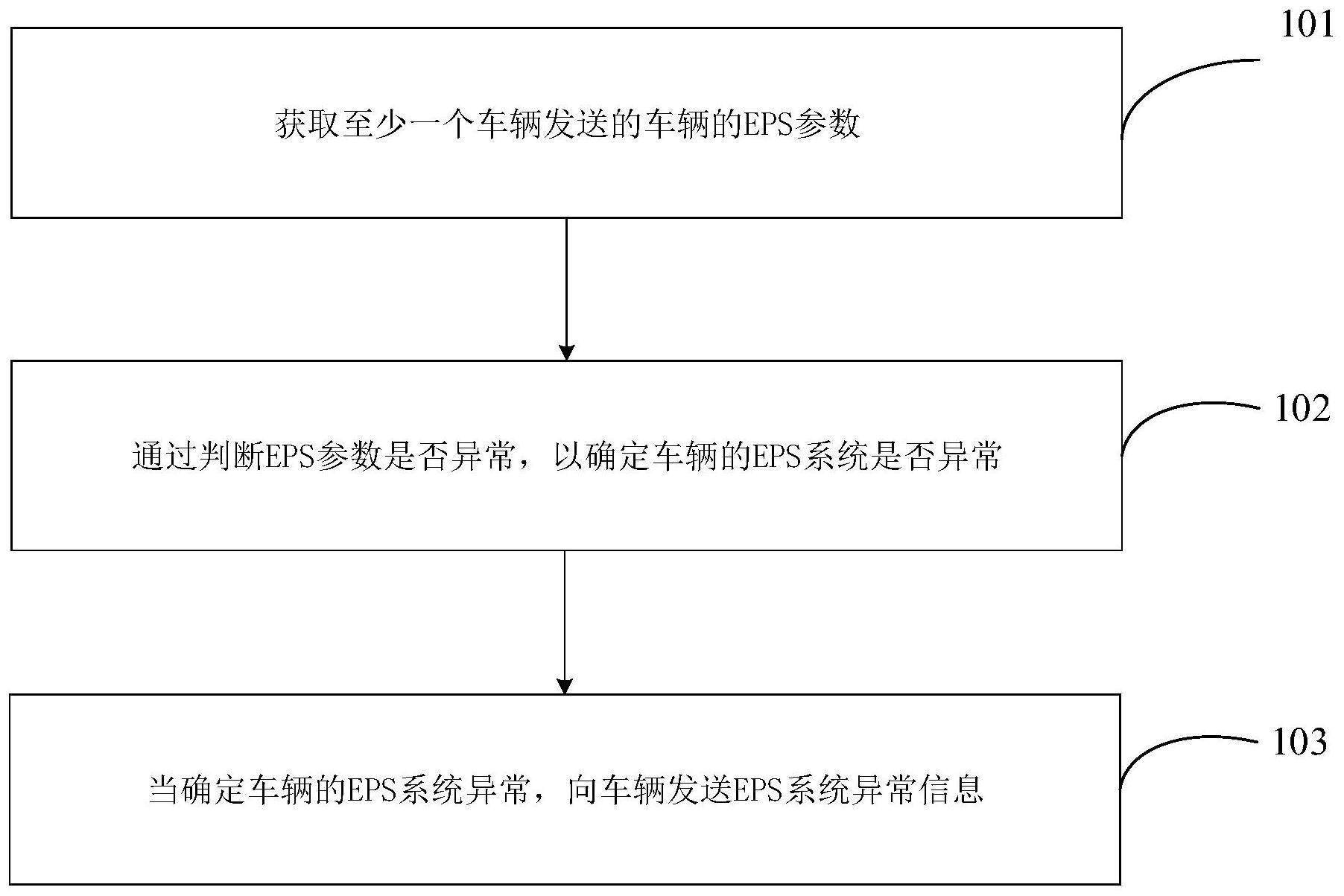
4、获取至少一个车辆发送的所述车辆的eps参数;
5、通过判断所述eps参数是否异常,以确定所述车辆的eps系统是否异常;
6、当确定所述车辆的eps系统异常,向所述车辆发送eps系统异常信息。
7、在一些可实施的示例中,通过判断所述eps参数是否异常,以确定所述车辆的eps系统是否异常,包括:
8、当所述车辆的eps参数满足预设条件,基于所述车辆的车辆识别码vin获取所述车辆的行车数据,其中,所述预设条件用于确定所述车辆的eps参数是否存在异常;
9、通过确定所述车辆的行车数据是否异常以确认所述eps系统是否存在异常。
10、在一些可实施的示例中,所述eps参数包括以下至少一种:
11、转向扭矩;
12、转向角度的变化值;
13、所述预设条件包括:
14、所述转向扭矩大于或等于第一阈值,且所述转向扭矩大于或等于第一阈值的历史出现次数超过预设次数、持续时长超过预设时长;
15、和/或,
16、所述转向角度的变化值小于第二阈值。
17、第二方面,本公开提供一种eps系统的异常确定方法,所述方法包括:
18、确定所述车辆的eps参数;
19、向云端服务器发送所述eps参数,以使所述云端服务器通过判断所述eps参数是否异常,以确定所述车辆的eps系统是否异常;
20、接收所述云端服务器确定所述车辆的eps系统异常时发送的eps系统异常信息,并通过判断所述车辆的行驶速度与预设速度的大小关系来确定是否启动目标助力模式,所述目标助力模式包括:所述eps系统的助力不随车速的变化而变化。
21、在一些可实施的示例中,所述通过判断所述车辆的行驶速度与预设速度的大小关系来确定是否启动目标助力模式,包括:
22、当所述车辆的行驶速度小于或等于预设速度,不启动目标助力模式;
23、当所述车辆的行驶速度大于预设速度,设置预设计数值,并计算所述车辆转向和/或换向时所述eps系统的实际齿条摩擦力;
24、当所述实际齿条摩擦力与预设摩擦力之间的差值大于或等于第三阈值,对所述预设计数值进行第一更新处理,所述第一更新处理包括:对所述预设计数值加上所述预设步长,或者,当所述实际齿条摩擦力与预设摩擦力之间的差值小于第三阈值,对所述预设计数值进行第二更新处理,所述第二更新处理包括:对所述预设计数值减去所述预设步长,直到所述预设计数值更新至第四阈值时,启动目标助力模式,并在下一点火周期关闭所述目标助力模式。
25、第三方面,本公开提供一种eps系统的异常确定装置,应用于云端服务器,所述装置包括:
26、获取模块,用于获取至少一个车辆发送的所述车辆的eps参数;
27、第一确定模块,用于通过判断所述eps参数是否异常,以确定所述车辆的eps系统是否异常;
28、第一发送模块,用于当确定所述车辆的eps系统异常,向所述车辆发送eps系统异常信息。
29、在一些可实施的示例中,所述第一确定模块还用于:
30、当所述车辆的eps参数满足预设条件,基于所述车辆的车辆识别码vin获取所述车辆的行车数据,其中,所述预设条件用于确定所述车辆的eps参数是否存在异常;
31、通过确定所述车辆的行车数据是否异常以确认所述eps系统是否存在异常。
32、在一些可实施的示例中,所述eps参数包括以下至少一种:
33、转向扭矩;
34、转向角度的变化值;
35、所述预设条件包括:
36、所述转向扭矩大于或等于第一阈值,且所述转向扭矩大于或等于第一阈值的历史出现次数超过预设次数、持续时长超过预设时长;
37、和/或,
38、所述转向角度的变化值小于第二阈值。
39、第四方面,本公开提供一种eps系统的异常确定装置,应用于车辆,所述装置包括:
40、第二确定模块,用于确定所述车辆的eps参数;
41、第二发送模块,用于向云端服务器发送所述eps参数,以使所述云端服务器通过判断所述eps参数是否异常,以确定所述车辆的eps系统是否异常;
42、处理模块,用于接收所述云端服务器确定所述车辆的eps系统异常时发送的eps系统异常信息,并通过判断所述车辆的行驶速度与预设速度的大小关系来确定是否启动目标助力模式,所述目标助力模式包括:所述eps系统的助力不随车速的变化而变化。
43、在一些可实施的示例中,所述处理模块还用于:
44、当所述车辆的行驶速度小于或等于预设速度,不启动目标助力模式;
45、当所述车辆的行驶速度大于预设速度,设置预设计数值,并计算所述车辆转向和/或换向时所述eps系统的实际齿条摩擦力;
46、当所述实际齿条摩擦力与预设摩擦力之间的差值大于或等于第三阈值,对所述预设计数值进行第一更新处理,所述第一更新处理包括:对所述预设计数值加上所述预设步长,或者,当所述实际齿条摩擦力与预设摩擦力之间的差值小于第三阈值,对所述预设计数值进行第二更新处理,所述第二更新处理包括:对所述预设计数值减去所述预设步长,直到所述预设计数值更新至第四阈值时,启动目标助力模式,并在下一点火周期关闭所述目标助力模式。
47、第五方面,本公开提供一种电子设备,包括:存储器和处理器,存储器用于存储计算机程序;处理器用于在执行计算机程序时,使得电子设备实现如上述第一方面或第二方面提供的eps系统的异常确定方法。
48、第六方面,本公开提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,当计算机程序被计算设备执行时,使得计算设备实现如上述第一方面或第二方面提供的eps系统的异常确定方法。
49、第七方面,本公开提供一种计算机程序产品,当计算机程序产品在计算机上运行时,使得计算机执行如第一方面或第二方面的设计方式的eps系统的异常确定方法。
50、第八方面,本公开提供一种车辆,其特征在于,包括如第四方面提供的eps系统的异常确定装置,或者如第五方面提供的电子设备。
51、需要说明的是,上述计算机指令可以全部或者部分存储在第一计算机可读存储介质上。其中,第一计算机可读存储介质可以与eps系统的异常确定装置的处理器封装在一起的,也可以与eps系统的异常确定装置的处理器单独封装,本公开对此不作限定。
52、本公开中第三方面至第八方面的描述,可以参考第一方面和第二方面的详细描述;并且,第三方面至第八方面的描述的有益效果,可以参考第一方面的有益效果分析,此处不再赘述。
53、在本公开中,上述eps系统的异常确定装置的名字对设备或功能模块本身不构成限定,在实际实现中,这些设备或功能模块可以以其他名称出现。只要各个设备或功能模块的功能和本公开类似,属于本公开权利要求及其等同技术的范围之内。
54、本公开的这些方面或其他方面在以下的描述中会更加简明易懂。
55、本公开提供的技术方案与现有技术相比具有如下优点:
56、本公开可以确定eps系统的异常,并执行对应的策略,避免由于eps系统异常而引起的行车风险,确保了行车安全。
- 还没有人留言评论。精彩留言会获得点赞!