一种高适应性的履带式动力模块及履带机器人的制作方法
本技术涉及机器人,尤其是指一种高适应性的履带式动力模块及履带机器人。
背景技术:
1、随着现代科技的不断发展,机器人被应有到工业自动化操作领域,越来越多的代替人类完成各项工作。履带式机器人主要指搭载履带底盘机构的机器人,履带移动机器人具有牵引力大、不易打滑、越野性能好等优点,可以搭载摄像头、探测器等设备代替人类从事一些危险工作(如排爆、化学探测等),减少不必要的人员伤亡。
2、但是,由于有些工况较为复杂,履带式机器人在导磁金属表面行走时,稳定性不佳,因此,亟需一种能够适应导磁金属表面行走的履带式动力组件。
技术实现思路
1、为此,本实用新型所要解决的技术问题在于克服现有技术中履带式机器人不适用复杂工况行走,灵活性低的技术缺陷。
2、为解决上述技术问题,本实用新型提供了一种高适应性的履带式动力模块,包括:
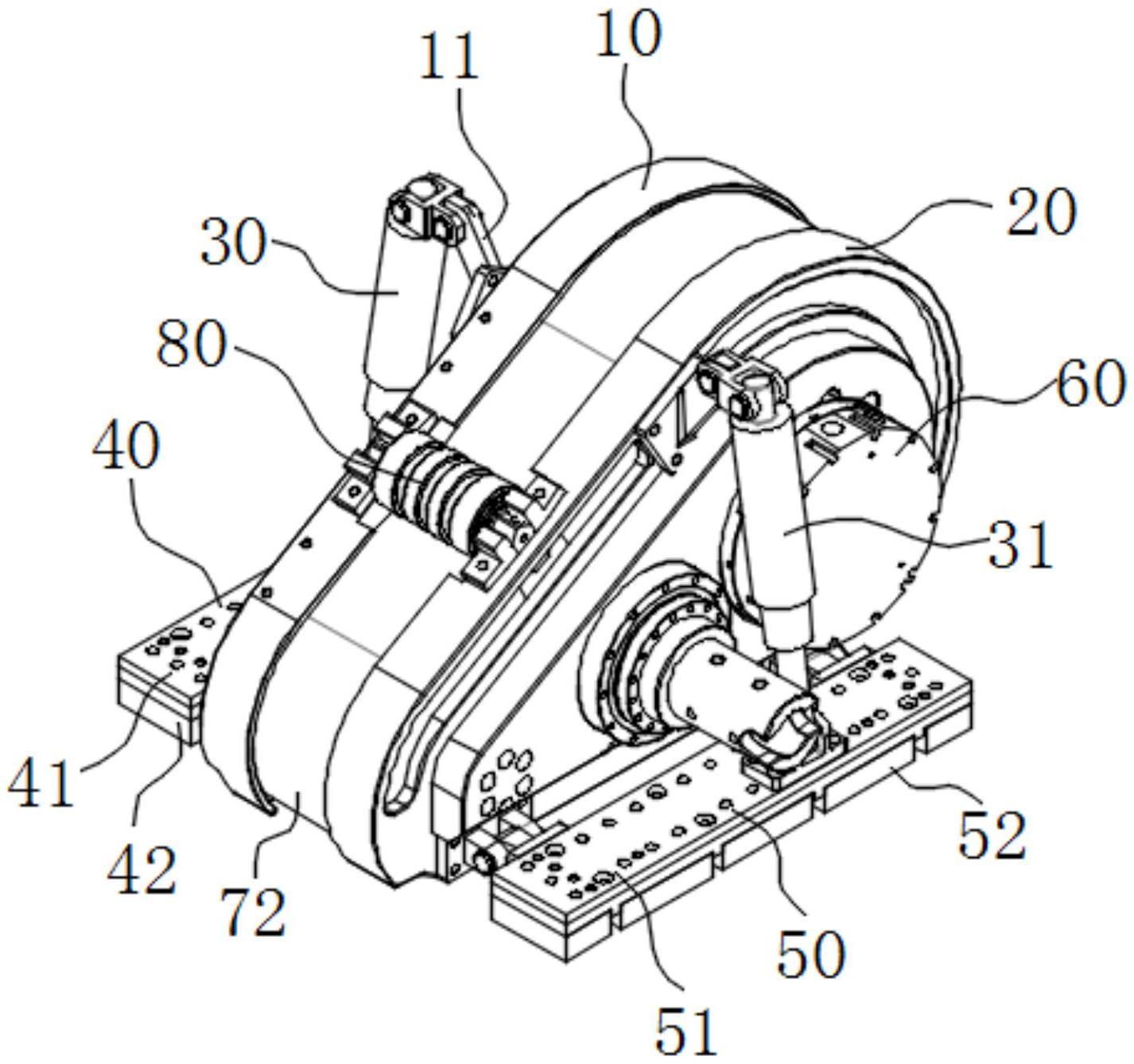
3、履带行走组件,所述履带行走组件包括履带轮、履带以及相对设置的第一侧板和第二侧板,所述履带位于第一侧板与第二侧板之间,所述履带轮带动履带移动以行走在工作壁面上;
4、第一调整单元,所述第一调整单元包括第一驱动组件、第一磁吸附组件和第一锁定组件,所述第一磁吸附组件与第一侧板铰接,所述第一驱动组件驱动所述第一磁吸附组件相对于第一侧板摆动以调整第一磁吸附组件与导磁金属表面的气隙;
5、第二调整单元,所述第二调整单元包括第二驱动组件、第二磁吸附组件和第二锁定组件,所述第二磁吸附组件与第二侧板铰接,所述第二驱动组件驱动所述第二磁吸附组件相对于第二侧板摆动以调整第二磁吸附组件与导磁金属表面的气隙;
6、其中,所述第一调整单元和第二调整单元位于履带行走组件两侧,所述第一驱动组件和第二驱动组件皆为带有自锁力的驱动源。
7、作为优选的,所述第一驱动源为第一电推杆,所述第二驱动源为第二电推杆,所述第一电推杆和第二电推杆皆内置霍尔传感器。
8、作为优选的,所述第一侧板上设置有第一安装座,所述第一电推杆的一端与第一安装座铰接,所述第一电推杆的另一端与第一磁吸附组件铰接。
9、作为优选的,所述第二侧板上设置有第二安装座,所述第二电推杆的一端与第二安装座铰接,所述第二电推杆的另一端与第二磁吸附组件铰接。
10、作为优选的,所述履带轮包括主动轮和从动轮,所述履带环绕主动轮和从动轮设置。
11、作为优选的,所述履带行走模块包括第三驱动源,所述第三驱动源驱动主动轮转动。
12、作为优选的,所述第三驱动源为驱动一体机。
13、作为优选的,所述第一磁吸附组件包括第一安装件和多个第一磁铁,所述第一安装件与第一侧板铰接,多个所述第一磁铁位于第一安装件上;
14、所述第二磁吸附组件包括第二安装件和多个第二磁铁,所述第二安装件与第二侧板铰接,多个所述第二磁铁位于所述第二安装件上。
15、本实用新型公开了一种履带机器人,包括上述的履带式动力模块。
16、进一步的,还包括机架,所述机架底部设置有两个履带式动力模块。
17、本实用新型的上述技术方案相比现有技术具有以下优点:
18、1、本实用新型中,通过第一驱动组件驱动第一磁吸附组件相对于第一侧板做翻转动作,第二驱动组件驱动第二磁吸附组件相对于第二侧板做翻转动作,当第一磁吸附组件和第二磁吸附组件皆翻转至平行于导磁金属表面时,第一磁吸附组件、第二磁吸附组件皆与导磁金属表面之间形成较为均匀的气隙;此时,第一磁吸附组件和第二磁吸附组件皆与导磁金属表面产生磁吸力,如此,可提高履带式动力模块的行走稳定性;当第一驱动组件驱动第一磁吸附组件向上翻转时,可快速卸去第一磁吸附组件与导磁金属表面的磁吸力,当第二驱动组件驱动第二磁吸附组件向上翻转时,则可快速卸去第二磁吸附组件与导磁金属表面的磁吸力。
19、2、本实用新型中,第一调整单元和第二调整单元位于履带行走组件两侧,如此,在履带行走组件工作时,第一调整单元和第二调整单元可根据工作需求调整整个模块与导磁工作壁面之间的磁吸力,如此,稳定性更好,灵活性更高。
20、3、本实用新型中,第一驱动组件和第二驱动组件为带有自锁力的驱动源,如此,当第一驱动组件驱动第一磁吸附组件运动至预设位置时,由于第一驱动组件带有自锁力,如此,第一磁吸附组件即相对于第一侧板固定不动;同样的,第二驱动组件和第二驱动组件为带有自锁力的驱动源,如此,当第二驱动组件驱动第二磁吸附组件运动至预设位置时,由于第二驱动组件带有自锁力,如此,第二磁吸附组件即相对于第二侧板固定不动。
21、4、本实用新型的结构紧凑,稳定性好。
技术特征:
1.一种高适应性的履带式动力模块,其特征在于,包括:
2.根据权利要求1所述的高适应性的履带式动力模块,其特征在于,所述第一驱动组件为第一电推杆,所述第二驱动组件为第二电推杆,所述第一电推杆和第二电推杆皆内置霍尔传感器。
3.根据权利要求2所述的高适应性的履带式动力模块,其特征在于,所述第一侧板上设置有第一安装座,所述第一电推杆的一端与第一安装座铰接,所述第一电推杆的另一端与第一磁吸附组件铰接。
4.根据权利要求2所述的高适应性的履带式动力模块,其特征在于,所述第二侧板上设置有第二安装座,所述第二电推杆的一端与第二安装座铰接,所述第二电推杆的另一端与第二磁吸附组件铰接。
5.根据权利要求1所述的高适应性的履带式动力模块,其特征在于,所述履带轮包括主动轮和从动轮,所述履带环绕主动轮和从动轮设置。
6.根据权利要求5所述的高适应性的履带式动力模块,其特征在于,所述履带行走模块包括第三驱动源,所述第三驱动源驱动主动轮转动。
7.根据权利要求6所述的高适应性的履带式动力模块,其特征在于,所述第三驱动源为驱动一体机。
8.根据权利要求1所述的高适应性的履带式动力模块,其特征在于,所述第一磁吸附组件包括第一安装件和多个第一磁铁,所述第一安装件与第一侧板铰接,多个所述第一磁铁位于第一安装件上;
9.一种履带机器人,其特征在于,包括权利要求1-8任一项所述的履带式动力模块。
10.根据权利要求9所述的履带机器人,其特征在于,还包括机架,所述机架底部设置有两个履带式动力模块。
技术总结
本技术涉及一种高适应性的履带式动力模块及履带机器人,包括:履带行走组件,履带行走组件包括履带轮、履带以及相对设置的第一侧板和第二侧板,履带位于第一侧板与第二侧板之间,履带轮带动履带移动以行走在工作壁面上;第一调整单元,第一调整单元包括第一驱动组件、第一磁吸附组件和第一锁定组件,第一磁吸附组件与第一侧板铰接,第一驱动组件驱动第一磁吸附组件相对于第一侧板摆动;第二调整单元,第二调整单元包括第二驱动组件、第二磁吸附组件和第二锁定组件,第二磁吸附组件与第二侧板铰接,第二驱动组件驱动第二磁吸附组件相对于第二侧板摆动。其能够调节磁吸附组件与金属导磁面的磁吸力,稳定性好,灵活性高。
技术研发人员:周义华,李建伟
受保护的技术使用者:江苏镌极特种设备有限公司
技术研发日:20230224
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!