一种具有全向移动功能的并联调姿装置及方法与流程
本发明属于自动行驶,尤其是涉及一种具有全向移动功能的并联调姿装置及方法。
背景技术:
1、并联机构动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构,当前并联调姿装置是在使用过程中存在以下问题,第一,采用转向轮作为驱动组件,在狭小空间内不宜转向,缺少全向移动的能力;第二,通过无线控制的模式驱动装置移动,存在控制精度低,无法实现自动行驶的问题。
技术实现思路
1、有鉴于此,本发明旨在提出一种具有全向移动功能的并联调姿装置及方法,以期解决上述部分技术问题中的至少之一。
2、为达到上述目的,本发明的技术方案是这样实现的:
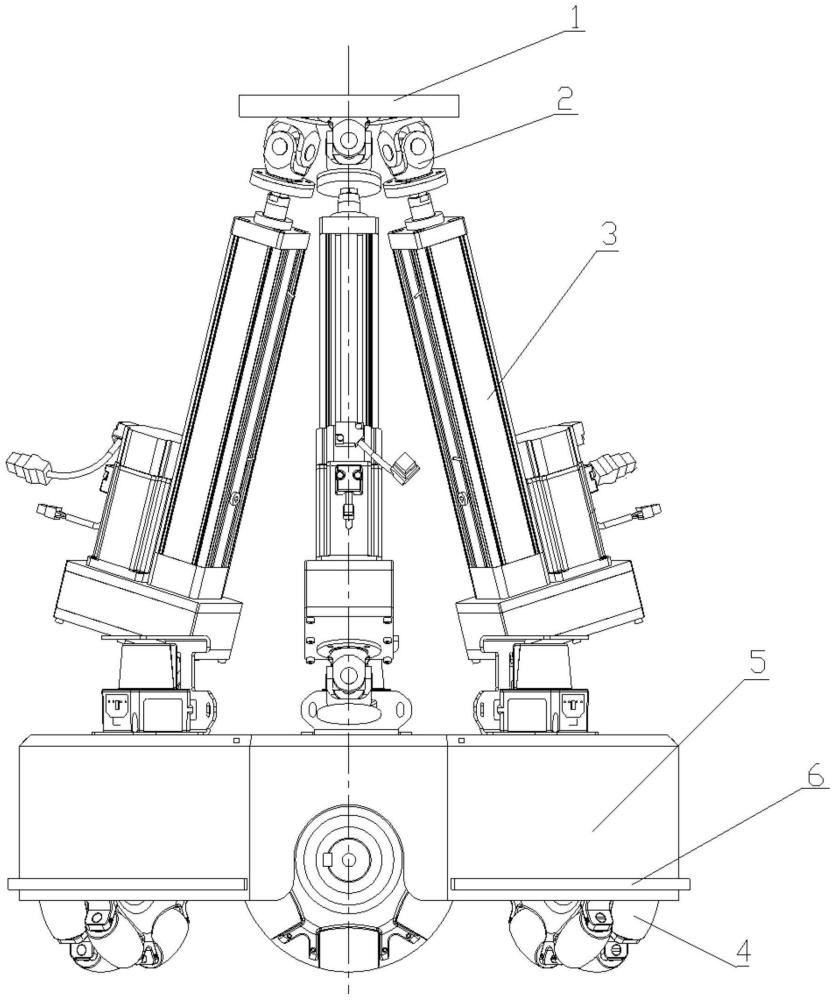
3、本发明第一方面提供了一种具有全向移动功能的并联调姿装置,包括:
4、底座,所述底座固设有多个全向轮;
5、动平台,所述动平台通过直线驱动组件与底座连接;
6、直线驱动组件,所述直线驱动组件的输出轴通过虎克铰与动平台连接,所述直线驱动组件的壳体通过虎克铰与底座连接;
7、rfid读取器,所述rfid读取器安装于底座的底端。
8、进一步的,所述底座外侧设有防撞环,所述防撞环对应设有防撞触边传感;
9、所述底座上相邻的直线驱动组件之间设有激光避障传感器;
10、所述直线驱动组件的数量为三个,三个所述直线驱动组件沿底座呈周向均匀设置;
11、所述全向轮的数量为三个,三个所述全向轮沿底座呈周向均匀设置。
12、本发明第二方面提供了一种具有全向移动功能的并联调姿方法,应用第一方面所述的具有全向移动功能的并联调姿装置,包括以下步骤:
13、s1、通过rfid读取器读取地面rfid标签获得的装置的目前的位置信息;
14、s2、计算当前位置和目标位置的误差控制全向轮转动行驶至目标位置。
15、进一步的,所述s2中控制全向轮转动行驶至目标位置的流程如下:
16、s21、建立车体坐标系xoy,建立世界坐标系x′o′y′通过自车速度和角速度计算每个全向轮的线速度,计算公式如下:
17、va=vx+ωl;
18、vb=-vx cosθ1-ysinθ1+ωl;
19、vc=-vx sinθ2+ycosθ2+ωl;
20、其中,l为车轮到车体中心的距离,ω为自车的角速度,顺时针旋转为正方向,三个全向轮的线速度分别为va、vb、vc,车体在车体坐标系下的速度分别为vx、vy。夹角θ1=π/3,θ2=π/6,α为两个车体坐标系与世界坐标系之间的夹角;
21、s22、将s21中的公式转换为矩阵形式,矩阵公式如下:
22、
23、s23、通过从世界坐标系x′o′y′到车体坐标系xoy的旋转矩阵计算从车体坐标系xoy到世界坐标系x′o′y′的旋转矩阵,旋转矩阵如下:
24、
25、s24、通过从车体坐标系xoy到世界坐标系x′o′y′的旋转矩阵和车体在世界坐标系下的速度vx′、vy′计算车体坐标系下的速度vx、vy,计算公式如下:
26、
27、s25、将步骤s24中公式带入至s22的公式中得到如下计算公式:
28、
29、进一步的,所述步骤s1包括以下步骤:
30、s11、在地面或目标位置安装rfid标签,每个标签都包含一个唯一的标识符;
31、s12、rfid读取器定期发送读取请求信号;
32、s13、当rfid读取器发送请求信号到附近的rfid标签时,标签会响应并发送包含唯一标识符的信息;
33、s14、rfid读取器接收到标签的响应后,读取其中的唯一标识符;
34、通过读取到的rfid标签的唯一标识符,查找预先建立的映射关系,获得与标识符相对应的当前位置信息。
35、进一步的,所述步骤s14包括以下步骤:
36、s141、rfid读取器接收到标签的响应后,对rfid标签响应的数据进行数据解码,将fid标签响应的数据转换为可读取的格式;
37、s142、从解码后的数据中提取唯一标识符;
38、s143、将提取到的唯一标识符与预先建立的位置映射关系进行匹配;
39、s144、匹配成功后更新装置的当前位置信息。
40、进一步的,所述步骤s141中,epc为标签响应的数据的编码格式,epc数据格式包括对象类别、唯一标识符;
41、其中对应类别代表rfid标签所处的区域,唯一标识符为rfid标签所处的坐标信息;
42、通过两次的获取的坐标信息和区域,计算装置的当前航向。
43、本发明第三方面提供了一种电子设备,包括处理器以及与处理器通信连接,且用于存储所述处理器可执行指令的存储器,所述处理器用于执行上述第一方面所述的方法。
44、本发明第四方面提供了一种服务器,包括至少一个处理器,以及与所述处理器通信连接的存储器,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述处理器执行,以使所述至少一个处理器执行如第一方面所述的方法。
45、本发明第五方面提供了一种计算机可读取存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现第一方面所述的方法。
46、相对于现有技术,本发明所述的一种具有全向移动功能的并联调姿装置及方法具有以下有益效果:
47、(1)本发明所述的一种具有全向移动功能的并联调姿装置,通过全向轮的设置可以实现装置的全向移动的能力,扩宽了装置的适用范围。
48、(2)本发明所述的一种具有全向移动功能的并联调姿方法,基于rfid的定位方法通常用于室内导航、物流管理和自动导引系统中,因为它可以提供相对准确的位置信息,并且不受光照和视线阻挡的影响。
技术特征:
1.一种具有全向移动功能的并联调姿装置,其特征在于,包括:
2.根据权利要求1所述的一种具有全向移动功能的并联调姿装置,其特征在于:所述底座(5)外侧设有防撞环(6),所述防撞环(6)对应设有防撞触边传感;
3.一种具有全向移动功能的并联调姿方法,应用权利要求1-2任一所述的具有全向移动功能的并联调姿装置,其特征在于,包括以下步骤:
4.根据权利要求3所述的一种具有全向移动功能的并联调姿方法,其特征在于:所述s2中控制全向轮(4)转动行驶至目标位置的流程如下:
5.根据权利要求3所述的一种具有全向移动功能的并联调姿方法,其特征在于,步骤s1包括以下步骤:
6.根据权利要求5所述的一种具有全向移动功能的并联调姿方法,其特征在于:步骤s14包括以下步骤:
7.根据权利要求6所述的一种具有全向移动功能的并联调姿方法,其特征在于:步骤s141中,epc为标签响应的数据的编码格式,epc数据格式包括对象类别、唯一标识符;
8.一种电子设备,包括处理器以及与处理器通信连接,且用于存储所述处理器可执行指令的存储器,其特征在于:所述处理器用于执行上述权利要求1-7任一所述的方法。
9.一种服务器,其特征在于:包括至少一个处理器,以及与所述处理器通信连接的存储器,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述处理器执行,以使所述至少一个处理器执行如权利要求1-7任一所述的方法。
10.一种计算机可读取存储介质,存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现权利要求1-7任一项所述的方法。
技术总结
本发明提供了一种具有全向移动功能的并联调姿装置及方法,包括:底座,所述底座固设有多个全向轮;动平台,所述动平台通过直线驱动组件与底座连接;直线驱动组件,所述直线驱动组件的输出轴通过虎克铰与动平台连接,所述直线驱动组件的壳体通过虎克铰与底座连接;RFID读取器,所述RFID读取器安装于底座的底端。本发明有益效果:通过全向轮的设置可以实现装置的全向移动的能力,扩宽了装置的适用范围。
技术研发人员:张继民,闫栋,宋鹏亮,吴锡,宫润鲜
受保护的技术使用者:天津航天机电设备研究所
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!