一种车体检测机器人底盘的制作方法
本技术属于机器人底盘,尤其是涉及一种车体检测机器人底盘。
背景技术:
1、机器人(robot)是一种能够半自主或全自主工作的智能机器,能够通过编程和自动控制来执行诸如作业或移动等任务,其具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作;机器人在行驶过程中,地面也会存在一些可能影响机器人行进的障碍物,由于相关技术中的机器人车体底盘缺乏对障碍物的跃障能力,容易出现机器人通过性较差以及机器人车体在跃障过程中出现的震动较大的问题,进而导致机器人寿命降低。
技术实现思路
1、有鉴于此,本实用新型旨在至少在一定程度上解决相关技术问题之一。
2、为达到上述目的,本实用新型的技术方案是这样实现的:
3、一种车体检测机器人底盘,包括底盘安装架、2个履带、2个轮组固定架及2套轮组结构;
4、每一所述履带内侧均对应设置一个所述轮组固定架,每一所述轮组固定架上对应设置一套所述轮组结构;
5、所述轮组结构包括驱动轮组、导向轮组及至少一套减震轮组,所述驱动轮组、导向轮组及减震轮组均设置在所述轮组固定架上,所述驱动轮组、导向轮组及减震轮组均与所述履带内侧啮合;
6、所述减震轮组包括第一转轴、复位机构、2个连接支臂及2个减震轮结构,2个所述连接支臂通过所述第一转轴与所述轮组固定架连接,2个所述连接支臂对称设置在所述轮组固定架两侧,每一所述连接支臂均与2个所述减震轮结构转动连接,当所述连接支臂相对所述轮组固定架出现转动时;
7、所述复位机构包括扭簧、第一支撑结构及第二支撑结构,所述扭簧套设在所述第一转轴外侧,所述扭簧一端抵住所述轮组固定架,所述扭簧另一端抵住一个所述减震轮结构的转轴,所述第一支撑结构及第二支撑结构均设置在所述轮组固定架上;
8、所述底盘安装架设置在2个所述履带之间,所述驱动轮组的转轴通过连接支架与所述底盘安装架连接。
9、进一步的,所述轮组固定架包括导向轮固定架及驱动轮固定架,所述导向轮固定架一端与所述导向轮组连接,所述导向轮固定架另一端与所述驱动轮固定架铰接,所述驱动轮组设置在所述驱动轮固定架顶部,所述减震轮组设置在所述驱动轮固定架底部,所述第一支撑结构一端与所述导向轮固定架铰接,所述第一支撑结构另一端与所述驱动轮固定架顶部铰接,所述第二支撑结构一端与所述导向轮固定架顶部固接,所述第二支撑结构另一端与所述导向轮固定架底部固接。
10、进一步的,所述第一支撑结构包括固定基座及液压杆,所述固定基座与所述导向固定架顶部固接,所述液压杆一端与所述固定基座铰接,所述液压杆另一端与所述导向轮固定架铰接,所述第一支撑结构与第二支撑结构的结构相同。
11、进一步的,所述第一支撑结构包括固定基座、支撑框架、滑杆、限位板、第一缓冲弹簧及第二缓冲弹簧,所述固定基座与所述导向固定架顶部固接,所述支撑框架与所述导向轮固定架铰接,所述滑杆一端设置所述限位板,所述滑杆另一端与所述固定基座铰接,所述第一缓冲弹簧一端抵住所述限位板,所述第一缓冲弹簧另一端抵住所述支撑框架内侧,所述第二缓冲弹簧一端抵住所述支撑框架外侧,所述第二缓冲弹簧另一端抵住所述固定基座,所述第一支撑结构与第二支撑结构的结构相同。
12、进一步的,所述减震轮组数量为2个,2个所述减震轮组均设置在所述轮组固定架底部。
13、进一步的,所述减震轮结构包括第二转轴及2个减震轮,2个所述减震轮设置在所述第二转轴上,所述第二转轴与2个所述连接支臂转动连接。
14、进一步的,所述连接支臂为v型,所述连接支臂的开口向下。
15、进一步的,所述连接支架上对称设有2个第一减重孔。
16、进一步的,所述连接支臂上对称设有2个第二减重孔。
17、进一步的,所述底盘安装架上对称设有2个能够与机器人车体配合的连接轴,每一所述连接轴上均套设一个侧顶弹簧。
18、相对于现有技术,本实用新型所述的一种车体检测机器人底盘具有以下优势:
19、本实用新型所述的一种车体检测机器人底盘,通过扭簧能够对连接支臂进行复位,进而能够实现机器人车体在行驶过程中减震轮组随着障碍物外形产生微调,有效较小机器人车体的震动幅度并且提高机器人的跃障能力;通过第一减重孔及第二减重孔能够减轻连接支臂及连接支架的重量;通过设置在连接轴上的侧顶弹簧,进而能够进一步对车体起到减震的作用。
技术特征:
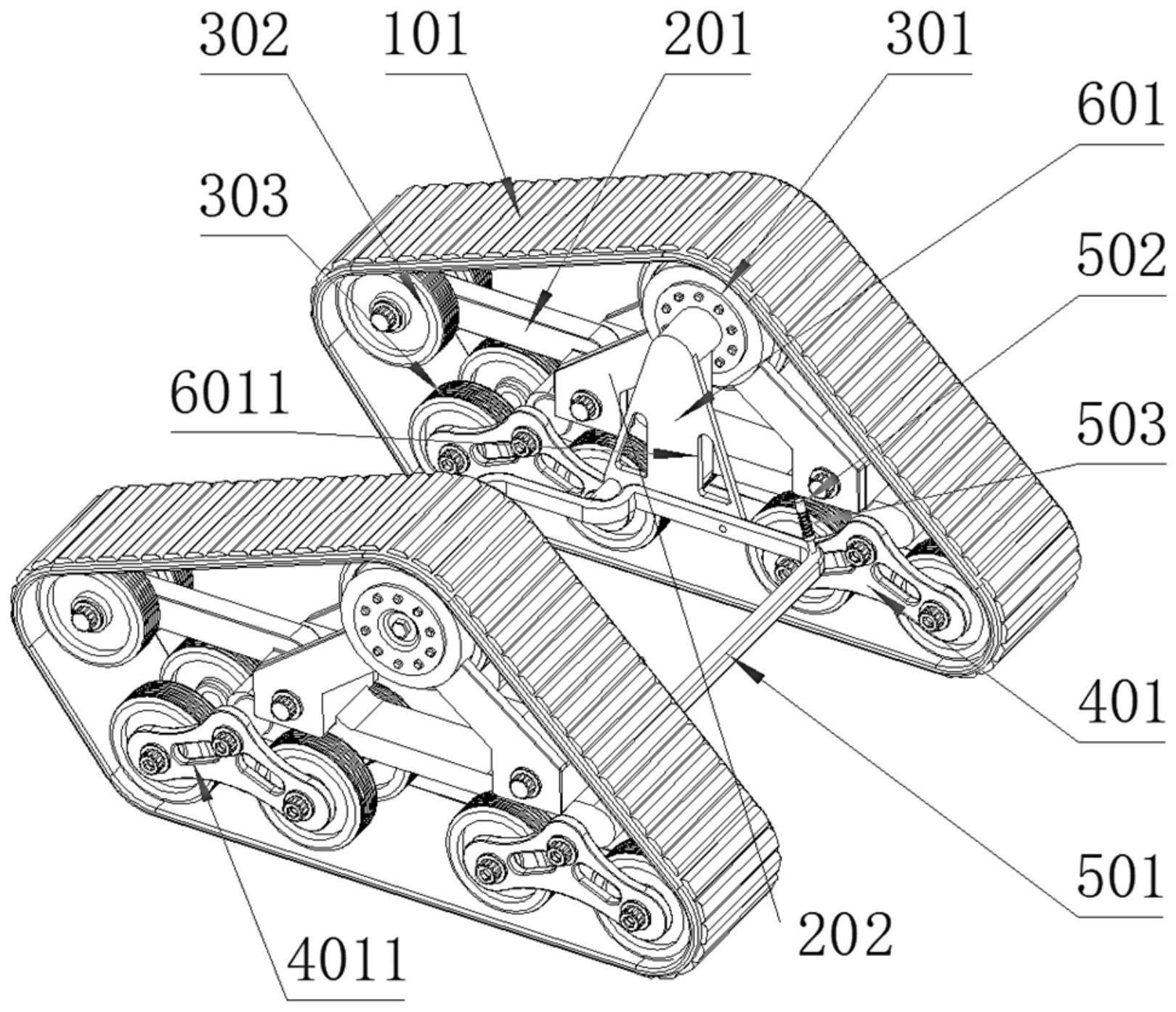
1.一种车体检测机器人底盘,其特征在于:包括底盘安装架(501)、2个履带(101)、2个轮组固定架及2套轮组结构;
2.根据权利要求1所述的一种车体检测机器人底盘,其特征在于:所述轮组固定架包括导向轮固定架(201)及驱动轮固定架(202),所述导向轮固定架(201)一端与所述导向轮组(302)连接,所述导向轮固定架(201)另一端与所述驱动轮固定架(202)铰接,所述驱动轮组(301)设置在所述驱动轮固定架(202)顶部,所述减震轮组设置在所述驱动轮固定架(202)底部,所述第一支撑结构一端与所述导向轮固定架(201)铰接,所述第一支撑结构另一端与所述驱动轮固定架(202)顶部铰接,所述第二支撑结构一端与所述导向轮固定架(201)顶部固接,所述第二支撑结构另一端与所述导向轮固定架(201)底部固接。
3.根据权利要求2所述的一种车体检测机器人底盘,其特征在于:所述第一支撑结构包括固定基座(10)及液压杆,所述固定基座(10)与所述导向固定架顶部固接,所述液压杆一端与所述固定基座(10)铰接,所述液压杆另一端与所述导向轮固定架(201)铰接,所述第一支撑结构与第二支撑结构的结构相同。
4.根据权利要求2所述的一种车体检测机器人底盘,其特征在于:所述第一支撑结构包括固定基座(10)、支撑框架(30)、滑杆(31)、限位板、第一缓冲弹簧(32)及第二缓冲弹簧(33),所述固定基座(10)与所述导向固定架顶部固接,所述支撑框架(30)与所述导向轮固定架(201)铰接,所述滑杆(31)一端设置所述限位板,所述滑杆(31)另一端与所述固定基座(10)铰接,所述第一缓冲弹簧(32)一端抵住所述限位板,所述第一缓冲弹簧(32)另一端抵住所述支撑框架(30)内侧,所述第二缓冲弹簧(33)一端抵住所述支撑框架(30)外侧,所述第二缓冲弹簧(33)另一端抵住所述固定基座(10),所述第一支撑结构与第二支撑结构的结构相同。
5.根据权利要求1所述的一种车体检测机器人底盘,其特征在于:所述减震轮组数量为2个,2个所述减震轮组均设置在所述轮组固定架底部。
6.根据权利要求1所述的一种车体检测机器人底盘,其特征在于:所述减震轮结构(303)包括第二转轴及2个减震轮,2个所述减震轮设置在所述第二转轴上,所述第二转轴与2个所述连接支臂(401)转动连接。
7.根据权利要求1所述的一种车体检测机器人底盘,其特征在于:所述连接支臂(401)为v型,所述连接支臂(401)的开口向下。
8.根据权利要求1-7任一项所述的一种车体检测机器人底盘,其特征在于:所述连接支架(601)上对称设有2个第一减重孔(6011)。
9.根据权利要求8所述的一种车体检测机器人底盘,其特征在于:所述连接支臂(401)上对称设有2个第二减重孔(4011)。
10.根据权利要求8所述的一种车体检测机器人底盘,其特征在于:所述底盘安装架(501)上对称设有2个能够与机器人车体配合的连接轴(502),每一所述连接轴(502)上均套设一个侧顶弹簧(503)。
技术总结
本技术提供了一种车体检测机器人底盘,包括底盘安装架、2个履带、2个轮组固定架及2套轮组结构;每一履带内侧均对应设置一个轮组固定架,每一轮组固定架上对应设置一套轮组结构;轮组结构包括驱动轮组、导向轮组及至少一套减震轮组,驱动轮组、导向轮组及减震轮组均与履带内侧啮合;减震轮组包括第一转轴、复位机构、2个连接支臂及2个减震轮结构,当连接支臂相对轮组固定架出现转动时,复位机构用于对连接支臂进行复位。本技术所述的一种车体检测机器人底盘,由于相关技术中的机器人车体底盘缺乏对障碍物的跃障能力,容易出现机器人通过性较差以及机器人车体在跃障过程中出现的震动较大的问题。
技术研发人员:王欣
受保护的技术使用者:天津开发区玲达盛钰科技有限公司
技术研发日:20230518
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!