一种数据与机理融合驱动的个性化人机协同控制方法
本发明属于智能驾驶控制,涉及一种人车协同转向控制方法,更加具体的来讲,涉及一种数据与机理融合驱动的个性化人机协同控制方法。
背景技术:
1、智能驾驶技术能够有效辅助驾驶员减轻其驾驶工作量并提高复杂场景下的行车安全性。近年来随着硬件设备的强大和理论系统的成熟,汽车自动化水平越来越高,但由于缺少法律监管、部分驾驶员信任不足,电车困境等问题,人类驾驶员和智能驾驶系统在很长时间内共存。人机协同驾驶作为汽车智能化领域的热点方向,能够充分发挥智能系统感知精细、决策规范、控制精准的优势,同时有效避免驾驶员不在控制回路内带来的种种监管难题。
2、传统的人机协同转向控制方案多依赖于预先识别的驾驶员行为特性参数以及精确的车辆动力学模型。然而,现实世界中的驾驶员行为具有高度的随机性和不可预测性,且驾驶员的驾驶特性因人而异。基于静态驾驶员模型设计的人机协同控制方案难以为不同的驾驶员提供量身定制的辅助效果。另一方面,行车环境是高度动态变化的过程,过于依赖精确的车辆动力学模型无疑会降低协同控制算法在复杂场景下的适用性和扩展性。面向具有不同驾驶特性的驾驶员提供个性化、智能化的协同转向控制辅助是当前人机共驾亟待解决的重要问题。
技术实现思路
1、本发明为解决现实环境下驾驶员行为不确定性和车辆复杂动力学带来的挑战,提出数据与机理融合驱动的个性化人机协同转向控制方法。该方法利用在线收集到的驾驶员转向角历史数据,迭代学习获取面向个性化驾驶员的车辆主动前轮转向系统和主动后轮转向系统的最优控制策略。
2、本发明是采用如下技术方案实现的:
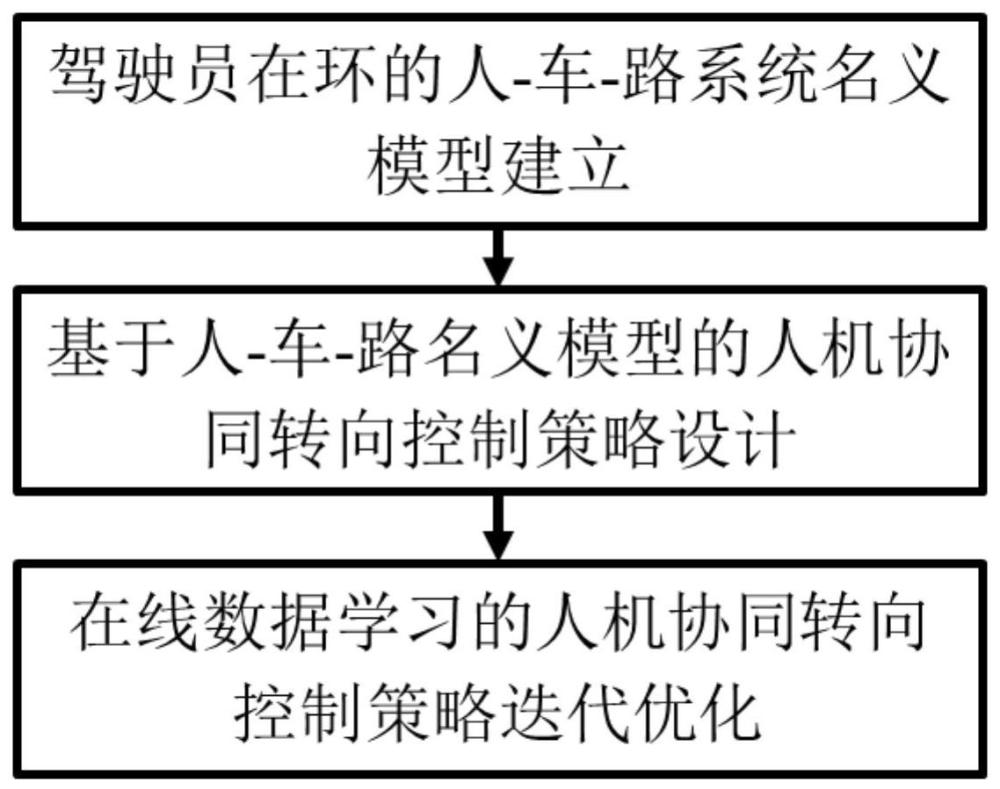
3、一种数据与机理融合驱动的个性化人机协同控制方法,适用于具备机械解耦线控转向底盘的四轮驱动车辆,由人类驾驶员、主动前轮转向系统和主动后轮转向系统协同控制的车辆驾驶过程;首先基于人机转角交互关系,构建驾驶员在环的人-车-路系统名义模型;然后建立误差系统的输出调节方程,设计主动前轮转向系统和主动后轮转向系统动态博弈的转向控制器;最后利用强化学习和自适应动态规划技术,通过收集的人-车-路系统数据在线学习优化主动前轮转向系统和主动后轮转向系统的控制策略,实现人机协同转向控制;本方法具体步骤如下:
4、步骤一、驾驶员在环的人-车-路系统名义模型建立:
5、建立大地坐标系:原点o固结于地面,x轴正方向为车辆初始运动方向,y轴的正方向为x轴逆时针旋转90度方向;
6、建立车辆坐标系:以车辆质心o为坐标原点,x轴的正方向为车辆前进的方向,y轴的正方向为x轴逆时针旋转90度方向;
7、首先用车辆二自由度模型表征转向过程中车辆的操纵稳定性与车辆的侧向运动的关系,利用远近点预瞄模型模拟驾驶员的行为,建立驾驶员在环的人-车-路系统名义模型,具体过程如下:
8、假定车辆为一个刚性体,根据牛顿第二定律与力矩平衡关系,可以得到车辆动力学模型,如式(1)所示:
9、
10、式中,m为车辆的质量,单位kg;la为车辆质心到车辆前轴的距离,单位m;lb为车辆质心到车辆后轴的距离,单位m;iz为车辆绕z轴的转动惯量,单位kg·m2;vx为车辆质心处的纵向速度,单位m/s;β为车辆质心处的侧偏角,单位rad;是横摆角,单位rad;r是横摆角速度,单位rad/s;fyf为车辆前轮侧向力,单位n;fyr为车辆后轮侧向力,单位n;
11、车辆前轮侧向力fyf和车辆后轮侧向力fyr的计算公式如式(2)所示:
12、
13、其中,δf代表车辆前轮转角,单位rad;δr代表车辆后轮转角,单位rad;af代表车辆的前轮侧偏角,单位rad;ar代表车辆的后轮侧偏角,单位rad;cf表示前轮轮胎的侧偏刚度,单位n/rad;cr表示后轮轮胎的侧偏刚度,单位n/rad;
14、车辆跟踪期望路径时的跟踪误差为:
15、
16、式中ey代表横向跟踪误差,单位m,通过计算大地坐标系下车辆前方工作路径目标点和车辆质心之间的沿车身横摆角方向的横向距离得到;代表车辆质心处的航向误差,单位rad,通过测量车辆当前的横摆角与高精度导航地图下目标路径的理想横摆角的差值得到;
17、利用远近点预瞄模型表征驾驶员的转向操纵行为,对于曲线道路,选取车辆远方第一个弯道处的切点作为远预瞄点,车辆前方的道路中心点作为近预瞄点,驾驶员在近预瞄点的视觉角θnear和驾驶员在远预瞄点的视觉角θfar分别为:
18、
19、式中,ls代表近预瞄距离,单位m,lfar表示远预瞄距离,单位m,近预瞄距离和远预瞄距离间存在关系为ls=vxtp=0.4lfar,其中,tp代表预瞄时间,tp的取值范围是0.6~2.5;ρw表示道路曲率,单位m-1,可通过高精度导航地图实时获取;
20、利用远预瞄点和近预瞄点传递的视觉信息,驾驶员作用的前轮转向角如式(5)所示:
21、
22、其中δsw代表驾驶员控制的方向盘转角,单位rad;δh代表驾驶员控制的前轮转向角,单位rad;ηg是车辆转向系统的传动比,属于车辆的固有特性,现代汽车结构中ηg的值在0.85到1.10之间;τd为驾驶员反应延迟时间,单位s,τd的取值范围为0.12~0.3;κ0为驾驶员特性因子,κ0的取值范围为0.1~0.34,kp代表驾驶员前馈转向增益,kp的取值范围为0.8~5.0,kc代表驾驶员反馈转向增益,kc的取值范围为0.5~3.0;
23、由式(1)、式(3)和式(5),建立驾驶员在环的人-车-路名义模型为:
24、
25、其中,系统状态为系统输出为上角标t代表矩阵的转置;系统输入为u1=δafs,u2=δars,其中δafs代表主动前轮转向系统控制的车辆前轮转角,单位rad,δars为主动后轮转向系统控制的车辆后轮转角,单位rad;外部干扰为道路曲率ρw,其他系数矩阵为:
26、
27、其中,i4代表维数为4的单位矩阵,04×2代表4行2列的零矩阵;
28、利用式(7)求解以下调节方程得到向量yl,参数参数
29、
30、步骤二、基于人-车-路名义模型的人机协同转向控制策略设计
31、设计主动前轮转向系统和主动后轮转向系统的控制策略满足以下形式:
32、u1=-kγ1x+kl1ρw,u2=-kγ2x+kl2ρw (9)
33、其中,kγ1代表主动前轮转向系统的反馈控制增益,kγ2代表主动后轮转向系统的反馈控制增益,kl1代表主动前轮转向系统的前馈控制增益,kl2代表主动后轮转向系统的前馈控制增益,且:
34、
35、利用输出调节理论,令由式(6)得不包含扰动ρw的误差系统表达式为:
36、
37、且:
38、
39、其中代表主动前轮转向系统针对式(11)误差系统的控制策略,而代表主动后轮转向系统针对式(11)误差系统的控制策略,和通过联立求解以下优化目标函数式(13)和式(14)得到:
40、
41、
42、式中j1代表主动前轮转向系统的优化目标函数,j2代表主动后轮转向系统的优化目标函数;min为最小化优化算子;为积分运算,表示从t=t0时刻到t=t∞时刻的对内函数的积分,dt代表时间t的微分;q1为主动前轮转向系统的优化目标函数j1中对状态量的惩罚矩阵,该矩阵为正定对角矩阵,矩阵的维数为6,矩阵的特征值取值范围在0到10之间;q2为主动后轮转向系统的优化目标函数j2中对状态量的惩罚矩阵,该矩阵为正定对角矩阵,矩阵的维数为6,矩阵的特征值取值范围在0到10之间;γ1为主动前轮转向系统的优化目标函数j1中对控制量的加权因子,γ1的取值范围是1~5;γ2为主动后轮转向系统的优化目标函数j2中对控制量的加权因子,γ2的取值范围是1~5;
43、根据最优控制理论和博弈论中的纳什均衡条件,推导后得到主动前轮转向系统的反馈控制增益kγ1和主动后轮转向系统的反馈控制增益kγ2为:
44、
45、其中,p1是主动前轮转向系统的反馈控制增益对应的正定对称矩阵,p2是主动后轮转向系统的反馈控制增益对应的正定对称矩阵,p1和p2通过联立求解式(16)中耦合里卡提方程组得到:
46、
47、式中,
48、
49、步骤三、在线数据学习的人机协同转向控制策略迭代优化
50、基于步骤二所设计的主动前轮转向系统的控制策略u1和主动前轮转向系统的控制策略u2,现提出一种在线数据迭代学习优化的方法,该方法无需求解耦合里卡提方程组式(16)便可得到主动前轮转向系统的最优反馈控制增益和主动后轮转向系统的最优反馈控制增益
51、定义在t=t0时刻,人机共驾模式开启,设置主动前轮转向系统的初始反馈控制增益和主动后轮转向系统的初始反馈控制增益和满足条件其中计算符号σ(·)表示矩阵的谱范数,表示开放左半复平面;设置有界探索噪声δ1、δ2,可选用不同频率的正弦信号,但δ1、δ2的幅值应分别小于主动前轮转向系统的初始反馈控制增益和主动后轮转向系统的初始反馈控制增益的范数;
52、设置t∈[t0,tη)时刻为学习阶段,其中tη>t0≥0,在学习阶段应用主动前轮转向系统的初始控制策略和主动后轮转向系统的初始控制策略通过电子控制单元传递驾驶员命令和转向控制器命令,在此阶段车辆前轮转向角和车辆后轮转向角分别为:
53、
54、采集每个采样时刻的系统状态道路曲率ρw、主动前轮转向系统的初始控制策略为和主动后轮转向系统的初始控制策略在t=tη时刻,令变量通过收集到的x、ρw、和计算下列矩阵:
55、
56、式中,0≤t0<t1<t2<…<tη,t2-t1=tη-tη-1=δt,δt代表采样时间间隔,δt的取值范围为0.01~0.05;代表t=ti时刻的代表t=ti时刻的的转置,i={0,1,2,…,η-1,η};表示克罗内克积算子;
57、定义迭代次数为k,令k的初始值为0,选择最大迭代次数kmax和迭代阈值σ0,其中kmax选取范围建议在50-200之间,σ0选取范围建议在10-3-10-2之间,计算第k次迭代时的参数矩阵为:
58、
59、式中上角标k代表第k次迭代;vec(·)表示向量化算子,该算子将矩阵转换为列向量;i6表示维数为6的单位矩阵;
60、利用式(20)求解以下线性方程组,能够得第k次迭代时的正定矩阵p1k、以及第k+1次迭代时主动前轮转向系统的反馈控制增益以及主动后轮转向系统的反馈控制增益
61、
62、
63、式中代表矩阵的伪逆,代表矩阵的伪逆;
64、计算更新后的反馈控制增益误差σ为:
65、
66、给出以下迭代判断条件:
67、k>kmax|σ<σ0 (24)
68、式中,符号|代表或运算;
69、当迭代判断条件式(24)不成立时,则迭代次数k增加1并重新计算式(20),更新相应的参数矩阵求解式(21)和(22),并由式(23)重新计算更新后的反馈控制增益误差σ,直到迭代判断条件式(24)成立,迭代结束;此时可将第k+1次迭代时主动前轮转向系统的反馈控制增益主动后轮转向系统的反馈控制增益分别认为是主动前轮转向系统的最优反馈控制增益主动后轮转向系统的最优反馈控制增益即:
70、
71、利用式(10)计算主动前轮转向系统的最优前馈控制增益和主动后轮转向系统的最优前馈控制增益分别为:
72、
73、主动前轮转向系统的最优控制策略和主动后轮转向系统的最优控制策略分别为:
74、
75、对于线控底盘的智能驾驶车辆,方向盘和转向执行机构已经解耦,能够利用电子控制单元传递驾驶员命令和转向控制器命令,因此在t>tη时刻,最终执行的车辆前轮转向角δf和车辆后轮转向角δr分别为:
76、
77、其中,最终执行的车辆前轮转向角δf是驾驶员控制的前轮转向角δh和主动前轮转向系统的最优控制策略耦合的结果,最终执行的车辆后轮转向角δr是主动后轮转向系统的最优控制策略最终实现数据与机理融合驱动的个性化人机协同控制。本发明的有益效果为:
78、1.本发明提出一种数据与机理融合驱动的个性化人机协同控制方法,能够有效解决当前人机共驾面临的不同驾驶员驾驶特性变化和道路曲率扰动的问题,为不同特性的驾驶员提供有效的转向辅助。
79、2.本发明基于先进的线控底盘四驱车辆,设计了一种由主动前轮转向系统和主动后轮转向系统共同组成的交互式协同转向控制器,通过纳什博弈有效平衡了转向控制时路径跟踪精度和车辆稳定性的双重目标。
80、3.本发明提出了一种基于强化学习和自适应动态规划方法的在线迭代学习策略,该控制策略仅需要收集横向车辆状态、道路曲率和驾驶员转向角等有限数据便可实现迭代更新优化。
- 还没有人留言评论。精彩留言会获得点赞!