车辆后轮转向角控制方法、装置、电子设备和存储介质与流程
本技术涉及车辆后轮转向角控制,具体涉及一种车辆后轮转向角控制方法、装置、电子设备和存储介质。
背景技术:
1、后轮的转动方向和角度对车辆操纵稳定性有着显著的影响,因此后轮转角的控制方案就显得尤为重要。
2、目前,具备后轮转向功能的车辆,一般采取后轮随动转动方案,即后轮转向系统根据前轮转角和车速信息确定后轮转角并推动后轮转动,整个过程驾驶员无法干预。具体的,采用标定后轮转角的方式,即采集车辆的方向盘转角和车速信息,以主观驾评感受为评价标准,确定不同方向盘转角和车速段对应的后轮目标转角,并通过map图的方式写入控制器,从而根据车辆实时的前轮转角和车速信息通过查找map图确定对应的后轮转角,从而实现对后轮转角的控制。该实现方案受到驾评人员主观感受的影响,评价标准不易量化,一致性难以保证;其次,不同车型转向响应不同,标定结果无法复制,造成重复标定工作;再次,该实现方式无法读取车辆的实际响应,当遇到特殊工况时(如湿滑路面等)不能针对性处理,鲁棒性较差。
3、有鉴于此,特提出本发明。
技术实现思路
1、以下给出一个或多个方面的简要概述以提供对这些方面的基本理解。此概述不是所有构想到的方面的详尽综览,并且既非旨在指认出所有方面的关键性或决定性要素亦非试图界定任何或所有方面的范围。其唯一的目的是要以简化形式给出一个或多个方面的一些概念以为稍后给出的更加详细的描述之序。
2、本技术提供一种车辆后轮转向角控制方法,解决了重复标定、一致性难以保证以及鲁棒性差的问题,提高了车辆后轮转向角的确定合理性,提高了车辆操纵稳定性,进而有助于提升驾乘体验。
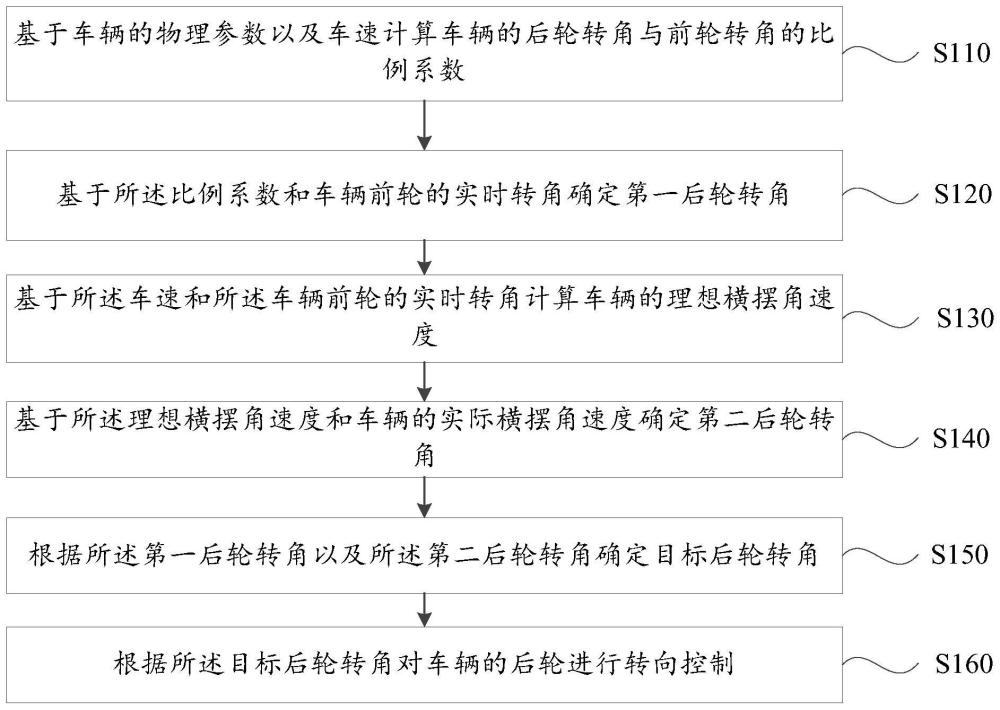
3、第一方面,本发明提供了一种车辆后轮转向角控制方法,包括以下步骤:基于车辆的物理参数以及车速计算车辆的后轮转角与前轮转角的比例系数;基于所述比例系数和车辆前轮的实时转角确定第一后轮转角;基于所述车速和所述车辆前轮的实时转角计算车辆的理想横摆角速度;基于所述理想横摆角速度和车辆的实际横摆角速度确定第二后轮转角;根据所述第一后轮转角以及所述第二后轮转角确定目标后轮转角;根据所述目标后轮转角对车辆的后轮进行转向控制。
4、进一步的,所述车辆的物理参数包括车辆前轴的侧偏刚度、车辆后轴的侧偏刚度、车辆前轴到车辆质心的距离、车辆后轴到车辆质心的距离、车辆轴距、整车质量、车辆前轮转角的最大值和车辆后轮转角的最大值;
5、所述基于车辆的物理参数以及车速计算车辆的后轮转角与前轮转角的比例系数,包括:
6、将车辆前轴的侧偏刚度、车辆后轴的侧偏刚度、车辆前轴到车辆质心的距离、车辆后轴到车辆质心的距离、车辆轴距、整车质量以及车速代入第一计算式,获得参考系数,所述第一计算式是设定横摆角加速度为0以及质心侧偏角为0,通过车辆二自由度动力学微分方程确定的;
7、根据车辆前轴到车辆质心的距离、车辆后轴到车辆质心的距离、车辆前轮转角的最大值和车辆后轮转角的最大值对所述参考系数进行缩放处理,获得所述比例系数。
8、进一步的,所述第一计算式为:
9、
10、其中,k表示所述参考系数,a为车辆前轴到车辆质心的距离,b为车辆后轴到车辆质心的距离,m为整车质量,k1为车辆前轴的侧偏刚度,k2为车辆后轴的侧偏刚度,l为车辆轴距,u为车速在预设坐标系中沿x轴的分量,预设坐标系的原点是车辆的质心,y轴正方向为车辆行进的方向,x轴正方向为驾驶员左侧。
11、进一步的,所述对所述参考系数进行缩放处理,获得所述比例系数,包括:
12、通过如下第二计算式对所述参考系数进行缩放处理:
13、
14、其中,k’表示所述比例系数,k表示所述参考系数,max(δ2)表示车辆后轮转角的最大值,max(δ1)表示车辆前轮转角的最大值,a为车辆前轴到车辆质心的距离,b为车辆后轴到车辆质心的距离。
15、进一步的,所述基于所述车速和所述车辆前轮的实时转角计算车辆的理想横摆角速度,包括:
16、通过如下第三计算式确定所述理想横摆角速度,所述第三计算式是设定加速度为0以及横摆角加速度为0,通过车辆二自由度动力学微分方程确定的;
17、所述第三计算式为:
18、ωr*=min(ω1,ω2)·sign(δ1)
19、
20、其中,ωr*表示所述理想横摆角速度,δ1为车辆前轮的实时转角,sign()为符号函数,k表示稳定性因数,μ为道路的附着系数,v表示车速,l为车辆轴距,u为车速在预设坐标系中沿x轴的分量,预设坐标系的原点是车辆的质心,y轴正方向为车辆行进的方向,x轴正方向为驾驶员左侧,g为重力系数。
21、进一步的,所述基于所述车速和所述车辆前轮的实时转角计算车辆的理想横摆角速度之后,还包括:
22、对所述理想横摆角速度进行低通滤波处理,获得滤波后的理想横摆角速度。
23、进一步的,所述根据所述第一后轮转角以及所述第二后轮转角确定目标后轮转角,包括:
24、确定所述第一后轮转角与第一权重的第一乘积;
25、确定所述第二后轮转角与第二权重的第二乘积;
26、将所述第一乘积和所述第二乘积之和确定为所述目标后轮转角;
27、其中,所述第一权重与所述第二权重之和为1。
28、进一步的,车速越大,所述第一权重越小;
29、车辆的前轮转角越大,所述第一权重越大;
30、路面附着系数越大,所述第一权重越小。
31、进一步的,所述根据所述目标后轮转角对车辆的后轮进行转向控制,包括:
32、将所述目标后轮转角与预设最小转角进行比较;
33、若所述目标后轮转角大于所述预设最小转角,按照所述目标后轮转角对车辆的后轮进行转向控制。
34、第二方面,本发明还提供了一种车辆后轮转向角控制装置,包括:
35、第一计算模块,用于基于车辆的物理参数以及车速计算车辆的后轮转角与前轮转角的比例系数;
36、第一确定模块,用于基于所述比例系数和车辆前轮的实时转角确定第一后轮转角;
37、第二计算模块,用于基于所述车速和所述车辆前轮的实时转角计算车辆的理想横摆角速度;
38、第二确定模块,用于基于所述理想横摆角速度和车辆的实际横摆角速度确定第二后轮转角;
39、第三确定模块,用于根据所述第一后轮转角以及所述第二后轮转角确定目标后轮转角;
40、控制模块,用于根据所述目标后轮转角对车辆的后轮进行转向控制。
41、第三方面,本发明还提供一种电子设备,所述电子设备包括:
42、一个或多个处理器;
43、存储装置,用于存储一个或多个程序;
44、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上所述的车辆后轮转向角控制方法。
45、第四方面,本发明还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上所述的车辆后轮转向角控制方法。
46、本发明公开的车辆后轮转向角控制方法,通过基于车辆的物理参数以及车速计算车辆的后轮转角与前轮转角的比例系数;基于所述比例系数和车辆前轮的实时转角确定第一后轮转角;基于所述车速和所述车辆前轮的实时转角计算车辆的理想横摆角速度;基于所述理想横摆角速度和车辆的实际横摆角速度确定第二后轮转角;根据所述第一后轮转角以及所述第二后轮转角确定目标后轮转角;根据所述目标后轮转角对车辆的后轮进行转向控制的技术手段,解决的针对不同车型重复标定、一致性难以保证以及鲁棒性差的问题,提高了车辆后轮转向角的确定合理性,提高了车辆操纵稳定性,进而有助于提升驾乘体验。
- 还没有人留言评论。精彩留言会获得点赞!