一种蛙机器人及其实现的多姿态运动控制方法
本发明涉及一种仿生机器人,具体涉及一种蛙机器人及其实现的多姿态运动控制方法。
背景技术:
1、随着目前人类对一些可用于勘探侦查、抢险救灾、探索救援等机器人的研究,一些非结构化地形和未知环境作业也给机器人的运动带来了很大困难。青蛙作为出色的跳跃者,拥有高效的弹跳力和优秀的机动性。通过模仿青蛙的跳跃能力和运动方式可以实现高效的跳跃,能够在复杂的地形中快速移动和跨越障碍物。而青蛙在生态和行为上有异于青蛙,它们通常在树上生活,有更加强大的腿部肌肉和发达的脚蹼,因此其具有更好地跳跃能力和滑翔能力。它们从树上跳跃下来的时候会展开它们的腿部和脚蹼,增加空气阻力,从而滑翔更多的距离,平稳落地。
2、而目前研究仿青蛙跳跃机器人通常采用气动肌肉和关节串联式驱动,这类机器人较为笨重,也忽略了仿生学性和青蛙在跳跃过程中的空气阻力,同时目前仿青蛙跳跃机器人缺少能够在天空滑翔,在短时间内飞行与跳跃交替进行的运动性能,难以适配复杂地形或恶劣环境下减少踩踏点快速穿过的工况。
3、因此,充分利用仿生性和空气阻力,设计一种可张开的腿部和脚蹼,在跳跃的基础上实现滑翔的仿蛙机器人,有利于应对一些复杂的地形和跳跃,也更具仿生性。
技术实现思路
1、为克服现有技术所存在的缺陷,现提供一种蛙机器人及其实现的多姿态运动控制方法,以解决上述问题。
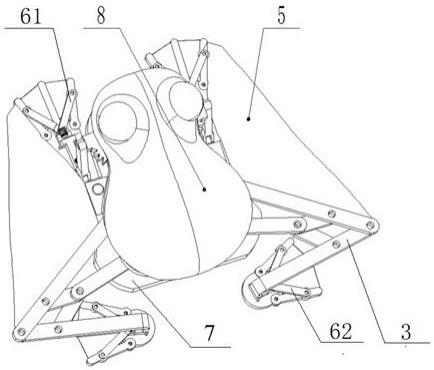
2、一种蛙机器人,包括前置转向机构、两个前肢连杆、两个后肢连杆、势能储放机构、两个蝙膜片、两个前脚蹼件、两个后脚蹼件、主体躯干、外壳和两个后蹼膜片,所述外壳扣合在主体躯干的顶面上,并与主体躯干之间形成有内腔,前置转向机构和势能储放机构均设置在内腔中;前置转向机构和势能储放机构分别设置主体躯干的前端顶面和后端顶面上,两个前肢连杆分别设置在主体躯干前端的两侧,每个前肢连杆的上端与前置转向机构相铰接,每个前肢连杆的下端连接有一个前脚蹼件;两个后肢连杆分别设置在主体躯干后端的两侧,每个后肢连杆的上端与势能储放机构连接,每个后肢连杆的下端设置有一个后脚蹼件,每个后脚蹼件内设置有一个后蹼膜片;所述每个前脚蹼件与其处于主体躯干同侧的后肢连杆之间穿设有一个蝙膜片;两个前脚蹼件、两个后脚蹼件、两个前肢连杆、两个后肢连杆、两个蝙膜片和两个后蹼膜片在前置转向机构和势能储放机构的控制下做出缩腿蓄力、弹跳、上移和/或滑移动作。
3、作为优选方案:两个前脚蹼件和两个后脚蹼件的结构相同;每个前脚蹼件包括中趾、两个小趾、两根连杆、脚蹼底座、磁片、铁环固定件、脚蹼压缩弹簧、线圈、线圈固定环和限位挡块,所述脚蹼底座为圆台体,脚蹼底座上加工有第一条形豁口,中趾的一端滑动设置在第一条形豁口内,中趾的另一端沿着脚蹼底座的径向方向进行延伸,两个小趾对称设置在中趾的两侧,每个小趾的一端铰接在脚蹼底座上,每个小趾的另一端水平进行延伸,并与中趾处于同一水平面上;所述中趾和每个小趾之间设置有一根连杆,两根连杆的一端同轴铰接在中趾靠近脚蹼底座的一端上,两根连杆的另一端分别铰接在其靠近的小趾上;蝙膜片的一端固定连接在靠近主体躯干的小趾上,蝙膜片的另一端依次穿过中趾、远离主体躯干的小趾后,与其同侧的后肢连杆的外壁相连接,所述的限位挡块设置在脚蹼底座上并处于第一条形豁口远离中趾的一侧,限位挡块内设置有线圈固定环,线圈固定环上缠绕设置有线圈,磁片竖直设置在两根连杆中处于上方的一根连杆的顶面上,磁片朝向线圈固定环的一侧设置有铁环固定件,铁环固定件和线圈之间设置有脚蹼压缩弹簧,通过脚蹼压缩弹簧的伸缩实现前脚蹼件的张开与聚拢。
4、作为优选方案:每个后脚蹼件的中趾和两个小趾之间穿设有一个所述后蹼膜片,每个后脚蹼件的限位挡块处插有一个球铰支座,后肢连杆与限位挡块之间通过球铰支座进行铰连接,以实现青蛙任意姿态时两个前脚蹼件和两个后脚蹼件的脚掌均可完全接触地面。
5、作为优选方案:每个前肢连杆包括前肢大腿、前肢压缩弹簧和前肢小腿,前肢小腿的一端与其对应的前脚蹼件中的限位挡块的顶端固定连接,前肢小腿的另一端与前肢大腿的下端相铰接,前肢大腿的上端铰接在前置转向机构的其中一个输出端上;所述前肢压缩弹簧的一端连接在前肢大腿上,另一端连接在前肢小腿上,并处于前肢大腿和前肢小腿朝向前脚蹼件的一侧。
6、作为优选方案:所述前置转向机构包括左不完全齿轮、主动齿轮、从动齿轮、右不完全齿轮、舵机和舵盘,左不完全齿轮和右不完全齿轮并排铰接在主体躯干的顶面上,左不完全齿轮和右不完全齿轮之间设置有主动齿轮和从动齿轮,主动齿轮与从动齿轮相啮合,主动齿轮与其靠近的左不完全齿轮相啮合,从动齿轮与其靠近的右不完全齿轮相啮合,主动齿轮上同轴连接有舵盘,舵盘上设置有舵机,两个前肢连杆分别铰接在各自对应的左不完全齿轮和右不完全齿轮上,两个前肢连杆在舵机的驱动下通过左不完全齿轮、主动齿轮、从动齿轮和右不完全齿轮的配合下做出相对靠拢或相对展开动作。
7、作为优选方案:所述势能储放机构包括两个势能储放单体,两个势能储放单体并排设置在主体躯干的顶面上,每个势能储放单体包括电机、小不完全齿轮,恒力弹簧片、内齿轮、轴承、第一轴体、第二轴体和直线轴承,所述第一轴体和第二轴体竖直并列设置在主体躯干上,第二轴体靠近主体躯干的前端设置,直线轴承套装在第二轴体上;第一轴体靠近主体躯干的后端设置,所述的内齿轮和轴承由上至下同轴套在第一轴体上,后肢连杆的动力输入端套装在轴承的外圈上,并与内齿轮固定连接,所述的小不完全齿轮与内齿轮啮合配合,小不完全齿轮上同轴设置有电机;所述恒力弹簧片的一端缠绕在直线轴承上,恒力弹簧片的另一端固定在内齿轮的外环壁上。
8、作为优选方案:每个后肢连杆包括第一连杆、第二连杆、第三连杆、后肢小腿、后肢大腿和踝关节,第一连杆的一端铰接在其靠近的第二轴体上,第一连杆的另一端与后肢小腿的一端相铰接,后肢小腿的另一端通过踝关节与后脚蹼件上的球铰支座进行铰连接,第二连杆的一端和第三连杆的一端同轴铰接在后肢大腿的一端上,第二连杆的另一端铰接在第一连杆上,第三连杆的另一端铰接在后肢小腿上,后肢大腿的另一端作为动力输入端套装在轴承上并与内齿轮固定连接。
9、一种蛙机器人实现的多姿态运动控制方法,所述多姿态运动控制方法为两个前脚蹼件、两个后脚蹼件、两个前肢连杆、两个后肢连杆、两个蝙膜片和两个后蹼膜片在前置转向机构和势能储放机构的控制下做出缩腿蓄力、弹跳、上移和滑移的连续动作,缩腿蓄力、弹跳、上移和滑移动作之间形成一个标准动作姿态转换过程,多个标准动作姿态转换过程往复循环形成连续跳跃行进过程,具体为:
10、s1,准备阶段:所述的蛙机器人处于趴伏状态,两个前脚蹼件和两个后脚蹼件与趴伏点接触,且两个前脚蹼件和两个后脚蹼件处于展开的状态,以保证稳定的趴伏状态;势能储放机构中的小不完全齿轮与内齿轮处于脱齿状态;恒力弹簧片缠绕在直线轴承上,并处于自由伸缩状态;前肢大腿和前肢小腿的连接处为关节结构,并用前肢压缩弹簧实现定性,并可通过改变前肢压缩弹簧的长度改变青蛙弹跳的角度;后肢小腿在脚踝处通过球铰链和后脚蹼件连接,保证四个脚蹼件与地面平稳接触;
11、s2,缩腿储能阶段:所述势能储放机构中的两个电机通过小不完全齿轮反向驱动两个内齿轮,并使得两根恒力弹簧片从直线轴承上拉出,并缠绕在各自对应的内齿轮上;同时,两个内齿轮分别带动与其连接的后肢大腿背向转动,后肢大腿通过第一连杆、第二连杆和第三连杆带动后肢小腿作出向后肢大腿的方向进行聚拢的动作,直至小不完全齿轮与内齿轮不再啮合驱动,此时后肢连杆变成聚拢压缩状态,恒力弹簧片储存了一定的弹性势能,为蛙机器人弹跳出去做蓄能准备;
12、s3,弹跳瞬间:当两个小不完全齿轮与对应的内齿轮处于脱齿状态时,两根恒力弹簧片由于不受外力作用,开始释放弹性势能,缠绕在直线轴承上,并带动各自连接的内齿轮反向转动,两个内齿轮分别带动两个后肢大腿进行相向转动,后肢大腿通过第一连杆、第二连杆和第三连杆带动后肢小腿作出蹬地的动作,实现蛙机器人的弹跳;
13、s4,上升阶段:蛙机器人在势能储放机构与两个后肢连杆的作用下处于上升阶段时,舵机将旋转的扭矩通过主动齿轮传递给左不完全齿轮、从动齿轮和右不完全齿轮;左不完全齿轮和右不完全齿轮带动与各自连接的两个前肢连杆相向转动,从而带动两个前脚蹼件作出向内聚拢的动作,减小蛙机器人前端与空气的接触面积,减小空气阻力;同时,所述的前脚蹼件和后脚蹼件中的线圈处于上电状态,线圈与磁片克服脚蹼压缩弹簧的弹性而相向吸合,并拉动中趾朝向限位挡块侧移动,中趾通过两根连杆带动两个小趾向内转动,使得两个小趾之间的夹角角度最小,处于前脚蹼件中的蝙膜片处于收缩状态,两个后脚蹼件中的后蹼膜片也处于收缩状态,两侧的蝙膜片面积也降到最小状态,便于蛙机器人的快速上升;
14、s5,滑翔阶段:当蛙机器人处于上升的最高点时,势能储放机构中的两个电机再次通过小不完全齿轮反向驱动两个内齿轮,并使得两根恒力弹簧片再次从直线轴承上拉出,并缠绕在各自对应的内齿轮上;同时,两个内齿轮分别带动与其连接的后肢大腿背向转动,后肢大腿通过第一连杆、第二连杆和第三连杆带动后肢小腿作出向后肢大腿的方向进行聚拢的动作;由于后肢连杆的作用,将主体躯干两侧的蝙膜片展开,增加空气阻力;同时,舵机将旋转的扭矩通过主动齿轮传递给左不完全齿轮、从动齿轮和右不完全齿轮;左不完全齿轮和右不完全齿轮带动与各自连接的两个前肢连杆背向转动,从而带动两个前脚蹼件作出向外展开的动作,使得蝙膜片展开面积达到最大;
15、所述两个前脚蹼件和两个后脚蹼件中的线圈断电,致使线圈与磁片不再吸引,脚蹼压缩弹簧复位,并推动中趾朝向远离限位挡块侧移动,中趾通过两根连杆带动两个小趾向外转动,使得两个小趾之间的夹角角度变大,处于前脚蹼件中的蝙膜片处于展开状态,两个后脚蹼件中的后蹼膜片也处于展开状态;使得蛙机器人与空气的接触面积变大,空气阻力变大,在空中呈现滑翔姿态;
16、s6,落地阶段:在即将要落地前,再次控制舵机反向转动,舵机将旋转的扭矩通过主动齿轮传递给左不完全齿轮、从动齿轮和右不完全齿轮;左不完全齿轮和右不完全齿轮带动与各自连接的两个前肢连杆相向转动,从而带动两个前脚蹼件作出向内聚拢的动作,减小蛙机器人前端与空气的接触面积,减小空气阻力;同时,所述的前脚蹼件和后脚蹼件中的线圈处于上电状态,线圈与磁片克服脚蹼压缩弹簧的弹性而相向吸合,并拉动中趾朝向限位挡块侧移动,中趾通过两根连杆带动两个小趾向内转动,使得两个小趾之间的夹角角度最小,处于前脚蹼件中的蝙膜片处于收缩状态,两个后脚蹼件中的后蹼膜片也处于收缩状态;蛙机器人恢复到弹跳的状态,并为下一次弹跳做准备;如此,便完成了一个周期,要实现连续跳跃,可重复以上动作。
17、本发明的有益效果在于:
18、1、本发明通过前脚蹼件和后脚蹼件的设计,使得蛙机器人在上升阶段时,后蹼膜片以及蝙膜片所展开的面积最小,与空气的阻力最小,最终跳至最高点;在下降滑翔阶段,后蹼膜片以及蝙膜片所展开的面积最大,与空气的阻力最大,增加滑翔距离,更具有仿生性能。
19、2、本发明通过势能储放机构的设置,存储了提供弹跳力的能量,此能量通过后肢连杆及后脚蹼件传递给地面,实现弹跳动作;由于不完全齿轮的设计,还可以实现将弹簧储存的弹性势能在任何需要的时候释放的功能,使机器人具有结构紧凑、控制方便的特点。
20、3、本发明的前肢大腿和前肢小腿的连接处为关节结构,并通过前肢压缩弹簧实现定型,在蛙机器人趴伏在地面上或者树枝上时,可以适应非平整的趴伏点,保证两个前脚蹼件可以始终与地面接触,增加机身的平衡性;同时蛙机器人在降落的瞬间,由于与着陆点之间存在较大的冲击力,前肢大腿、前肢压缩弹簧和前肢小腿可以起到缓冲作用,防止较大的冲击力减小前置转向机构的寿命。同时,可以通过改变前肢压缩弹簧的长度,来改变前肢大腿和前肢小腿之间的夹角角度,进而改变蛙机器人在初始状态或者弹跳前的俯仰角,从而改变蛙机器人弹跳的攻角角度。
21、4、本发明通过前置转向机构、两个前肢连杆、两个后肢连杆、势能储放机构、两个蝙膜片、两个前脚蹼件、两个后脚蹼件、主体躯干、外壳和两个后蹼膜片之间相互配合能够连续跳跃,还能够实现滑翔跳跃交替的运动形式,能够携带探测设备和通信系统的载体,配合滑翔姿态使其跳跃的跨度更大,减少在复杂地形或恶劣环境下经过踩踏点的个数,实现快速穿越的记录过程,为探索复杂地形的相关情况提供有利条件。
- 还没有人留言评论。精彩留言会获得点赞!