一种履带式飞爬机器人
本技术属于爬壁机器人,尤其是一种履带式飞爬机器人。
背景技术:
1、随着机器人技术的发展,机器人被广泛应用于多个领域。爬行机器人是一种既能在平地行走,又能在坡面爬行的机器人,可用于执行比如壁面清洗、高空救援、地质勘测、损伤检测等各种任务。
2、爬行机器人的行走方式分为足式、轮式和履带式三种,足式爬行机器人与壁面的接触面积小,稳定性差;轮式爬行机器人与壁面的接触面积较大,稳定性较好,但是足式和轮式爬行机器人的越障能力较差。履带式爬行机器人与壁面的接触面积最大,具有良好的稳定性和越障能力,但是移动速度慢。
3、现有技术普遍通过负压吸附实现爬行机器人在壁面上的驻停,但是负压吸附对于接触面的要求较高,在接触面粗糙度较高的情况下吸附能力较差,容易导致爬行机器人掉落。
技术实现思路
1、针对现有技术的不足,本实用新型拟解决的技术问题是,提供一种履带式飞爬机器人。
2、为实现上述目的,本实用新型采用的技术方案是:
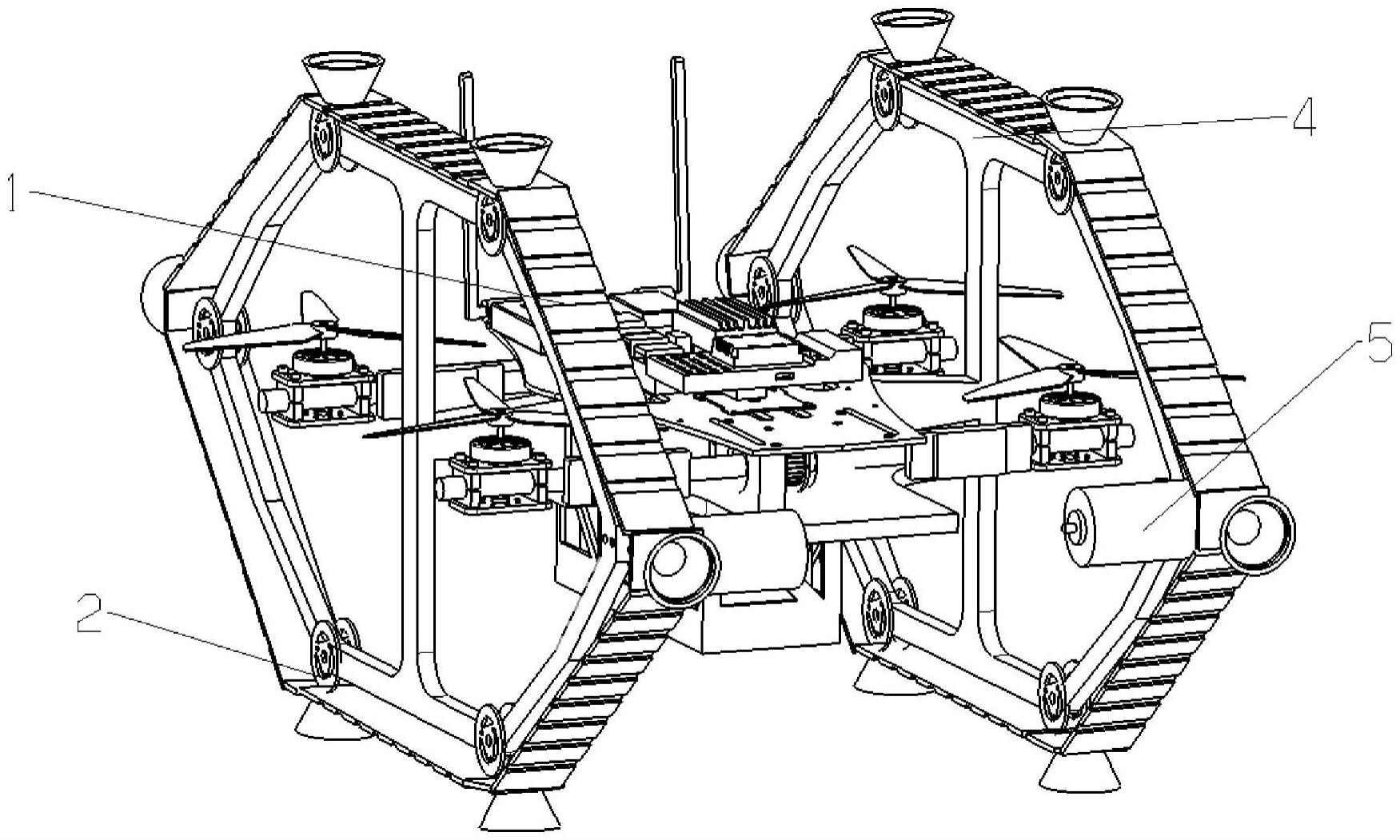
3、一种履带式飞爬机器人,包括底盘、履带式爬行模组和控制模组;底盘的左、右两侧分别设有履带式爬行模组,控制模组位于底盘上;其特征在于,该机器人还包括旋翼模组,底盘的前、后端分别设有旋翼模组;
4、所述旋翼模组包括电调、旋翼本体、旋翼驱动电机、主动齿轮、从动齿轮、连接轴和舵机;舵机位于底盘上,主动齿轮位于舵机的输出轴上;连接轴位于底盘上且能够转动,从动齿轮位于连接轴上,主动齿轮和从动齿轮通过传动皮带连接;旋翼驱动电机安装在连接轴上,旋翼本体与旋翼驱动电机的输出轴连接,电调位于连接轴上且与旋翼驱动电机电连接;当位于底盘前端的两个旋翼本体的轴向垂直于底盘,底盘后端的两个旋翼本体的轴向平行于底盘时,两个旋翼模组为机器人的爬行提供助力;当四个旋翼本体的轴向均垂直于底盘时,两个旋翼模组为机器人在目标位置的驻停提供助力。
5、进一步的,所述履带式爬行模组包括履带、从动轮、主动轮、履带支架、履带驱动电机和吸盘;履带支架的中部延伸出一个凸台与底盘连接;履带驱动电机通过履带驱动电机支架安装在履带支架的前端,主动轮位于履带驱动电机的输出轴上,履带支架上间隔设有多个从动轮,履带套装在主动轮和所有从动轮上,履带上间隔设有多个吸盘。
6、进一步的,所述底盘、履带支架以及连接轴均采用碳纤维材料制成。
7、进一步的,所述控制模组包括飞控、机载电脑、无线传输模块、接收机、天线和地面遥控器;飞控与机载电脑连接,机载电脑通过无线传输模块向地面遥控器传输数据,天线接收地面遥控器发射的信号并传输给接收机,接收机将接收到的信号传输至机载电脑。
8、进一步的,所述机器人还包括摄像头和云台,摄像头通过云台安装在底盘前端,摄像头与机载电脑连接。
9、与现有技术相比,本实用新型的有益效果是:
10、本实用新型的履带式飞爬机器人一方面采用履带式结构,保证机器人具有良好稳定性和越障能力,能够适用于桥梁、山坡等场合;另一方面设置有旋翼模组,将底盘后端的两个旋翼本体的轴向调整至与底盘平行,四个旋翼本体旋转提供向前的推力,进而为机器人爬行提供助力,实现机器人的快速爬行,以克服履带式机器人运动缓慢的问题;当机器人爬行至目标位置时,使四个旋翼本体的轴向均垂直于底盘,四个旋翼本体类似于直升机旋翼为机器人提供升力,与吸盘提供的吸附力一起实现机器人的驻停,保证了驻停时的稳定性,防止机器人掉落。底盘、履带支架以及连接轴均采用碳纤维材料制成,实现机器人的轻量化,减小自重;履带支架的框架结构也为旋翼本体旋转提供了充足的空间。
技术特征:
1.一种履带式飞爬机器人,包括底盘、履带式爬行模组和控制模组;底盘的左、右两侧分别设有履带式爬行模组,控制模组位于底盘上;其特征在于,该机器人还包括旋翼模组,底盘的前、后端分别设有旋翼模组;
2.根据权利要求1所述的履带式飞爬机器人,其特征在于,所述履带式爬行模组包括履带、从动轮、主动轮、履带支架、履带驱动电机和吸盘;履带支架的中部延伸出一个凸台与底盘连接;履带驱动电机通过履带驱动电机支架安装在履带支架的前端,主动轮位于履带驱动电机的输出轴上,履带支架上间隔设有多个从动轮,履带套装在主动轮和所有从动轮上,履带上间隔设有多个吸盘。
3.根据权利要求2所述的履带式飞爬机器人,其特征在于,所述底盘、履带支架以及连接轴均采用碳纤维材料制成。
4.根据权利要求1所述的履带式飞爬机器人,其特征在于,所述控制模组包括飞控、机载电脑、无线传输模块、接收机、天线和地面遥控器;飞控与机载电脑连接,机载电脑通过无线传输模块向地面遥控器传输数据,天线接收地面遥控器发射的信号并传输给接收机,接收机将接收到的信号传输至机载电脑。
5.根据权利要求4所述的履带式飞爬机器人,其特征在于,所述机器人还包括摄像头和云台,摄像头通过云台安装在底盘前端,摄像头与机载电脑连接。
技术总结
本技术为一种履带式飞爬机器人,包括底盘、履带式爬行模组、控制模组和旋翼模组;底盘的左、右两侧分别设有履带式爬行模组,底盘的前、后端分别设有旋翼模组;所述旋翼模组包括电调、旋翼本体、旋翼驱动电机、主动齿轮、从动齿轮、连接轴和舵机;舵机位于底盘上,主动齿轮位于舵机的输出轴上;连接轴位于底盘上且能够转动,从动齿轮位于连接轴上,主动齿轮和从动齿轮通过传动皮带连接;旋翼驱动电机安装在连接轴上,旋翼本体与旋翼驱动电机的输出轴连接,电调位于连接轴上且与旋翼驱动电机电连接。该机器人具有良好的稳定性和越障能力,旋翼模组的旋翼本体的轴向方向可调节,不仅为机器人的爬行提供助力,还为机器人在目标位置的驻停提供助力。
技术研发人员:张俊飞,韩可瑶,杨梦阳,郭睿,石彦哲,郭鑫飞
受保护的技术使用者:河北工业大学
技术研发日:20230203
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!