一种全R副三阶四面体移动机器人
本发明涉及一种全r副三阶四面体移动机器人,本发明可用于侦察、探测等领域。
背景技术:
1、现有全转动副四面体移动机器人机构自由度数目较少,变形能力单一,无法实现非碰撞连续移动步态,在移动过程中,地面对机器人的冲击较大,影响机器人整体使用寿命。在现有基础全转动副四面体的基础上升高四面体阶数,增加了转动副数量进而增加了机构自由度数目,使其具备更加丰富的变形能力和移动步态,可以适应更多的复杂地形。
2、中国专利申请cn201810286062公开一种二自由度四面体移动机器人。该机器人由四个顶点和六条支链构成四面体状的空间机构,其通过六个舵机控制机器人的变形翻转,实现移动。
3、中国专利申请cn114589717a公开一种三棱柱多面体移动机器人。该机器人由六个顶点和九条支链构成三棱柱状的空间机构,其通过控制舵机的正、反转驱动支链内翻、外翻达到三棱柱机器人的变形及移动目的。
技术实现思路
1、本发明要解决的技术问题:在现有四面体移动机器人的研究基础上,通过对基础低阶四面体进行升阶优化,在仅使用转动副的情况下,不但可以保证四面体移动机器人的刚性,同时增加了四面体移动机器人的自由度数目,使机器人可以实现非碰撞连续移动的能力。
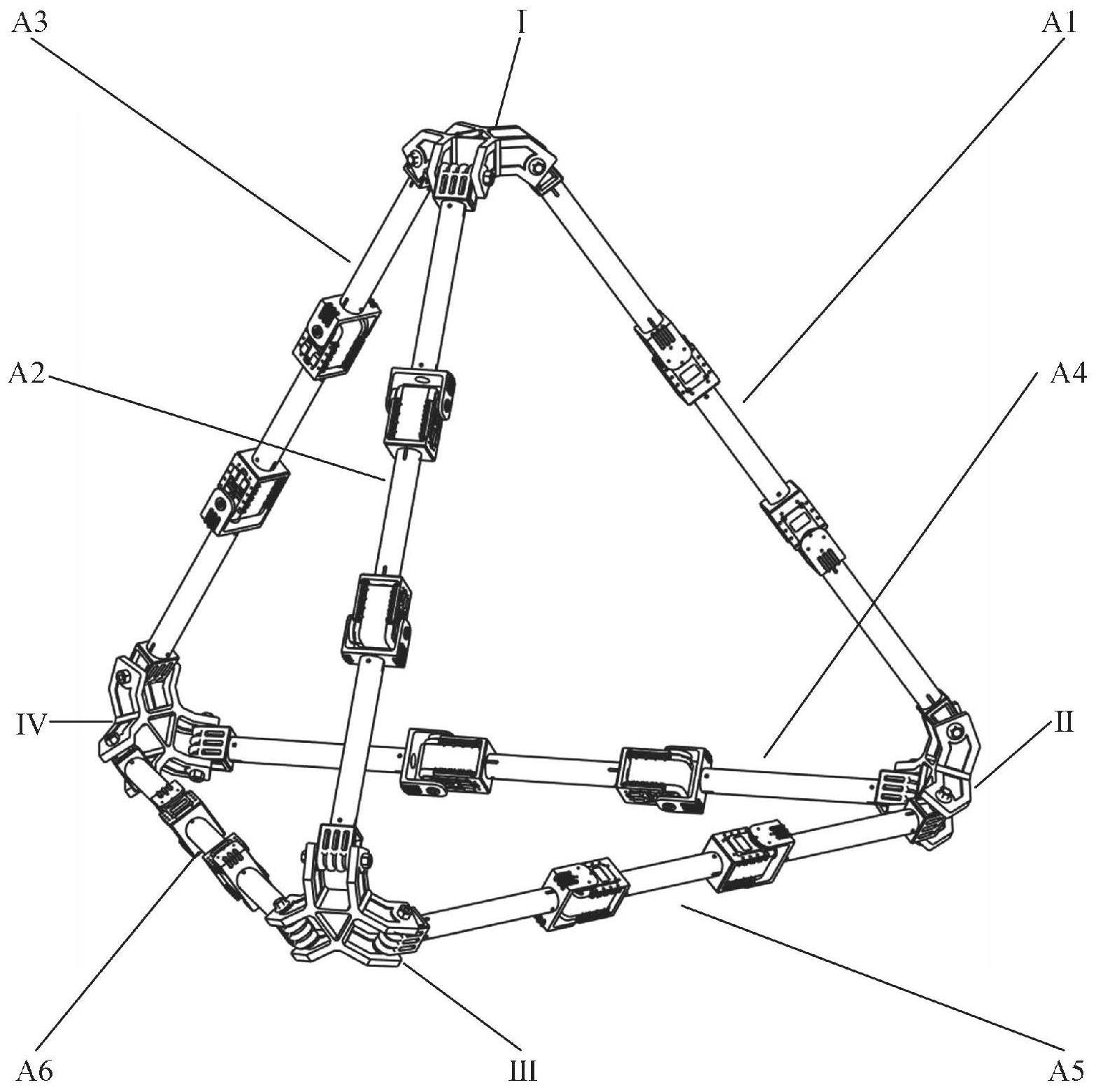
2、本发明的技术方案:一种全r副三阶四面体移动机器人,其特征在于:该全r副三阶四面体移动机器人包括第一顶点、第二顶点、第三顶点、第四顶点,第一支链、第二支链、第三支链、第四支链、第五支链、第六支链。
3、第一顶点为一体式顶点,其主体外观为3个u型凹槽呈圆周等分状,凹槽内开有转动副通孔,通孔轴线均位于同一平面,且共面夹角为60°;所述第二顶点、第三顶点、第四顶点的结构与第一顶点结构尺寸均相同。
4、第一支链由支链顶点连接块、支链长管、支链主动舵机架、支链被动舵机架、支链短管组成;支链两端关于支链短管对称布置;支链共四个转动副,支链上所有转动副均互相平行。
5、所述的第二支链、第三支链、第四支链、第五支链、第六支链与第一支链的结构尺寸均相同。
6、顶点与支链的连接关系为:
7、第一顶点上三个转动副通孔分别与第一支链、第二支链、第三支链的任意一端通过转动副连接;
8、第二顶点上三个转动副通孔分别与第一支链、第四支链、第五支链的任意一端通过转动副连接;
9、第三顶点上三个转动副通孔分别与第二支链、第五支链、第六支链的任意一端通过转动副连接;
10、第四顶点上三个转动副通孔分别与第三支链、第四支链、第六支链的任意一端通过转动副连接。
11、第一顶点包括通孔、轴承孔;其中通孔用于与支链顶点连接块通过螺栓进行转动副连接;轴承孔用于安置与螺栓匹配的轴承,使转动更灵活,其余未描述的不规则沟槽均为第一顶点减轻重量所需,无连接或其他作用。
12、第一支链由支链顶点连接块、支链长管、支链主动舵机架、支链被动舵机架、支链短管组成;其中支链顶点连接块设有用于与第一顶点通过螺栓进行转动副连接的支链顶点连接块第一通孔,用于与支链长管通过螺栓连接固定的支链顶点连接块第二通孔;支链长管设有用于与支链顶点连接块通过螺栓连接固定的支链长管第一通孔,用于与支链顶点连接块进行嵌合周向定位的支链长管第一卡槽,用于与支链主动舵机架通过螺栓连接固定的支链长管第二通孔,用于与支链主动舵机架进行嵌合周向定位的支链长管第二卡槽,其中支链长管第一通孔和支链长管第二通孔的轴线与支链长管第一卡槽和支链长管第二卡槽的开口平面呈90°夹角;支链主动舵机架设有用于与支链长管通过螺栓连接固定的支链主动舵机架第一通孔,用于与舵机机体通过螺钉连接固定的支链主动舵机架第二通孔,用于与舵机输出轴通过螺钉进行转动副连接的支链主动舵机架第三通孔,用于加强支链主动舵机架结构强度的筋结构;支链被动舵机架设有用于与舵机机体通过螺钉连接固定的支链被动舵机架第一通孔,用于与支链短管通过螺栓连接固定的支链被动舵机架第二通孔;支链短管设有用于与支链被动舵机架通过螺栓连接固定的支链短管第一通孔,用于与支链被动舵机架进行嵌合周向定位的支链短管第一卡槽,支链短管两侧连接的均是支链被动舵机架,两侧连接方式和连接孔位均相同,其中支链短管第一通孔轴线与支链短管第一卡槽的开口平面呈90°夹角;通过上述连接后,第一支链可通过舵机驱动进行灵活转动变形,同时也可绕第一顶点进行内外旋转。
13、本发明的有益效果:
14、本发明所述的四面体移动机器人的机构自由度为8,机构均采用转动副连接,通过12个舵机进行冗余驱动控制,使该机器人结构具有刚性大,承载负荷高的优点。该机构的主体结构设计同时符合模块化要求,便于拆卸安装和生产。
技术特征:
1.一种全r副三阶四面体移动机器人,其特征在于:该全r副三阶四面体移动机器人包括第一顶点(ⅰ)、第二顶点(ⅱ)、第三顶点(ⅲ)、第四顶点(ⅳ),第一支链(a1)、第二支链(a2)、第三支链(a3)、第四支链(a4)、第五支链(a5)、第六支链(a6);
2.根据权利要求1所述的一种全r副三阶四面体移动机器人,其特征在于:
3.根据权利要求1所述的一种全r副三阶四面体移动机器人,其特征在于:
技术总结
本发明公开了一种全R副三阶四面体移动机器人,包括第一至第四顶点、第一至第六支链。第一顶点与第一支链、第二支链、第三支链连接;第二顶点与第一支链、第四支链、第五支链连接;第三顶点与第二支链、第五支链、第六支链连接;第四顶点与第三支链、第四支链、第六支链连接;完成上述连接机器人呈现正四面体组合外形。该全R副三阶四面体移动机器人增加了转动副关节和四面体阶数,可使所述全R副三阶四面体移动机器人增加更多自由度,可以获得更多的变形姿态,进而实现连续非碰撞的移动步态,提高了机器人适应复杂地形的能力,本发明可用于侦察、探测等领域。
技术研发人员:刘然,刘秉昕,姚燕安,唐己明,苑晓晨
受保护的技术使用者:北京交通大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!