一种行星齿轮差速原理的轮足复合机器人腿部结构、轮足复合机器人
本发明涉及一种行星齿轮差速原理的轮足复合机器人腿部结构、轮足复合机器人,属于机器人。
背景技术:
1、近年来,移动机器人逐渐向轮式机器人、履带式机器人以及足式机器人分化。在当下主流研究的三种移动机器人中,轮式机器人具有移动速度快、能源利用率高、续航时间长等优点,但其工作场景十分有限;履带式机器人具有较大的地面接触面积,可以在松软的土地表面进行移动工作,但由于其自身重量原因,移动速度极其缓慢且能量利用率低;足式机器人有较高的机动能力,通过对其步态进行合理的规划,可以适应多种崎岖不平的地形。
2、目前一些资料中也涉及轮足机器人的研究,而轮足式机器人的设计中,腿部结构是至关重要的部分,腿部结构涉及轮式、足式两种运动方式之间的切换,因此使得轮足式机器人单腿电机数量过多,导致机器人单腿结构复杂,如何解决使用较少数量的电机控制较多的运动,仍是一个难题。更进一步地,虽然现有技术也涉及双电机技术,但是足式运动时不能将轮式机构的动力截停,足式运动时依旧存在着轮子空转的现象,能量利用率较低,极大的浪费了能源。因此有必要研究新型轮足切换机器人,为实践提供借鉴和指导。
技术实现思路
1、本发明提供了一种行星齿轮差速原理的轮足复合机器人腿部结构、轮足复合机器人,通过两个动力源首先实现了大腿机构和小腿机构相配合而成的足式运动,同时又实现了足式机器人向轮式机器人的切换过程,最后实现了轮式运动。
2、本发明的技术方案是:
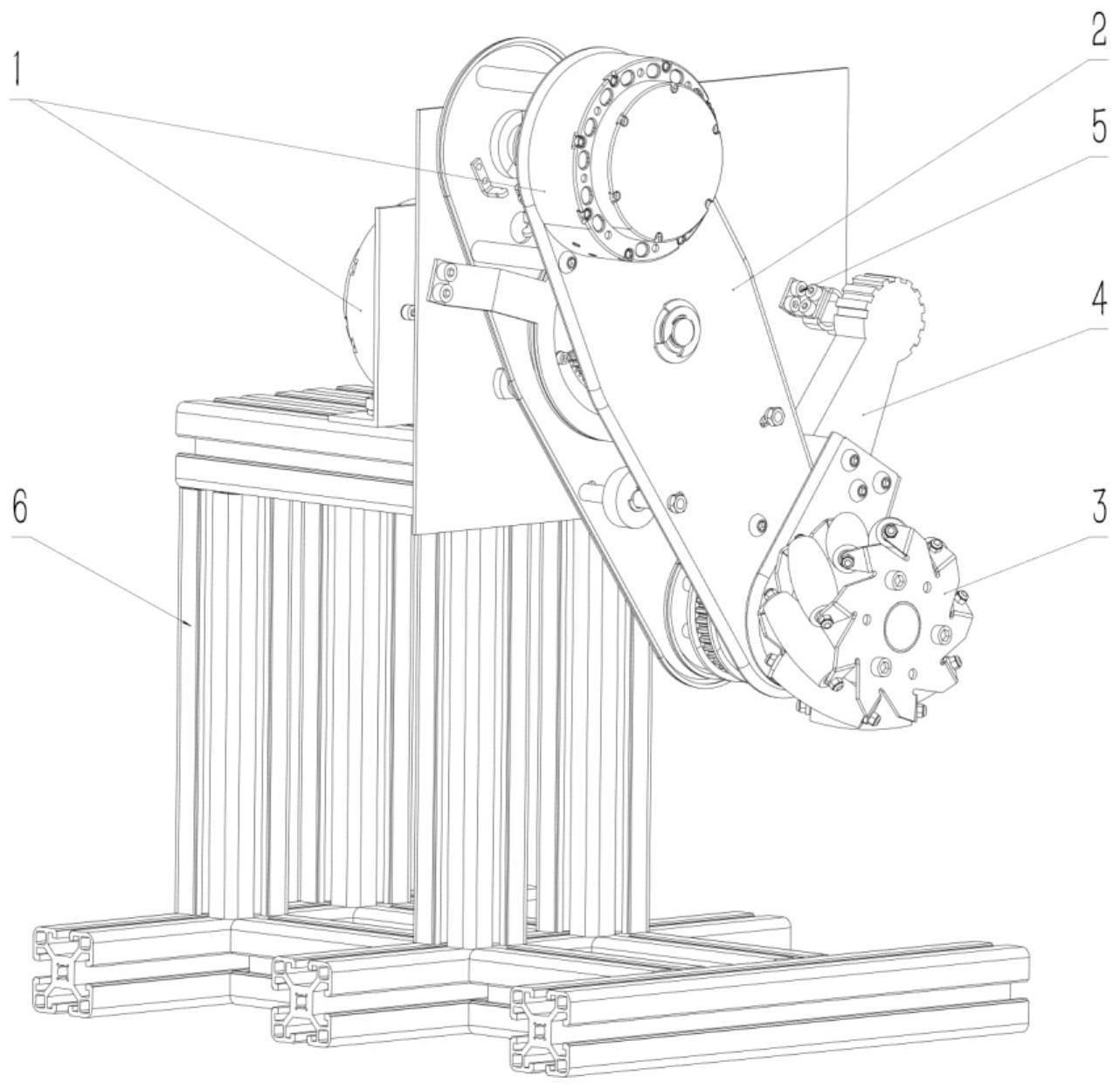
3、根据本发明的一方面,提供了一种行星齿轮差速原理的轮足复合机器人腿部结构,包括动力源模块1、动力切换模块、大腿机构2、轮式机构3、小腿机构4,所述动力源模块1包括第一动力源7、第二动力源9,第二动力源9用于驱动小腿机构4运动;通过动力切换模块实现大腿机构2、轮式机构3的动力切换:足式运动下,大腿机构2获得第一动源7提供的动力,轮式运动下,轮式机构3获得第一动源7提供的动力。
4、所述动力切换模块包括快速触发执行机构13、行星齿轮模块12;其中,快速触发执行机构13安装在大腿机构2上部且与第二动力源9的第二动力源同步转轴10配合,行星齿轮模块12安装在大腿机构2中部且与第一动力源7的第一动力源同步转轴8配合,轮式机构3安装在大腿机构2下部。
5、所述快速触发执行机构13包括销27、拨叉28、滑块29、锁紧杆30、第一铜套31、滑块导杆32、拨叉杠杆33、触发钢球35、第一同步带轮36、圆柱凸轮37、支杆38;其中,圆柱凸轮37、第一同步带轮36与第二动力源同步转轴10连接,第二动力源同步转轴10的动力经第一同步带轮36传输至小腿机构;触发钢球35在圆柱凸轮37槽内,且能沿圆柱凸轮37槽滑动,通过圆柱凸轮37对触发钢球35进行拨动;拨叉杠杆33一端与触发钢球35配合,拨叉杠杆33另一端与拨叉28上部连接,拨叉杠杆33中部开孔,用于安装与大腿内侧板15连接的支杆38,以此形成拨叉杠杆33的支点;滑块29上端开槽,与拨叉28中部安装的销27间隙配合,滑块29中部的通孔与第一铜套31进行过盈配合,再以第一铜套31与固定在大腿机构2的大腿内侧板15、大腿外侧板11之间的滑块导杆32进行间隙配合,用于滑块29沿滑块导杆32上进行滑动,滑块29下端与锁紧杆30固接,通过滑块29带动锁紧杆30运动,实现大腿机构2、轮式机构3的动力切换。
6、所述快速触发执行机构13还包括第一弹簧钣金件16、拉簧26;其中,位于圆柱凸轮37两侧的两个第一弹簧钣金件16与大腿内侧板15连接,且第一弹簧钣金件16自由端与拉簧26一端连接,拨叉28下部两端分别与一拉簧26另一端连接,使拉簧26始终处于拉伸状态。
7、所述行星齿轮模块12包括太阳轮轴40、行星齿轮43、内齿轮圈41、桁架盘50、内螺纹圆柱销54、行星轮内轴承55、外侧轴52、内齿轮连接件42、动力传动件44、第三同步带轮45、圆盘机架67;其中,太阳轮轴40与外侧轴52连接为一个刚性整体轴;刚性整体轴的太阳轮轴40非齿轮端与联轴器25连接,通过联轴器25获取第一动力源7的动力;行星齿轮43与内齿轮圈41相啮合,太阳轮轴40与内齿轮圈41同轴心且太阳轮轴40齿轮部分与行星齿轮43相啮合;桁架盘50与内齿轮圈41同轴心,行星齿轮43中心分别与行星轮内轴承55外圈进行过盈配合,圆柱销54用于连接行星轮内轴承55、桁架盘50、大腿机构2的大腿内侧板15,使行星齿轮43绕着太阳轮轴40转动的时候桁架盘50与之同步转动;内齿轮连接件42与内齿轮圈41另一侧固接,同时内齿轮连接件42与动力传动件44紧固连接,使动力传动件44的转动与内齿轮圈41的转动同步;第三同步带轮45固定在动力传动件44上,使内齿轮圈41的动力能直接输送到第三同步带轮45上;通过快速触发执行机构13中锁紧杆30将内齿轮连接件42与圆盘机架67卡紧,使桁架盘50获得动力并传输至大腿机构2;锁紧杆30将大腿内侧板15与机架板66卡紧,使内齿轮连接件42获得动力并传输至第三同步带轮45,并经第三同步带轮45传输至轮式机构3。
8、所述内齿轮连接件42沿外周设有多个卡孔,所述圆盘机架67上设有插孔,通过锁紧杆30穿过插孔后与卡孔配合,实现卡紧。
9、所述轮式机构3包括膝关节轴20、第四铜套56、第一隔套21、第二隔套58、麦克纳姆轮57、第二同步带轮23、第四同步带轮24;其中,膝关节轴20上安装第二同步带轮23、第四同步带轮24,且端部安装麦克纳姆轮57;动力切换模块的行星齿轮模块12中动力传动件44上的动力通过第三同步带轮45传至第四同步带轮24,通过第四同步带轮24传输至膝关节轴20,再由膝关节轴20直接驱动麦克纳姆轮57;动力切换模块的快速触发执行机构13中第一同步带轮36的动力传输至第四同步带轮24。
10、所述腿部结构还包括安装在机架板66上的悬挂机构5。
11、所述悬挂机构5包括弹簧钣金连接件65、第一弹簧钣金件64;弹簧钣金连接件65一端与机架板66固定,弹簧钣金连接件65另一端与第二弹簧钣金件64一端固定,第二弹簧钣金件64另一开口端用于小腿限位杆61推入/拉出。
12、根据本发明的另一方面,还提供了一种轮足复合机器人,包括机架,所述机架用于安装上述中任意一项所述的腿部结构。
13、本发明的有益效果是:
14、1、轮足复合的形式使机器人有更高的灵活性,首先轮足复合的设计可以使机器人能够在平坦的地面进行稳定而快速的移动,其次它在地形复杂的情况下也能保持更高的机动性、自适应性;轮足复合的设计使机器人有更高的能效比,本发明通过两个动力源共同作用,实现了对大腿机构、轮式机构、小腿机构这三个运动机构的动力输出,相较于市面上的轮足复合式机器人来讲,直接减少了机器人的制作成本其能源利用率得到了极大的提高。
15、2、与前几代的轮足方案相比,本发明利用行星齿轮的差速传动原理,结构简单可靠,同时解决了在足式运动的情况下轮式机构空转的一个情况,使整个机器人的能源利用率得到了更大的一个提升。
16、3、本发明基于行星齿轮的差速传动原理,获得了行星齿轮传动的大传动比,使大腿机构和轮式机构获得了更大的扭矩,能够承受更大的负重,使机器人能够根据不同的任务装配更多的装备和配置,具备更强的适应性和多功能性。
17、综上,本发明相对于市面上传统的轮足复合机器人来讲,实现了以两个动力源对三个运动机构的动力输出;相对于双动力源类型的轮足复合机器人来讲,本发明足式运动时轮式机构不再运动,更有效的节省了能源和保证续航。
- 还没有人留言评论。精彩留言会获得点赞!