一种导流罩系统及其控制方法与流程
本发明涉及汽车车身,特别涉及一种导流罩系统及其控制方法。
背景技术:
1、在车辆高速行驶时,空气阻力是车辆最主要的阻力来源。为了降低高速行驶的空气阻力,提升经济性,轻、中、重卡往往配备有导流罩系统。按照位置不同,可将导流罩系统分为顶导流罩和侧导流罩两部分,然而,作为降低空气阻力部件,导流罩系统必然会对车辆制动性能带来不利影响,增加制动系统负担。在高速行驶中遇到突发情况时,由于阻力减小,会增加车辆的制动距离,存在一定的安全风险。
技术实现思路
1、为能解决上述现有技术的至少一个缺点,本发明提供一种导流罩系统及其控制方法,方案如下:
2、第一方面,本发明提供一种导流罩系统,包括:
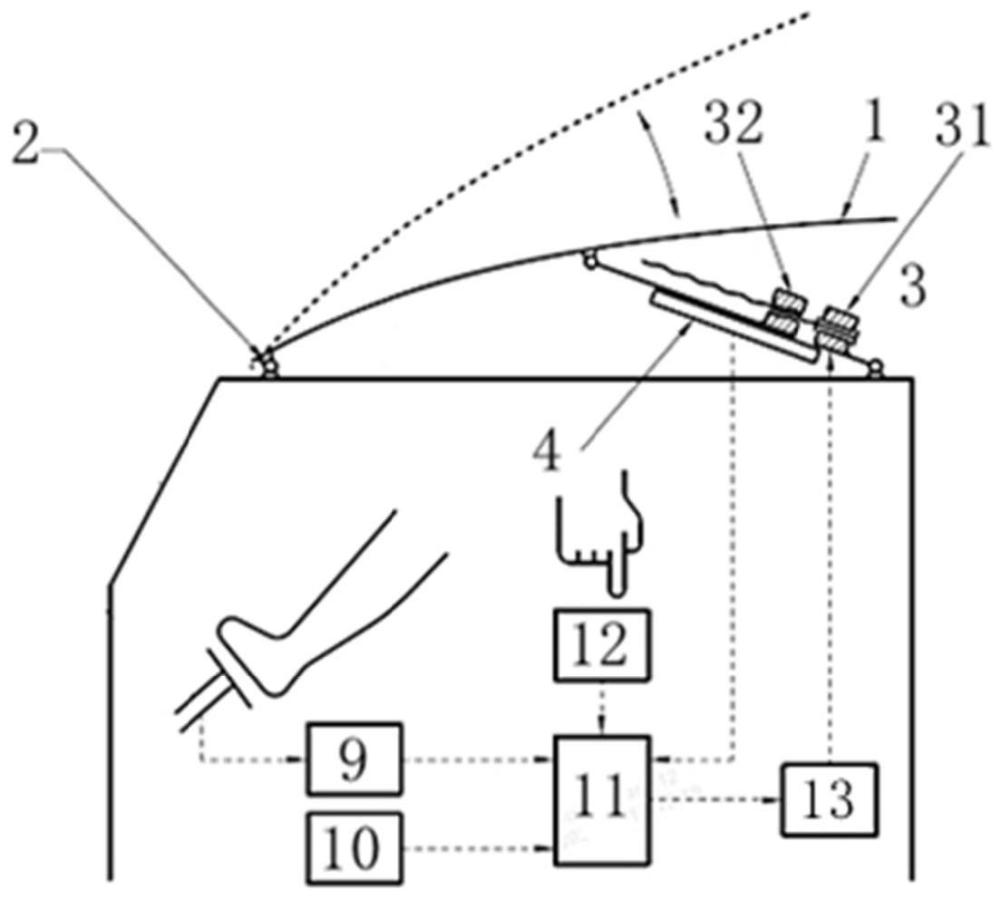
3、顶导流罩机构,包括顶导流罩本体、第一活动连接装置和第一制动装置;顶导流罩本体的一端通过第一活动连接装置与车身连接;顶导流罩本体的另一端通过第一制动装置与车身连接;第一制动装置包括第一制动组件和第一位置检测装置,第一制动组件带动顶导流罩本体按照第一预设路径绕第一活动连接装置相对运动;第一位置检测装置用于检测顶导流罩本体的实际位置;
4、侧导流罩机构,包括侧导流罩本体、第二活动连接装置和第二制动装置;侧导流罩本体的一端通过第二活动连接装置与车身连接;侧导流罩本体的另一端通过第二制动装置与车身连接;第二制动装置包括第二制动组件和第二位置检测装置,第二制动组件带动侧导流罩本体按照第二预设路径绕第二活动连接装置相对运动;第二位置检测装置用于检测侧导流罩本体的实际位置;
5、导流罩控制器,导流罩控制器用于控制顶导流罩本体与侧导流罩本体从实际位置达到目标位置。
6、可选地,第一活动连接装置和第二活动连接装置均为铰接结构。
7、可选地,第一制动组件包括第一电机和第一丝杆机构;
8、第一丝杆机构的一端连接车身;第一丝杆机构的另一端连接顶导流罩本体;
9、第一电机用于驱动第一丝杆机构,进而驱动顶导流罩本体按照第一预设路径绕第一活动连接装置与车身之间产生竖直方向的相对运动。
10、可选地,第一丝杆机构包括第一丝杆、第一螺母和第一连接杆,第一螺母套设于第一丝杆;
11、第一连接杆的一端连接车身,另一端连接顶导流罩本体;第一螺母与第一连接杆传动连接;
12、第一电机用于驱动第一丝杆绕轴转动,带动第一螺母在第一丝杆上运动产生位移,进而通过第一连接杆驱动顶导流罩本体运动。
13、可选地,第一位置检测装置为位移传感器,第一位置检测装置与第一丝杆机构连接,用于检测第一螺母相对于第一丝杆的位移。
14、可选地,第二制动组件包括第二电机和第二丝杆机构;
15、第二丝杆机构的一端连接车身;第二丝杆机构的另一端连接侧导流罩本体;
16、第二电机用于驱动第二丝杆机构,进而驱动侧导流罩本体按照第二预设路径绕第二活动连接装置与车身之间产生水平方向的相对运动。
17、可选地,第二丝杆机构包括第二丝杆、第二螺母和第二连接杆,第二螺母套设于第二丝杆;
18、第二连接杆的一端连接车身,另一端连接侧导流罩本体;第二螺母与第二连接杆传动连接;
19、第二电机用于驱动第二丝杆绕轴转动,带动第二螺母在第二丝杆上运动产生位移,进而通过第二连接杆驱动侧导流罩本体运动。
20、可选地,第二位置检测装置为位移传感器,第二位置检测装置与第二丝杆机构连接,用于检测第二螺母相对于第二丝杆的位移。
21、可选地,导流罩系统还包括位置输入装置,用于设定顶导流罩本体的第一目标位置,以及设定侧导流罩本体的第二目标位置。
22、可选地,导流罩系统还包括:
23、制动力采集装置,用于实时采集车辆的制动力信号;
24、速度采集装置,用于实时采集车辆的当前行驶速度信号;
25、中央控制器,用于接收制动力采集装置发送的制动力信号、速度采集装置发送的当前行驶速度信号、位置输入装置所设定的第一目标位置和第二目标位置、以及第一位置检测装置发送的顶导流罩本体实际位置和第二位置检测装置发送的侧导流罩本体实际位置。
26、可选地,导流罩控制器包括第一导流罩控制器和第二导流罩控制器;
27、第一导流罩控制器用于基于第一目标位置,以及顶导流罩本体的实际位置,控制顶导流罩本体达到第一目标位置;
28、第二导流罩控制器用于基于第二目标位置,以及侧导流罩本体的实际位置,控制侧导流罩本体达到第二目标位置;
29、或者,
30、第一导流罩控制器用于基于制动力信号和当前行驶速度信号所确定的顶导流罩本体的第三目标位置,以及顶导流罩本体的实际位置,控制顶导流罩本体达到第三目标位置;
31、第二导流罩控制器用于基于制动力信号和当前行驶速度信号所确定的侧导流罩本体的第四目标位置,以及侧导流罩本体的实际位置,控制侧导流罩本体达到第四目标位置。
32、另一方面,提供一种导流罩系统控制方法,包括:
33、获取顶导流罩本体和侧导流罩本体的实际位置,以及顶导流罩本体和侧导流罩本体的目标位置;
34、基于实际位置与目标位置的比对结果,生成顶导流罩本体和侧导流罩本体的位置改变信号;
35、基于位置改变信号控制顶导流罩本体和侧导流罩本体达到目标位置。
36、可选地,控制方法还包括:
37、获取位置输入装置所设定的顶导流罩本体的第一目标位置;获取顶导流罩本体的实际位置;
38、基于顶导流罩本体的实际位置与所述第一目标位置的比对结果,生成顶导流罩本体的第一位置改变信号;
39、基于第一位置改变信号控制顶导流罩本体达到第一目标位置;
40、获取位置输入装置所设定的侧导流罩本体的第二目标位置;获取侧导流罩本体的实际位置;
41、基于侧导流罩本体的实际位置与第二目标位置的比对结果,生成侧导流罩本体的第二位置改变信号;
42、基于第二位置改变信号控制侧导流罩本体达到第二目标位置。
43、可选地,控制方法还包括:
44、获取车辆的制动力信号以及当前行驶速度信号,确定车辆的行驶状态;
45、基于车辆的行驶状态确定顶导流罩本体的第三目标位置;并获取顶导流罩本体的实际位置;
46、基于顶导流罩本体的实际位置与第三目标位置的比对结果,生成顶导流罩本体的第三位置改变信号;
47、基于顶导流罩本体的第三位置改变信号控制顶导流罩本体达到第三目标位置;
48、基于车辆的行驶状态确定侧导流罩本体的第四目标位置;并获取侧导流罩本体的实际位置;
49、基于侧导流罩本体的实际位置与第四目标位置的比对结果,生成侧导流罩本体的第四位置改变信号;
50、基于侧导流罩本体的第四位置改变信号控制侧导流罩本体达到第四目标位置。
51、采用上述技术方案,本发明具有如下有益效果:
52、本发明的导流罩系统,顶导流罩本体、侧导流罩本体均可电控进行相对车身的运动从而改变其在车辆前进方向上的投影面积;导流罩系统可以与车辆的行驶状态联动,在行驶中制动时,根据制动力和车辆行驶速度自动调节顶导流罩本体、侧导流罩本体的角度和目标位置,增大导流罩系统在车辆前进方向上的投影面积,增大风阻;另外,空气阻力的竖直分力可以增大车辆轮胎与地面之间的正压力,增大摩擦力极限,使车辆可以更大的制动力进行制动,帮助车辆更快降低速度;顶导流罩本体、侧导流罩本体的角度和位置也可根据驾驶员通过位置输入装置设定目标位置而进行调节,以便于匹配不同高度的货箱。
53、本发明其它特征和优点将在随后具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!