一种应用于打桩机器人的爬行机构的制作方法
本技术涉及机器人的爬行机构,具体为一种应用于打桩机器人的爬行机构。
背景技术:
1、打桩机器人是一种能够自主进行打桩工作的机器人,机器人主体由金属材料制成,能够承受较大的载荷和惯性力,打桩机器人能够在室外环境中进行自主导航和定位,并对周边环境进行分析,在指定地点进行打桩。
2、但是现有的打桩机器人在使用时,由于机器人的工作环境多样,很多复杂的地形不适合用传动履带进行传动。
3、于是,有鉴于此,针对现有的结构不足予以研究改良,提出一种应用于打桩机器人的爬行机构。
技术实现思路
1、本实用新型的目的在于提供一种应用于打桩机器人的爬行机构,以解决上述背景技术中提出的问题。
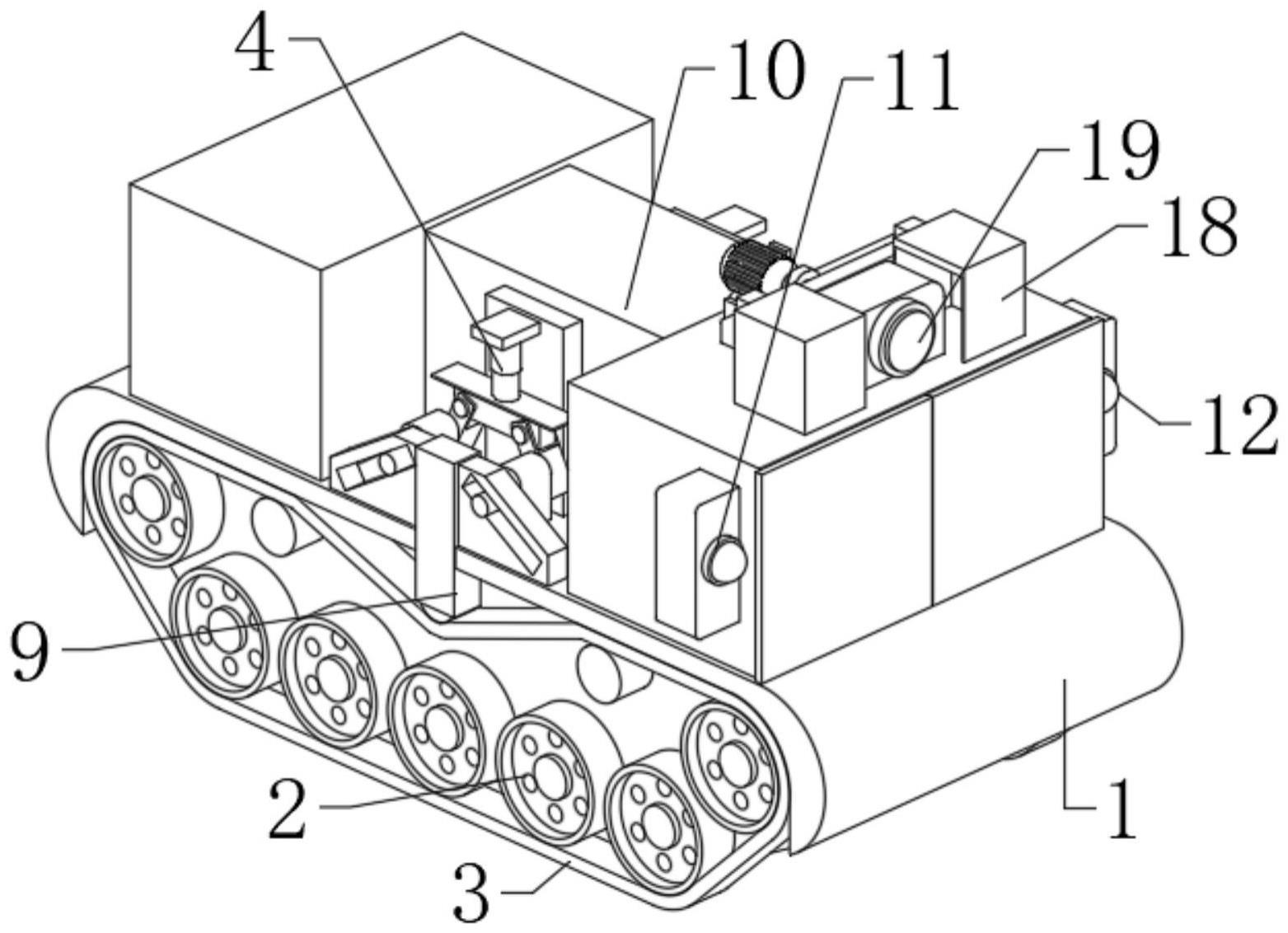
2、为实现上述目的,本实用新型提供如下技术方案:一种应用于打桩机器人的爬行机构,包括机座,所述机座的侧面固定连接有传动轮,所述传动轮的表面贴合有传动履带,所述机座的内壁滑动连接有限位板,所述机座的顶部固定连接有电动推杆,所述电动推杆的输出端固定连接有传动板,所述传动板的底部旋转连接有活动板,所述活动板的表面旋转连接有滑板,所述滑板的表面滑动连接有和限位板固定连接的受力板。
3、所述机座的顶部安装有机架,所述机架的左侧设置有输入模块,所述机架的右侧设置有输出模块,所述机架的顶部固定连接有电机,所述电机的输出端固定连接有旋转板,所述旋转板的表面固定连接有凸杆,所述凸杆的表面滑动连接有衔接板,所述衔接板的侧面固定连接有防护罩,所述防护罩的一侧位于机架的顶部固定连接有摄像头。
4、进一步的,所述限位板的底部旋转连接有和传动履带紧密贴合的滑轮,所述传动履带通过限位板构成紧绷状态。
5、进一步的,所述活动板关于传动板的中点对称设置有两组,两组所述活动板呈“八”字形结构设置。
6、进一步的,所述滑板的表面设置有与自身相垂直的衔接杆,所述衔接杆嵌入进受力板内壁的斜槽内部。
7、进一步的,所述衔接板的内部设置有与凸杆尺寸相匹配的竖向滑槽。
8、进一步的,所述摄像头位于防护罩的运动轨迹上。
9、与现有技术相比,本实用新型的有益效果是:
10、1.通过设置滑板,因为滑板的表面设置有嵌入进受力板内部的衔接杆,所以在滑板运动时,会对受力板向上施加拉力,使得受力板带动与自身固定连接的限位板沿着机座的内壁向上滑动,此时限位板便不再对传动履带起到固定作用,传动履带此时不再处于紧绷状态,即可从传动轮上拆卸下来,实现更换爬行方式的目的。
11、2.通过设置摄像头,摄像头可对周边施工现场的环境进行勘测,由于施工现场灰尘很多,为了对摄像头进行防护,可打开电机控制旋转板进行旋转,旋转板在旋转时,会带动凸杆进行旋转,凸杆在旋转时,会沿着衔接板的内部进行滑动,并对衔接板向机架的中心处施加拉力,使得衔接板带动防护罩同步运动,衔接板运动时,会带动防护罩同步运动,随后防护罩会将摄像头罩起来,起到防护的目的。
技术特征:
1.一种应用于打桩机器人的爬行机构,包括机座(1),其特征在于:所述机座(1)的侧面固定连接有传动轮(2),所述传动轮(2)的表面贴合有传动履带(3),所述机座(1)的内壁滑动连接有限位板(9),所述机座(1)的顶部固定连接有电动推杆(4),所述电动推杆(4)的输出端固定连接有传动板(5),所述传动板(5)的底部旋转连接有活动板(6),所述活动板(6)的表面旋转连接有滑板(7),所述滑板(7)的表面滑动连接有和限位板(9)固定连接的受力板(8)。
2.根据权利要求1所述的一种应用于打桩机器人的爬行机构,其特征在于,所述机座(1)的顶部安装有机架(10),所述机架(10)的左侧设置有输入模块(11),所述机架(10)的右侧设置有输出模块(12),所述机架(10)的顶部固定连接有电机(13),所述电机(13)的输出端固定连接有旋转板(14),所述旋转板(14)的表面固定连接有凸杆(15),所述凸杆(15)的表面滑动连接有衔接板(16),所述衔接板(16)的侧面固定连接有防护罩(17),所述防护罩(17)的一侧位于机架(10)的顶部固定连接有摄像头(18)。
3.根据权利要求1所述的一种应用于打桩机器人的爬行机构,其特征在于,所述限位板(9)的底部旋转连接有和传动履带(3)紧密贴合的滑轮,所述传动履带(3)通过限位板(9)构成紧绷状态。
4.根据权利要求1所述的一种应用于打桩机器人的爬行机构,其特征在于,所述活动板(6)关于传动板(5)的中点对称设置有两组,两组所述活动板(6)呈“八”字形结构设置。
5.根据权利要求1所述的一种应用于打桩机器人的爬行机构,其特征在于,所述滑板(7)的表面设置有与自身相垂直的衔接杆,所述衔接杆嵌入进受力板(8)内壁的斜槽内部。
6.根据权利要求2所述的一种应用于打桩机器人的爬行机构,其特征在于,所述衔接板(16)的内部设置有与凸杆(15)尺寸相匹配的竖向滑槽。
7.根据权利要求2所述的一种应用于打桩机器人的爬行机构,其特征在于,所述摄像头(18)位于防护罩(17)的运动轨迹上。
技术总结
本技术公开了一种应用于打桩机器人的爬行机构,涉及机器人的爬行机构技术领域,包括机座,所述机座的侧面固定连接有传动轮,所述传动轮的表面贴合有传动履带,所述机座的内壁滑动连接有限位板,所述机座的顶部固定连接有电动推杆,所述电动推杆的输出端固定连接有传动板,所述传动板的底部旋转连接有活动板,通过设置滑板,因为滑板的表面设置有嵌入进受力板内部的衔接杆,所以在滑板运动时,会对受力板向上施加拉力,使得受力板带动与自身固定连接的限位板沿着机座的内壁向上滑动,此时限位板便不再对传动履带起到固定作用,传动履带此时不再处于紧绷状态,即可从传动轮上拆卸下来,实现更换爬行方式的目的。
技术研发人员:许盈辰
受保护的技术使用者:苏州毕诚智造科技有限公司
技术研发日:20230518
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!