爬行机器人的制作方法
本技术涉及机器人,具体涉及一种爬行机器人。
背景技术:
1、爬行机器人是可以自动爬行完成作业的机器人,是移动机器人的一种。爬壁机器人是爬行机器人的一种,能够沿垂直墙壁上下爬行。
2、如中国实用新型专利(cn219361202u)公开了一种自适应壁面步进移动机器人,底盘底部设置有呈十字形交叉布置的两组行走模块,两组行走模块的两端均设置有吸附模块,吸附模块包括升降组件以及安装在升降组件端部的吸附组件,且升降组件与吸附组件之间采用万向连接。
3、采用十字形交叉布置的两组行走模块,不仅整体体积大,而且行走模块通过电机驱动,配合齿轮、齿条等结构实现移动,结构较为复杂,另外其通过吸附组件端部的万向连接以适应具有一定弧度的壁面,但是调整范围小,仅适合小幅度调整,无法适用于大幅度的弧形壁面的爬行,比如环形管道。
技术实现思路
1、为了克服背景技术的不足,本实用新型提供一种爬行机器人。
2、本实用新型所采用的技术方案:一种爬行机器人,包括两个相互套接且相互之间构成滑移配合的筒体,两个筒体内部设有能驱使两个筒体相互收拢或伸长的第一驱动单元;每个筒体的左右两侧均设有若干能伸缩动作的支撑脚,所述支撑脚与筒体之间通过第一铰链连接,所述支撑脚能相对筒体左右摆动,所述支撑脚的端部设有吸附单元。
3、两个筒体分别为第一筒体、第二筒体,所述第一驱动单元采用气缸,其包括第一缸体与第一活塞杆,所述第一缸体的两端均与第一筒体连接,所述第一活塞杆一端伸入第一缸体,另一端与第二筒体固定连接。
4、另外,所述第一驱动单元采用电机螺杆传动单元,其包括螺杆、螺杆座、螺母、电机,所述螺母与第一筒体固定连接,所述螺杆座、电机与第二筒体固定连接,所述螺杆与螺母螺纹配合,且所述螺杆一端与螺杆座旋转连接,另一端连接电机。
5、所述支撑脚采用气缸,所述支撑脚包括第二缸体与第二活塞杆,所述第二缸体与筒体通过第一铰链连接,所述第二活塞杆上端伸入第二缸体,下端与吸附单元连接。
6、每个支撑脚底部均设有支撑板,所述支撑板底部设有多组吸附单元,且所述吸附单元与支撑板活动连接。
7、多组吸附单元沿左右方向并列设置在支撑板底部,且所述吸附单元与支撑板之间通过第二铰链连接,所述吸附单元能相对支撑板左右摆动。
8、所述吸附单元采用磁体。
9、每个筒体均连接有4支支撑脚。
10、本实用新型的有益效果是:采用以上方案,仅仅通过两个相互套接的筒体的伸缩动作,并配合多个支撑脚的伸缩动作,便可实现直线爬行的目的,结构更加紧凑简单,同时支撑脚与筒体之间通过第一铰链连接,支撑脚能够相对筒体左右摆动,从而能够更好地匹配不同直径的管道,能够更好地沿管道进行爬行。
技术特征:
1.一种爬行机器人,其特征在于:包括两个相互套接且相互之间构成滑移配合的筒体(1),两个筒体(1)内部设有能驱使两个筒体(1)相互收拢或伸长的第一驱动单元(2);
2.根据权利要求1所述的爬行机器人,其特征在于:两个筒体分别为第一筒体(11)、第二筒体(12),
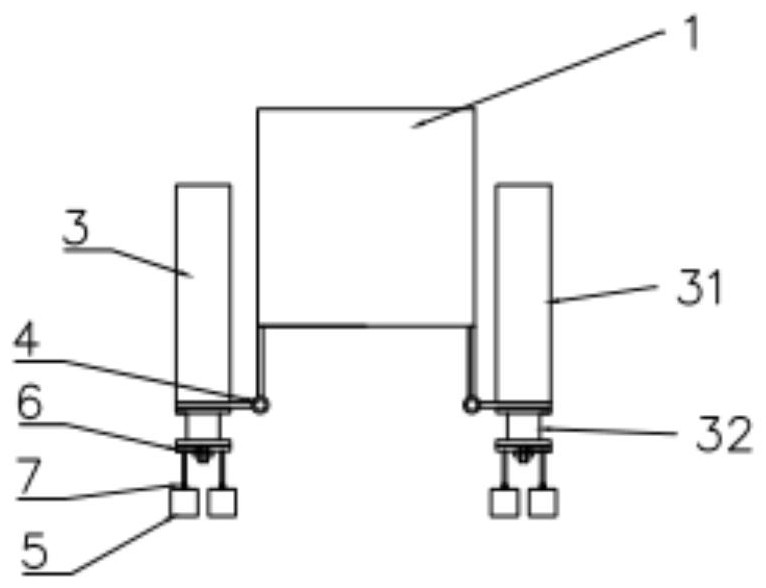
3.根据权利要求1所述的爬行机器人,其特征在于:所述支撑脚(3)采用气缸,所述支撑脚(3)包括第二缸体(31)与第二活塞杆(32),所述第二缸体(31)与筒体(1)通过第一铰链(4)连接,所述第二活塞杆(32)上端伸入第二缸体(31),下端与吸附单元(5)连接。
4.根据权利要求1所述的爬行机器人,其特征在于:每个支撑脚(3)底部均设有支撑板(6),所述支撑板(6)底部设有多组吸附单元(5),且所述吸附单元(5)与支撑板(6)活动连接。
5.根据权利要求4所述的爬行机器人,其特征在于:多组吸附单元(5)沿左右方向并列设置在支撑板(6)底部,且所述吸附单元(5)与支撑板(6)之间通过第二铰链(7)连接,所述吸附单元(5)能相对支撑板(6)左右摆动。
6.根据权利要求1所述的爬行机器人,其特征在于:所述吸附单元(5)采用磁体。
7.根据权利要求1所述的爬行机器人,其特征在于:每个筒体(1)均连接有4支支撑脚(3)。
8.根据权利要求1所述的爬行机器人,其特征在于:两个筒体分别为第一筒体(11)、第二筒体(12),
技术总结
一种爬行机器人,其特征在于:包括两个相互套接且相互之间构成滑移配合的筒体,两个筒体内部设有能驱使两个筒体相互收拢或伸长的第一驱动单元;每个筒体的左右两侧均设有若干能伸缩动作的支撑脚,支撑脚与筒体之间通过第一铰链连接,支撑脚能相对筒体左右摆动,支撑脚的端部设有吸附单元。采用以上方案,仅仅通过两个相互套接的筒体的伸缩动作,并配合多个支撑脚的伸缩动作,便可实现直线爬行的目的,结构更加紧凑简单,同时支撑脚与筒体之间通过第一铰链连接,支撑脚能够相对筒体左右摆动,从而能够更好地匹配不同直径的管道,能够更好地沿管道进行爬行。
技术研发人员:刘峰,刘佳晨
受保护的技术使用者:嘉兴超唯环保科技股份有限公司
技术研发日:20230823
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!