一种履带移动的机器人的制作方法
本技术涉及履带式机器人,特别是涉及一种履带移动的机器人。
背景技术:
1、履带式机器人是一种通过履带运动实现机器人移动的机器人,它广泛应用于野外非结构化场景中,例如农业、林业、消防救援等领域;
2、与其他类型的机器人相比,履带式机器人具有更好的越障能力和稳定性,它采用履带来代替传统的轮子,在各种地形或环境下都能够保持良好的移动性能,此外,由于其较大的自重和接地面积,可以更好地承受重负荷,因此在针对搬运物品等任务时有着较大的优势;
3、现有的履带机器人上的履带在安装过后,需要将履带拉紧,进而使履带不易掉落,现有的方式主要通过机构将履带向上拉或者向下压,这样就导致了履带的弯曲程度较大,在运动过程中产生的更多的磨损,故需要对此做出改进。
技术实现思路
1、本实用新型提供了一种履带移动的机器人,解决了上述背景技术中提出的技术问题。
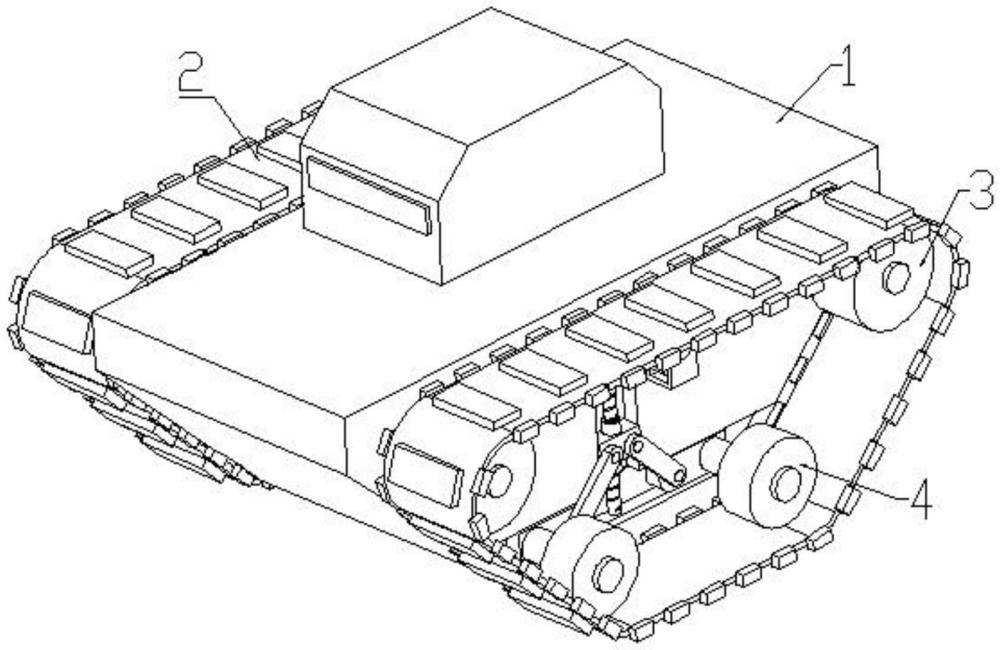
2、本实用新型解决上述技术问题的方案如下:包括底盘主体,所述底盘主体的两侧外壁均安装有多个传动轮,且传动轮呈对称分布,位于同一侧的两个所述传动轮上安装有同一个履带主体;
3、所述底盘主体的两侧外壁均开设有安装槽和滑槽,所述滑槽与安装槽相连通,所述安装槽中安装有调节组件,所述滑槽中安装有活动组件,所述活动组件上转动连接有下支撑轮,所述调节组件用于对活动组件及下支撑轮的位置进行调节。
4、在上述技术方案的基础上,本实用新型还可以作如下改进。
5、优选的,所述活动组件包括多个滑块,所述滑块滑动安装在滑槽中,所述下支撑轮转动安装滑块远离滑槽的一侧外壁上。
6、优选的,所述调节组件包括升降块,所述安装槽的顶部内壁固定连接有螺纹杆,且螺纹杆的底部外壁与滑槽的内壁固定连接,所述升降块滑动安装在螺纹杆上,所述滑块远离滑槽的一侧外壁铰接有连接杆,且连接杆远离滑块的一端与升降块相铰接。
7、优选的,所述调节组件还包括多个第二固定套,所述第二固定套与螺纹杆的外壁通过螺纹连接,所述升降块的顶部外壁和底部外壁均匀第二固定套相接触。
8、优选的,所述调节组件还包括调节块,所述调节块滑动安装在螺纹杆上,所述调节块上转动安装有上支撑轮,且上支撑轮与履带主体相接触,所述螺纹杆的外壁通过螺纹连接有第一固定套,所述第一固定套与调节块的底部外壁紧密贴合。
9、优选的,所述调节块的外壁通过螺纹连接有多个压紧螺钉。
10、本实用新型的有益效果是:本实用新型提供了一种履带移动的机器人,具有以下优点:
11、1、本实用新型,通过设置有下支撑轮,两组下支撑轮在对底盘主体及履带主体起到支撑作用的同时,在调节组件和活动组件的作用下,可以沿着滑槽的内壁滑动,进而将履带主体拉紧,拉紧后的履带主体不会过度地弯曲,进而大大减小了履带主体使用过程中产生的磨损。
12、2、本实用新型,通过设置有上支撑轮,上支撑轮也是调节组件的一部分,主要用于对履带主体起到支撑的效果,减少了履带主体在重力作用下的向下落的趋势;
13、同时,在下支撑轮运动到最大幅度时,履带主体依然没有被拉紧情况下,可以将上支撑轮向上调动,通过上支撑轮将履带主体进行拉紧。
14、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。本实用新型的具体实施方式由以下实施例及其附图详细给出。
技术特征:
1.一种履带移动的机器人,包括底盘主体(1),其特征在于,所述底盘主体(1)的两侧外壁均安装有多个传动轮(3),且传动轮(3)呈对称分布,位于同一侧的两个所述传动轮(3)上安装有同一个履带主体(2);
2.根据权利要求1所述一种履带移动的机器人,其特征在于,所述活动组件包括多个滑块(5),所述滑块(5)滑动安装在滑槽(6)中,所述下支撑轮(4)转动安装滑块(5)远离滑槽(6)的一侧外壁上。
3.根据权利要求2所述一种履带移动的机器人,其特征在于,所述调节组件包括升降块(15),所述安装槽(9)的顶部内壁固定连接有螺纹杆(7),且螺纹杆(7)的底部外壁与滑槽(6)的内壁固定连接,所述升降块(15)滑动安装在螺纹杆(7)上,所述滑块(5)远离滑槽(6)的一侧外壁铰接有连接杆(8),且连接杆(8)远离滑块(5)的一端与升降块(15)相铰接。
4.根据权利要求3所述一种履带移动的机器人,其特征在于,所述调节组件还包括多个第二固定套(14),所述第二固定套(14)与螺纹杆(7)的外壁通过螺纹连接,所述升降块(15)的顶部外壁和底部外壁均匀第二固定套(14)相接触。
5.根据权利要求4所述一种履带移动的机器人,其特征在于,所述调节组件还包括调节块(11),所述调节块(11)滑动安装在螺纹杆(7)上,所述调节块(11)上转动安装有上支撑轮(12),且上支撑轮(12)与履带主体(2)相接触,所述螺纹杆(7)的外壁通过螺纹连接有第一固定套(13),所述第一固定套(13)与调节块(11)的底部外壁紧密贴合。
6.根据权利要求5所述一种履带移动的机器人,其特征在于,所述调节块(11)的外壁通过螺纹连接有多个压紧螺钉(10)。
技术总结
本技术涉及一种履带移动的机器人,包括底盘主体,所述底盘主体的两侧外壁均安装有多个传动轮,且传动轮呈对称分布,位于同一侧的两个所述传动轮上安装有同一个履带主体,所述底盘主体的两侧外壁均开设有安装槽和滑槽,所述滑槽与安装槽相连通,所述安装槽中安装有调节组件,所述滑槽中安装有活动组件,所述活动组件上转动连接有下支撑轮。本技术,通过设置有下支撑轮,两组下支撑轮在对底盘主体及履带主体起到支撑作用的同时,在调节组件和活动组件的作用下,可以沿着滑槽的内壁滑动,进而将履带主体拉紧,拉紧后的履带主体不会过度地弯曲,进而大大减小了履带主体使用过程中产生的磨损。
技术研发人员:胡晓,吴思文,卞腾飞
受保护的技术使用者:苏州快活猿科技有限公司
技术研发日:20230905
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!