一种多轮系重载AGV行走小车的制作方法
本技术涉及agv小车,特别是涉及一种多轮系重载agv行走小车。
背景技术:
1、现有agv小车大都是双舵轮双万向轮结构,有的是双舵轮四万向轮,万向轮在行走过程中仅起到分担双舵轮负载的作用,agv当整体的重量过大的情况下,出现设备故障无法正常移动,需要将其转移到安全位置,舵轮自带刹车抱死结构,难以推动,需要电解锁,当设备故障无法保证电解锁,目前大都是先采用千斤顶将agv小车顶起离开地面,再采用坦克车将agv小车牵引至安全位置,操作繁琐。
2、此外,当agv小车行走在复杂道路上时,如有轨道的地方,一般会有凹槽,目前万向轮大都是规则均布的,同一侧万向轮容易卡入凹槽内,小车容易卡死,小车前进过程中车身幅度大,经常抬头、低头,这对负载大的agv小车来说存在安全隐患。
3、基于以上缺陷和不足,有必要对现有的技术予以改进,设计出一种多轮系重载agv行走小车。
技术实现思路
1、本实用新型主要解决的技术问题是提供一种多轮系重载agv行走小车,通过升降舵轮将舵轮升起离开地,使多组万向轮支撑在地面上,将agv小车移动到安全工位处,能够平稳度过轨道凹槽处,控制车身幅度。
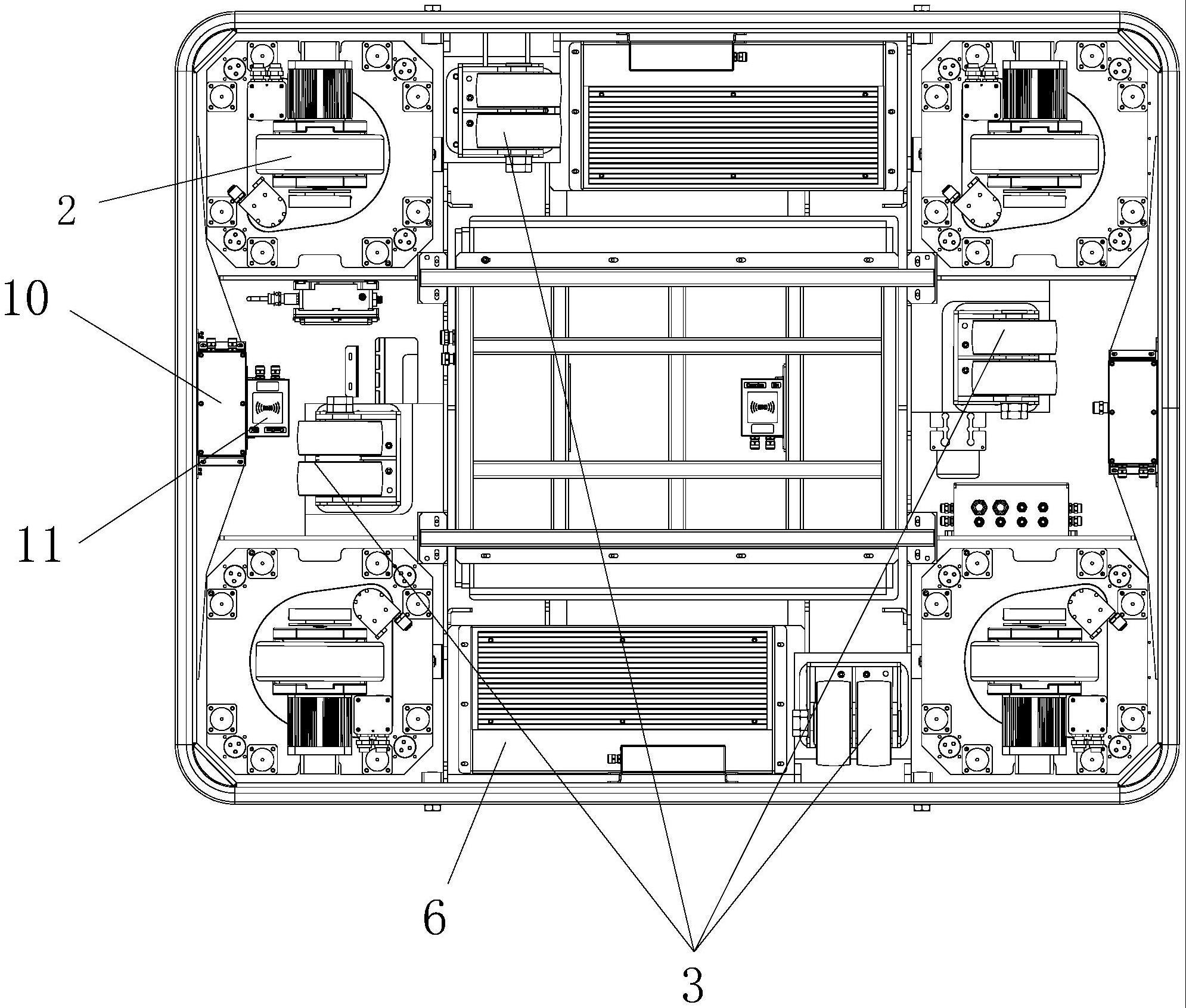
2、为解决上述技术问题,本实用新型采用的一个技术方案是:提供一种多轮系重载agv行走小车,该种多轮系重载agv行走小车包括车架、安装于车架底盘的作为动力单元的舵轮和作为支撑单元的万向轮,所述舵轮至少设置有两组,所述万向轮至少设置有四组,若干组所述万向轮不规则分布于车架底盘,所述舵轮通过升降装置与车架底盘固定连接。
3、优选的是,所述升降装置采用人工手轮驱动丝杆结构。
4、优选的是,所述车架上安装有用于装载货物的对接平台,对接平台两侧设置有用于放置电气件的防爆柜,一侧防爆柜内安装有操作面板,另一侧防爆柜内安装有与外界通信连接的天线。
5、优选的是,所述车架四周安装有用于激光避让的激光避障传感器。
6、优选的是,所述车架底盘安装有用于定位的磁传感器和rfid射频传感器。
7、优选的是,所述车架底盘四周向外延伸设置有安全触边。
8、优选的是,所述车架两侧还安装有便于起吊的吊环。
9、与现有技术相比,本实用新型的有益效果是:
10、采用可升降舵轮和多组向轮相结合结构,通过升降舵轮将舵轮升起离开地,使多组万向轮支撑在地面上,通过多人协助将agv小车移动到安全工位处,解决了重载agv在发生故障时因重量过重不方便移动而影响正系统内其他agv正常工作的问题;
11、至少设置四组万向轮,小车能够平稳度过轨道凹槽位置,避免同侧万向轮卡入凹槽造成卡死问题,减少车身幅度,保证安全。
技术特征:
1.一种多轮系重载agv行走小车,包括车架(1)、安装于车架(1)底盘的作为动力单元的舵轮(2)和作为支撑单元的万向轮(3),其特征在于:所述舵轮(2)至少设置有两组,所述万向轮(3)至少设置有四组,若干组所述万向轮(3)不规则分布于车架(1)底盘,所述舵轮(2)通过升降装置(4)与车架(1)底盘固定连接。
2.根据权利要求1所述的一种多轮系重载agv行走小车,其特征在于:所述升降装置(4)采用人工手轮驱动丝杆结构。
3.根据权利要求1所述的一种多轮系重载agv行走小车,其特征在于:所述车架(1)上安装有用于装载货物的对接平台(5),对接平台(5)两侧设置有用于放置电气件的防爆柜(6),一侧防爆柜(6)内安装有操作面板(7),另一侧防爆柜(6)内安装有与外界通信连接的天线(8)。
4.根据权利要求1所述的一种多轮系重载agv行走小车,其特征在于:所述车架(1)四周安装有用于激光避让的激光避障传感器(9)。
5.根据权利要求1所述的一种多轮系重载agv行走小车,其特征在于:所述车架(1)底盘安装有用于定位的磁传感器(10)和rfid射频传感器(11)。
6.根据权利要求1所述的一种多轮系重载agv行走小车,其特征在于:所述车架(1)底盘四周向外延伸设置有安全触边(12)。
7.根据权利要求1所述的一种多轮系重载agv行走小车,其特征在于:所述车架(1)两侧还安装有便于起吊的吊环(13)。
技术总结
本技术公开了一种多轮系重载AGV行走小车,包括车架、安装于车架底盘的作为动力单元的舵轮和作为支撑单元的万向轮,所述舵轮至少设置有两组,所述万向轮至少设置有四组,若干组所述万向轮不规则分布于车架底盘,所述舵轮通过升降装置与车架底盘固定连接。通过上述方式,本技术结构简单,通过升降舵轮将舵轮升起离开地,使多组万向轮支撑在地面上,将AGV小车移动到安全工位处,能够平稳度过轨道凹槽处,控制车身幅度。
技术研发人员:马春岭,聂勇刚,邓钞,李津
受保护的技术使用者:健芮智能科技(昆山)有限公司
技术研发日:20230315
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!