一种实现多功能智能控制及保护的轮式拖拉机的制作方法
本发明涉及轮式拖拉机领域,尤其涉及一种实现多功能智能控制及保护的轮式拖拉机。
背景技术:
1、随着国内耕作模式由单一向复式转变,市场对具备多功能作业模式、智能化程度高的轮式拖拉机需求日趋增加,但是现有的轮式拖拉机智能化程度不足,工作过程中难以进行智能控制及保护,各种工况适应性较低,难以满足市场要求。
技术实现思路
1、本发明的目的是提供一种实现多功能智能控制及保护的轮式拖拉机,提升轮式拖拉机的智能化和对各种工况的适应性。
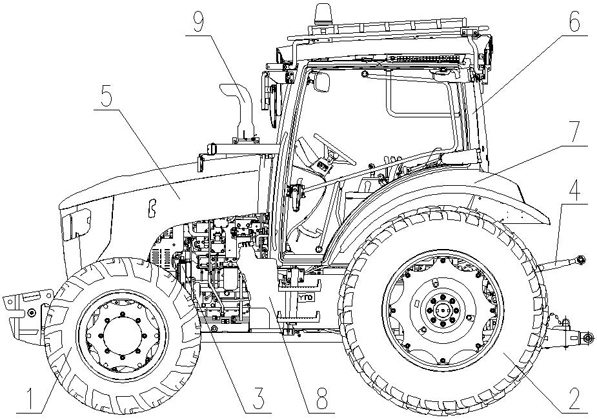
2、本发明为解决上述技术问题所采用的技术方案是:一种实现多功能智能控制及保护的轮式拖拉机,包括沿轮式拖拉机行进方向从前往后依次连接的发动机总成、逆行器总成、传动箱总成和动力输出总成,发动机总成的前端与前桥托架连接,前桥托架的下方连接有前桥总成,前桥总成的左右两侧分别安装有前轮,传动箱总成的左右两侧分别连接有后传动装置,两个后传动装置分别安装有后轮,从而组成轮式拖拉机的底盘总成;底盘总成的上方安装有发动机罩和驾驶室,底盘总成的后端与后工作装置连接,底盘总成上还安装有液压系统和转向系统;
3、发动机总成能够将动力依次传递至逆行器总成和传动箱总成,传动箱总成能够通过后传动装置带动两个后轮转动,传动箱总成的底端还连接有电液分动箱总成,电液分动箱总成与前桥总成连接,当电液分动箱总成处于接合状态时,传动箱总成能够通过电液分动箱总成将动力传递至前桥总成并带动两个前轮转动;发动机总成还能够将动力传递至动力输出总成,以便于动力输出总成进行pto动力输出;后工作装置能够挂接农具,液压系统能够带动后工作装置进行提升或下降运动;
4、驾驶室包括驾驶室骨架,驾驶室骨架内设有负载感应座椅、方向盘、制动踏板、离合踏板、驻车操纵器、变速换档操纵总成、换向操纵总成和pto换档操纵总成,转向系统包括转向油箱、转向器和转向泵,转向器与方向盘连接,发动机总成能够将动力传递至转向泵,转向泵能够从转向油箱吸取液压油并将液压油输送至转向器,转向器通过左转向油管和右转向油管分别与前桥总成的左转向油缸和右转向油缸连接,转向器能够根据方向盘的转动角度分别控制左转向油缸和右转向油缸的活塞杆伸缩运动,以便于控制两个前轮的转动角度;
5、转向器和转向泵之间的液压管路上安装有转向压力检测器,转向压力检测器能够将转向液压值传递至控制器,当转向液压值低于安全阈值时,控制器使驾驶室内的转向压力报警灯进行报警;
6、制动踏板包括左制动踏板和右制动踏板,左制动踏板与制动泵总成的左制动泵连接,右制动踏板与制动泵总成的右制动泵连接,传动箱总成和两个后传动装置之间分别安装有制动器,传动箱总成左侧的制动器通过液压管路与左制动泵连通,传动箱总成右侧的制动器通过液压管路与右制动泵连通,左制动泵和右制动泵上安装有制动压力检测器,制动压力检测器能够将制动压力值传递至控制器,当制动压力值高于安全阈值时,控制器使驾驶室内的制动压力报警灯进行报警;
7、当制动压力值低于安全阈值并达到工作阈值时,控制器使电液分动箱总成切换至接合状态,以便于进行四驱制动;驾驶室内设有四驱开关,传动箱总成上安装有车速传感器,当制动压力值低于工作阈值,且车速>20km/h,控制器使电液分动箱总成切换至分离状态,以便于进行两驱行驶;当制动压力值低于工作阈值,车速≤20km/h,且四驱开关被关闭时,控制器使电液分动箱总成切换至分离状态,以便于进行两驱行驶;当制动压力值低于工作阈值,车速≤20km/h,且四驱开关被开启时,控制器使电液分动箱总成切换至接合状态,以便于进行四驱行驶;
8、变速换档操纵总成与传动箱总成连接,换向操纵总成与逆行器总成连接,换向操纵总成上安装有换向档位检测器,换向档位检测器能够检测换向操纵总成的空档位置并将空挡信号传递至控制器,后工作装置上安装有提升位置检测器,提升位置检测器能够将后工作装置的位置信号传递至控制器,控制器还能够接收离合检测器传递的传动离合器的接合信号,负载感应座椅能够检测驾驶员乘坐的压力,并将乘坐信号传递至控制器;当换向操纵总成和后工作装置处于空档位置,传动离合器处于分离状态,且驾驶员乘坐于负载感应座椅时,控制器使发动机总成能够从停机状态进行启动,否则控制器使发动机总成保持停机状态;
9、驻车操纵器上安装有驻车制动检测器,驻车制动检测器能够将驻车操纵器的位置信号传递至控制器,当驾驶员离开负载感应座椅,且驻车操纵器处于断开位置时,控制器使驾驶室内的驻车制动信号灯熄灭,并使驾驶室内的蜂鸣器进行持续报警;当蜂鸣器持续报警时驾驶员重新乘坐于负载感应座椅,或当蜂鸣器持续报警时驻车操纵器切换至挂接位置,控制器使蜂鸣器停止报警;
10、pto换档操纵总成与动力输出总成连接,pto换档操纵总成上安装有pto档位检测器,pto档位检测器能够将pto换档操纵总成的档位信号传递至控制器,驾驶室内设有pto离合拉杆和pto工作按钮,控制器能够检测pto离合拉杆和pto工作按钮的操作位置;当驾驶员乘坐于负载感应座椅,pto换档操纵总成处于工作档位,且pto离合拉杆被连续两次拉起时,控制器使动力输出离合器切换至接合状态;
11、当驾驶员离开负载感应座椅时,控制器使动力输出离合器切换至分离状态;当动力输出离合器处于分离状态,且pto工作按钮被按下时,控制器使动力输出总成进行动力输出,当动力输出离合器处于分离状态,且pto工作按钮未被按下时,控制器使动力输出总成停止动力输出。
12、驾驶室骨架的左右两侧分别安装有挡泥板,两个挡泥板分别位于两个后轮的上方。
13、发动机总成的左右两侧分别设有燃油箱总成和后处理总成,发动机总成的前端依次安装有散热水箱总成、空滤总成和电瓶箱总成。
14、根据上述技术方案,本发明的有益效果是:
15、本发明的轮式拖拉机上设有控制器,配合多种检测器等电子元件,能够对拖拉机进行多种智能安全保护及辅助控制,包括:
16、1、通过转向压力检测器能够在转向器和转向泵的液压压力过低时报警,实现了转向系统的智能保护。
17、2、通过制动压力检测器能够在制动器和制动泵的液压压力过高时报警,实现制动器的智能保护。
18、3、控制器还能将制动压力检测器的压力值与工作阈值对比,得出制动踏板是否被踩下,当制动踏板被踩下时,控制器使电液分动箱总成切换至接合状态,从而保证了在制动时都是四驱制动,提高制动功能,缩短制动距离。
19、4、控制器能够通过车速传感器和四驱开关配合控制电液分动箱总成,在制动踏板未被踩下且车速>20km/h时保证进行两驱行驶,并在制动踏板未被踩下且车速≤20km/h时通过四驱开关进行两驱和四驱的切换控制,实现了智能化的驱动控制。
20、5、通过换向档位检测器使控制器得到换向操纵总成是否在空挡位置,通过提升位置检测器使控制器得到后工作装置的位置,通过离合检测器使控制器得到传动离合器是否接合,负载感应座椅能够使控制器得到驾驶员是否坐在座椅上,而只有当换向操纵总成和后工作装置处于空档位置、传动离合器处于分离状态,且驾驶员乘坐于负载感应座椅时,控制器使发动机总成能够从停机状态进行启动,否则控制器使发动机总成始终保持停机状态,实现了发动机的智能启动保护。
21、6、通过驻车制动检测器使控制器得到驻车操纵器的位置,当驾驶员离开负载感应座椅,且驻车操纵器处于断开位置时,控制器使驾驶室内的驻车制动信号灯熄灭,并使驾驶室内的蜂鸣器进行持续报警,实现了驻车智能保护,避免驾驶员未进行驻车操作而离开的情况;并且在驾驶员重新乘坐或驻车操纵器切换至挂接位置后,控制器能够使蜂鸣器自动停止报警。
22、7、通过pto档位检测器使控制器得到pto换档操纵总成的档位,控制器还能够检测pto离合拉杆和pto工作按钮的操作位置,当驾驶员乘坐于负载感应座椅,pto换档操纵总成处于工作档位,且pto离合拉杆被连续两次拉起时,控制器使动力输出离合器切换至接合状态,否则动力输出离合器就会保持分离状态,实现了动力输出离合器的接合控制,避免动力输出离合器的误接合。
23、8、当驾驶员离开负载感应座椅时,控制器使动力输出离合器切换至分离状态,实现了动力输出离合器的自动分离保护。当动力输出离合器处于分离状态,且pto工作按钮被按下时,控制器使动力输出总成进行动力输出,当动力输出离合器处于分离状态,且pto工作按钮未被按下时,控制器使动力输出总成停止动力输出,从而使动力输出与人为促动实时相关,pto工作按钮未被按下时不会产生动力输出,实现了pto工作的安全保护。
24、综上所述,本发明的轮式拖拉机能够实现多功能智能控制及保护,能够满足欧洲法规认证要求,提升了轮式拖拉机的智能化和对于多种工况的适应性。
- 还没有人留言评论。精彩留言会获得点赞!