爬楼梯机器人
本发明涉及一种爬楼梯机器人。
背景技术:
1、机器人控制的移动平台可以用于在危险或敌对条件下检查或搜索建筑物。可以通过提供关于对手的位置、活动和能力的详细信息来改善危险情况。军事应用可以包括侦察、监视、炸弹处置和安全巡逻。民用可以包括货物配送,辅助老年人生活。在机器人的爬楼梯能力方面寻求进步是机器人研发工程师的共识。
技术实现思路
1、本发明提供一种爬楼梯机器人,解决了机器人自由上下楼梯的问题。
2、根据本发明实施例的一方面,提供一种爬楼梯机器人,包括:
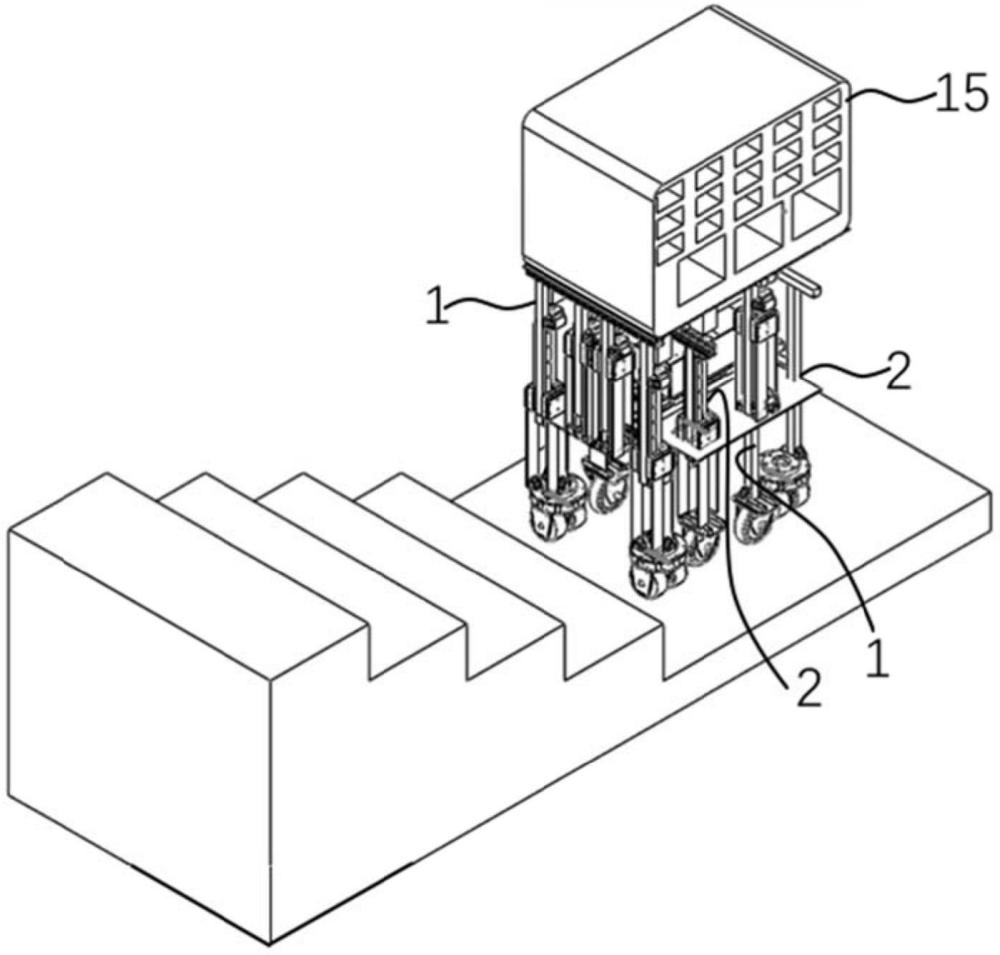
3、前机架,所述前机架上具有对其进行支撑的第一前脚轮和第一后脚轮,以及升降所述第一前脚轮的第一直线模组;
4、后机架,所述后机架上具有对其进行支撑的第二前脚轮和第二后脚轮,以及升降所述第二前脚轮的第二直线模组,所述第一后脚轮位于所述第二前脚轮和所述第二后脚轮之间,所述第二前脚轮位于所述第一前脚轮和所述第一后脚轮之间,所述后机架与所述前机架活动连接能够相对升降,使得所述前机架的所述第一前脚轮和所述第一后脚轮悬空时,所述后机架的所述第二前脚轮和所述第二后脚轮支撑所述机器人,所述后机架的所述第二前脚轮和所述第二后脚轮悬空时,所述前机架的所述第一前脚轮和所述第一后脚轮支撑所述机器人;以及
5、多个第三直线模组,其在所述机器人上下楼梯时交替升降所述前机架和所述后机架。
6、在一些示例中,所述后机架上设有调节所述机器人重心的配重。
7、在一些示例中,所述配重能够沿着与所述机器人直线运动的同方向或反方向移动。
8、在一些示例中,所述配重为给所述机器人供电的电池。
9、在一些示例中,所述前机架的顶部安装有货架。
10、在一些示例中,所述第一前脚轮和所述第二后脚轮分别连接有驱动电机。
技术特征:
1.一种爬楼梯机器人,其特征在于,包括:
2.根据权利要求1所述的爬楼梯机器人,其特征在于,所述后机架上设有调节所述机器人重心的配重。
3.根据权利要求2所述的爬楼梯机器人,其特征在于,所述配重能够沿着与所述机器人直线运动的同方向或反方向移动。
4.根据权利要求2或3所述的爬楼梯机器人,其特征在于,所述配重为给所述机器人供电的电池。
5.根据权利要求1所述的爬楼梯机器人,其特征在于,所述前机架的顶部安装有货架。
6.根据权利要求1所述的爬楼梯机器人,其特征在于,所述第一前脚轮和所述第二后脚轮分别连接有驱动电机。
技术总结
本发明公开了一种爬楼梯机器人,解决了机器人自由上下楼梯的问题。机器人包括:前机架,前机架上具有对其进行支撑的第一前脚轮和第一后脚轮以及升降第一前脚轮的第一直线模组;后机架,后机架上具有对其进行支撑的第二前脚轮和第二后脚轮以及升降第二前脚轮的第二直线模组,第一后脚轮位于第二前脚轮和第二后脚轮之间,第二前脚轮位于第一前脚轮和第一后脚轮之间,后机架与前机架活动连接能够相对升降,使得前机架的第一前脚轮和第一后脚轮悬空时后机架的第二前脚轮和第二后脚轮支撑机器人,后机架的第二前脚轮和第二后脚轮悬空时前机架的第一前脚轮和第一后脚轮支撑机器人;多个第三直线模组,其在机器人上下楼梯时交替升降前机架和后机架。
技术研发人员:蔺世杰,时干
受保护的技术使用者:西北工业大学
技术研发日:20230615
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!