轻量化转向结构及移动储能机器人的制作方法
本发明涉及移动储能机器人,尤其涉及一种轻量化转向结构及移动储能机器人。
背景技术:
1、移动储能机器人是一种集储能、移动、充电等多功能与一体的可移动的储能式充电装置,能够高效、快捷、方便地为新能源汽车进行充电,能够将现有的“车找桩”的充电方式变成“电找车”,大大缓解新能源车主的充电焦虑。
2、但是,由于移动储能机器人的零部件数量较多、重量较大,严重影响了移动储能机器人本身的自重、运动性能和续航,限制了移动储能机器人能够移动充电的范围,既导致了能源利用率低,也减少了单个移动储能机器人所能服务的车辆数量,导致移动储能机器人的使用价值不高。
3、基于以上所述,亟需一种轻量化转向结构及移动储能机器人,能够解决上述的技术问题。
技术实现思路
1、本发明的一个目的在于提供一种轻量化转向结构,能够在满足移动储能机器人转向需求的基础上,进一步减轻移动储能机器人的重量。
2、为达此目的,本发明采用以下技术方案:
3、轻量化转向结构,设置于移动储能机器人,包括:
4、转动安装件,上述转动安装件固定安装于上述移动储能机器人的载具支架;
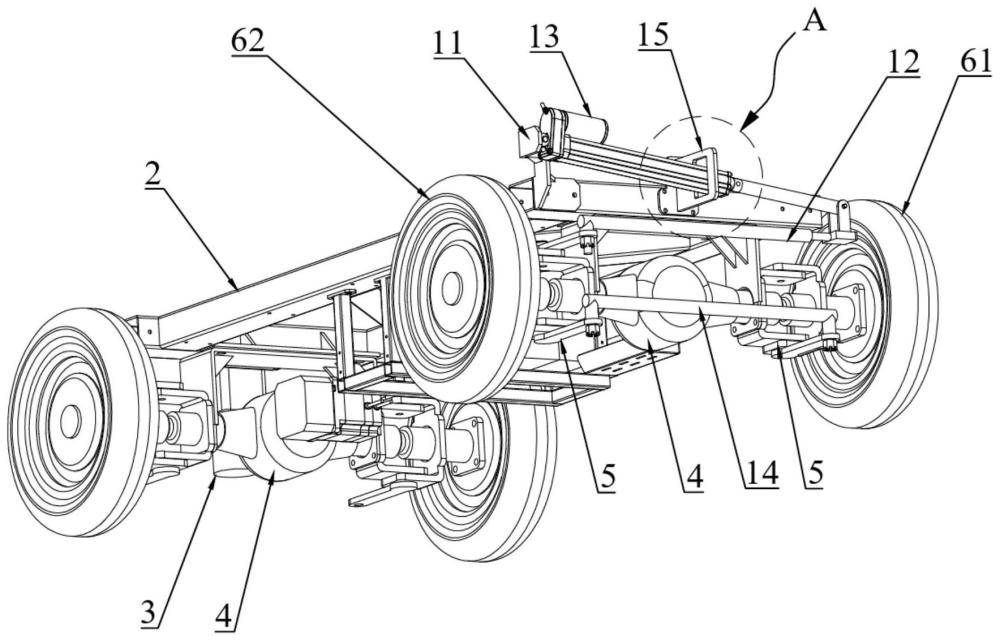
5、第一连杆,上述第一连杆的一端传动连接于上述移动储能机器人的球头活动结构,上述第一连杆能够通过上述球头活动结构驱使上述移动储能机器人的车轮进行转向;电动推杆,上述电动推杆的一端转动连接于上述转动安装件,上述电动推杆的另一端转动连接于上述第一连杆的另一端,上述电动推杆用于驱动上述第一连杆运动,以实现上述车轮的转向。
6、可选地,上述电动推杆的一端通过第一转轴铰接连接于上述转动安装件,上述电动推杆的另一端通过第二转轴铰接连接于上述第一连杆,且上述第一转轴和上述第二转轴的轴向方向均与上述载具支架的水平方向平行设置。
7、可选地,轻量化转向结构还包括转向限位件,上述转向限位件安装于上述载具支架,上述转向限位件用于限制上述车轮的转向角度。
8、可选地,上述转向限位件具有限制孔,上述电动推杆穿设于上述限制孔,上述限制孔被配置为,当上述电动推杆处于第一行程时,上述电动推杆能够抵接于上述限制孔的上边缘,上述车轮处于最大左转角度,且当上述电动推杆处于第二行程时,上述电动推杆能够抵接于上述限制孔的下边缘,上述车轮处于最大右转角度。
9、可选地,上述轻量化转向结构还包括第二连杆,上述车轮包括左轮和右轮,上述左轮和上述右轮之间通过上述第二连杆传动连接,以使上述左轮和上述右轮能够同步转向。
10、可选地,上述移动储能机器人还包括连接轴结构,上述连接轴结构的两端分别传动连接有上述左轮和上述右轮,且上述左轮和上述右轮与上述载具支架之间各连接有一个球头转向结构;上述第二连杆的一端连接于一个上述球头转向结构,上述第二连杆的另一端连接于另一上述球头转向结构,以使上述左轮和上述右轮能够同步转向。
11、可选地,上述第一连杆包括套筒和伸缩件,上述伸缩件插设于上述套筒且与上述套筒之间距离可调地固定设置,上述套筒连接于一个上述球头转向结构,上述伸缩件连接于另一上述球头转向结构。
12、可选地,上述电动推杆的行程为250mm,且重量不大于1kg。
13、本发明所提供的轻量化转向结构的有益效果在于:相比于现有的通过直线齿轮电机为移动储能机器人的转向提供动力,采用电动推杆能够大大地减少提供转动动力所需的零部件的数量和结构的重量,且易于在现有的载具支架的基础上通过简单的结构改造实现转向,能够降低移动储能机器人的制作成本。
14、本发明的另一个目的在于提供一种移动储能机器人,具有较长的续航能力和较广的运动范围,能够为较多的车辆提供充电服务。
15、为达此目的,本发明采用以下技术方案:
16、移动储能机器人,包括上述的轻量化转向结构。
17、可选地,上述移动储能机器人包括前轮组和后轮组,在上述前轮组和上述后轮组中,至少上述前轮组传动连接有上述轻量化转向结构。
18、本发明所提供的移动储能机器人的有益效果在于:相比于现有的通过直线齿轮电机为移动储能机器人的转向提供动力,采用轻量化转向结构能够大大地减少提供转动动力所需的零部件的数量和结构的重量,且易于在现有的载具支架的基础上通过简单的结构改造实现转向,能够降低移动储能机器人的制作成本。
技术特征:
1.轻量化转向结构,设置于移动储能机器人,其特征在于,包括:
2.根据权利要求1所述的轻量化转向结构,其特征在于,
3.根据权利要求2所述的轻量化转向结构,其特征在于,还包括:
4.根据权利要求3所述的轻量化转向结构,其特征在于,
5.根据权利要求4所述的轻量化转向结构,其特征在于,
6.根据权利要求5所述的轻量化转向结构,其特征在于,
7.根据权利要求6所述的轻量化转向结构,其特征在于,
8.根据权利要求1-7中任一项所述的轻量化转向结构,其特征在于,
9.移动储能机器人,其特征在于,包括如权利要求1-8中任一项所述的轻量化转向结构。
10.根据权利要求9所述的移动储能机器人,其特征在于,所述移动储能机器人包括前轮组和后轮组,在所述前轮组和所述后轮组中,至少所述前轮组传动连接有所述轻量化转向结构。
技术总结
本发明公开了一种轻量化转向结构及移动储能机器人。该轻量化转向结构包括转动安装件、第一连杆和电动推杆,转动安装件固定安装于载具支架,第一连杆的一端传动连接于球头活动结构,第一连杆能够通过球头活动结构驱使移动储能机器人的车轮进行转向,电动推杆的一端转动连接于转动安装件,电动推杆的另一端转动连接于第一连杆的另一端,电动推杆用于驱动第一连杆运动,以实现车轮的转向。相比于现有的通过直线齿轮电机为移动储能机器人的转向提供动力,采用电动推杆能够大大地减少提供转动动力所需的零部件的数量和结构的重量,且易于在现有的载具支架的基础上通过简单的结构改造实现转向,能够降低移动储能机器人的制作成本。
技术研发人员:严鹏,陈振宇,王峥,王晓航,尹坤州
受保护的技术使用者:国网江苏电动汽车服务有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!