基于无人艇的水下探测装置回收系统及方法与流程
[0001]
本发明涉及无人艇技术领域,具体是指一种基于无人艇的水下探测装置回收系统及方法。
背景技术:
[0002]
随着技术的快速发展,无人艇得到了越来越广泛的应用。各种各样的无人艇在海上工作时起到了突出的作用,例如,无人艇可以根据需要执行水下物品寻找、水质探测、海洋环境监测等各种任务。无人艇上一般搭载有雷达、惯导、声呐、gps、超声、摄像头等传感设备,可以实现环境感知、导航避障、路径规划、抗涌流扰动控制等功能。
[0003]
进行海洋观测,可获取关于海洋的各种自然现象的数据,有助于理解其科学原理和变化规律。为了更好地实现海洋观测,出现了一些水下探测装置,在水下对海洋中各项数据进行探测,并且所述水下探测装置可以沿着一定的路线前行,在一定工作范围内流动探测,很大程度上方便了海上工作人员的探测工作。然而,现有技术中的水下探测装置尚没有很好的回收方法,水下探测装置在出现故障或因其他原因需要及时回收时,无法快速有效地进行回收。
技术实现要素:
[0004]
为了解决现有技术中的问题,本发明提供了一种基于无人艇的水下探测装置回收系统及方法,基于无人艇可以快速方便地实现水下探测装置的回收。
[0005]
为了实现上述目的,本发明具有如下构成:
[0006]
本发明提供了一种基于无人艇的水下探测装置回收方法,所述无人艇的底部设置有伸缩杆,所述伸缩杆可沿垂直方向发生长度变化,所述伸缩杆的底部设置有回收舱,所述回收舱的内侧壁设置有碰撞传感器,所述伸缩杆处于初始长度时,所述伸缩杆的长度最短;
[0007]
所述方法包括如下步骤:
[0008]
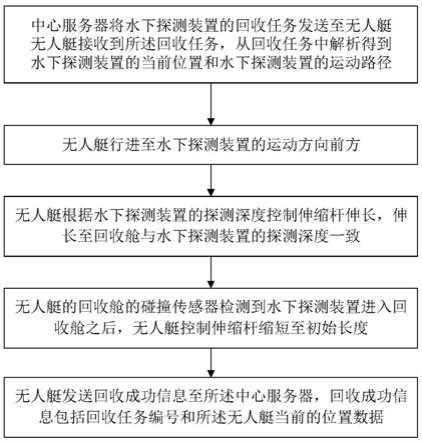
中心服务器将水下探测装置的回收任务发送至无人艇,所述回收任务包括回收任务编号、所述水下探测装置的体积、所述水下探测装置的探测深度、所述水下探测装置的运动路径和所述水下探测装置的当前位置;
[0009]
所述无人艇接收到所述回收任务,从所述回收任务中解析得到所述水下探测装置的当前位置和所述水下探测装置的运动路径;
[0010]
所述无人艇行进至所述水下探测装置的运动方向前方;
[0011]
所述无人艇从所述回收任务中解析得到所述水下探测装置的探测深度;
[0012]
所述无人艇根据所述水下探测装置的探测深度控制所述伸缩杆向下伸长,伸长至所述回收舱与所述水下探测装置的探测深度一致;
[0013]
所述无人艇的回收舱的碰撞传感器检测到所述水下探测装置进入所述回收舱之后,所述无人艇控制所述伸缩杆缩短至初始长度;
[0014]
所述无人艇发送回收成功信息至所述中心服务器,所述回收成功信息包括所述回
收任务编号和所述无人艇当前的位置数据。
[0015]
在一些优选的实施例中,所述中心服务器将水下探测装置的回收任务发送至无人艇,包括如下步骤:
[0016]
所述中心服务器获取所述水下探测装置的体积,查找具有的回收舱的体积大于所述水下探测装置的体积的无人艇,将所述水下探测装置的回收任务发送至查找到的无人艇。
[0017]
在一些优选的实施例中,所述无人艇接收到所述回收任务之后,还包括如下步骤:
[0018]
所述无人艇判断自身的回收舱中是否已存在其他水下探测装置;
[0019]
如果所述无人艇的回收舱中未存在其他水下探测装置,则所述无人艇判断自身的回收舱的体积是否大于所述回收任务中的水下探测装置的体积,如果是,则所述无人艇接受所述回收任务,否则,所述无人艇拒绝所述回收任务。
[0020]
在一些优选的实施例中,所述无人艇判断自身的回收舱中是否已存在其他水下探测装置之后,还包括如下步骤:
[0021]
如果所述无人艇的回收舱中已存在其他水下探测装置,则所述无人艇计算所述回收舱中的剩余体积;
[0022]
如果所述回收舱中的剩余体积大于等于所述回收任务中的水下探测装置的体积乘以k,k为预设的大于1的冗余系数,则所述无人艇接受所述回收任务;
[0023]
如果所述回收舱中的剩余体积小于所述回收任务中的水下探测装置的体积乘以k,则所述无人艇拒绝所述回收任务。
[0024]
在一些优选的实施例中,所述无人艇行进至所述水下探测装置的运动方向前方,包括如下步骤:
[0025]
所述无人艇行进至所述水下探测装置的运动方向前方,且所述无人艇与所述水下探测装置的距离大于l,其中l=t1*v1,t1表示所述无人艇的伸缩杆从所述初始长度伸长至所述回收舱与所述水下探测装置的探测深度一致所需的时间,v1表示所述水下探测装置的最大运动速度。
[0026]
在一些优选的实施例中,所述回收舱的后侧设置有开口,所述开口处设置有舱门,所述无人艇根据所述水下探测装置的探测深度控制所述伸缩杆向下伸长,伸长至所述回收舱与所述水下探测装置的探测深度一致之后,所述无人艇控制所述舱门打开,所述水下探测装置可从所述回收舱的开口处进入所述回收舱的内部;
[0027]
所述无人艇的回收舱的碰撞传感器检测到所述水下探测装置进入所述回收舱之后,所述无人艇控制所述舱门关闭,然后所述无人艇控制所述伸缩杆缩短至初始长度。
[0028]
在一些优选的实施例中,所述方法还包括如下步骤:
[0029]
所述中心服务器接收到所述回收成功信息之后,所述中心服务器将停止运动信息至所述水下探测装置,所述水下探测装置配置为接收到所述停止运动信息之后,停止运动。
[0030]
本发明实施例还提供一种基于无人艇的水下探测装置回收系统,应用于所述的基于无人艇的水下探测装置回收方法,所述系统包括中心服务器和至少一个无人艇,所述中心服务器用于将水下探测装置的回收任务发送至无人艇,所述回收任务包括回收任务编号、所述水下探测装置的体积、所述水下探测装置的探测深度、所述水下探测装置的运动路径和所述水下探测装置的当前位置;所述无人艇的底部设置有伸缩杆,所述伸缩杆可沿垂
直方向发生长度变化,所述伸缩杆的底部设置有回收舱,所述回收舱的内侧壁设置有碰撞传感器,所述伸缩杆处于初始长度时,所述伸缩杆的长度最短;
[0031]
所述无人艇接收到所述回收任务,执行如下步骤:
[0032]
所述无人艇从所述回收任务中解析得到所述水下探测装置的当前位置和所述水下探测装置的运动路径;
[0033]
所述无人艇行进至所述水下探测装置的运动方向前方;
[0034]
所述无人艇从所述回收任务中解析得到所述水下探测装置的探测深度;
[0035]
所述无人艇根据所述水下探测装置的探测深度控制所述伸缩杆向下伸长,伸长至所述回收舱与所述水下探测装置的探测深度一致;
[0036]
所述无人艇的回收舱的碰撞传感器检测到所述水下探测装置进入所述回收舱之后,所述无人艇控制所述伸缩杆缩短至初始长度;
[0037]
所述无人艇发送回收成功信息至所述中心服务器,所述回收成功信息包括所述回收任务编号和所述无人艇当前的位置数据。
[0038]
在一些优选的实施例中,所述中心服务器将水下探测装置的回收任务发送至无人艇时,获取所述水下探测装置的体积,查找具有的回收舱的体积大于所述水下探测装置的体积的无人艇,将所述水下探测装置的回收任务发送至查找到的无人艇;
[0039]
所述无人机接收到所述回收任务之后,还配置为执行如下步骤:
[0040]
所述无人艇判断自身的回收舱中是否已存在其他水下探测装置;
[0041]
如果所述无人艇的回收舱中未存在其他水下探测装置,则所述无人艇判断自身的回收舱的体积是否大于所述回收任务中的水下探测装置的体积,如果是,则所述无人艇接受所述回收任务,否则,所述无人艇拒绝所述回收任务;
[0042]
如果所述无人艇的回收舱中已存在其他水下探测装置,则所述无人艇计算所述回收舱中的剩余体积;
[0043]
如果所述回收舱中的剩余体积大于等于所述回收任务中的水下探测装置的体积乘以k,k为预设的大于1的冗余系数,则所述无人艇接受所述回收任务;
[0044]
如果所述回收舱中的剩余体积小于所述回收任务中的水下探测装置的体积乘以k,则所述无人艇拒绝所述回收任务。
[0045]
综上所述,与现有技术相比,本发明基于无人艇可以快速方便地实现水下探测装置的回收,在回收过程中,无人艇和水下探测装置均无需停止运动,进一步方便了海上工作人员的海上探测和探测器回收工作,无人艇的回收舱可以自动检测是否成功会收到水下探测装置,并且在回收成功之后可以及时通过中心服务器,通过中心服务器统一派发回收任务,无人艇快速执行,并且无人艇的回收舱可以通过伸缩杆调整回收深度,从而可以满足各种场景下、各种探测深度下、各种运行路径和运行速度下的水下探测装置的回收,适用于大规模推广应用。
附图说明
[0046]
图1为本发明一实施例的基于无人艇的水下探测装置回收方法的流程图;
[0047]
图2为本发明一实施例的无人艇回收探测装置的示意图。
具体实施方式
[0048]
现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的实施方式;相反,提供这些实施方式使得本发明将全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。在图中相同的附图标记表示相同或类似的结构,因而将省略对它们的重复描述。
[0049]
所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施方式中。在下面的描述中,提供许多具体细节从而给出对本发明的实施方式的充分理解。然而,本领域技术人员应意识到,没有特定细节中的一个或更多,或者采用其它的方法、组元、材料等,也可以实践本发明的技术方案。在某些情况下,不详细示出或描述公知结构、材料或者操作以避免模糊本发明。
[0050]
如图1所示,为了解决现有技术中的技术问题,本发明提供了一种基于无人艇的水下探测装置回收方法,基于无人艇和中心服务器将正在运行中的水下探测装置进行回收,水下探测装置按照既定的路线在水下一定深度运行,中心服务器负责向无人艇派发水下探测装置回收任务,无人艇负责执行所述水下探测装置的回收任务。基于此,所述无人艇的底部设置有伸缩杆,所述伸缩杆可沿垂直方向发生长度变化,所述伸缩杆的底部设置有回收舱,所述回收舱的内侧壁设置有碰撞传感器,所述伸缩杆处于初始长度时,所述伸缩杆的长度最短;
[0051]
所述基于无人艇的水下探测装置回收方法包括如下步骤:
[0052]
中心服务器将水下探测装置的回收任务发送至无人艇,所述回收任务包括回收任务编号、所述水下探测装置的体积、所述水下探测装置的探测深度、所述水下探测装置的运动路径和所述水下探测装置的当前位置;
[0053]
所述无人艇接收到所述回收任务,从所述回收任务中解析得到所述水下探测装置的当前位置和所述水下探测装置的运动路径;
[0054]
所述无人艇行进至所述水下探测装置的运动方向前方;
[0055]
所述无人艇从所述回收任务中解析得到所述水下探测装置的探测深度;
[0056]
所述无人艇根据所述水下探测装置的探测深度控制所述伸缩杆向下伸长,伸长至所述回收舱与所述水下探测装置的探测深度一致,可以保证水下探测装置进入到所述回收舱中,所述伸缩杆可以包括第一杆和第二杆,第一杆和第二杆可以相对滑动,第一杆和第二杆之间设置有滑轨和滑轮,滑轮可以由伺服电机进行驱动转动,从而调整第一杆和第二杆的相对位置,使得伸缩杆的长度伸长或缩短;
[0057]
所述无人艇的回收舱的碰撞传感器检测到所述水下探测装置进入所述回收舱之后,所述无人艇控制所述伸缩杆缩短至初始长度,即收回伸缩杆,因此,本发明通过所述碰撞传感器可以自动检测所述水下探测装置是否进入到所述回收舱中,即是否回收水下探测装置成功;
[0058]
所述无人艇发送回收成功信息至所述中心服务器,所述回收成功信息包括所述回收任务编号和所述无人艇当前的位置数据,基于此,所述无人艇还可以设置有无线通信模块和定位模块,所述定位模块可以为gps定位模块,所述无线通信模块可以为gprs通信模块、cdma通信模块或4g通信模块,可以实现远距离与中心服务器通信。
[0059]
在该实施例中,可以设置不同大小的水下探测装置,不同无人艇的回收舱的大小
也可以不一样。为了保证回收任务能够正常完成,所述中心服务器将水下探测装置的回收任务发送至无人艇,包括如下步骤:
[0060]
所述中心服务器获取所述水下探测装置的体积,查找具有的回收舱的体积大于所述水下探测装置的体积的无人艇,将所述水下探测装置的回收任务发送至查找到的无人艇。
[0061]
进一步地,如果查找到多个可以容纳所述水下探测装置的无人艇,则可以选择其回收舱的体积与水下探测装置的体积最接近的无人艇,避免空间浪费,也可以选择距离该水下探测装置最近的无人艇,保证回收任务快速执行。
[0062]
在该实施例中,所述无人艇接收到所述回收任务之后,还包括如下步骤:
[0063]
所述无人艇判断自身的回收舱中是否已存在其他水下探测装置;
[0064]
如果所述无人艇的回收舱中未存在其他水下探测装置,则所述无人艇判断自身的回收舱的体积是否大于所述回收任务中的水下探测装置的体积,如果是,则所述无人艇接受所述回收任务,否则,由于所述无人艇的空间不足,无法容纳所述水下探测装置,因此所述无人艇拒绝所述回收任务。
[0065]
在该实施例中,所述无人艇判断自身的回收舱中是否已存在其他水下探测装置之后,还包括如下步骤:
[0066]
如果所述无人艇的回收舱中已存在其他水下探测装置,则所述无人艇计算所述回收舱中的剩余体积;
[0067]
如果所述回收舱中的剩余体积大于等于所述回收任务中的水下探测装置的体积乘以k,k为预设的大于1的冗余系数,则所述无人艇接受所述回收任务;此处k的值可以根据需要选择和设定,考虑到两个或多个水下探测装置在回收舱中的放置是存在一定间隙的,因此需要有一定的冗余空间考虑;
[0068]
如果所述回收舱中的剩余体积小于所述回收任务中的水下探测装置的体积乘以k,则所述无人艇无法同时容纳已有的水下探测装置和新的水下探测装置,则拒绝所述回收任务。
[0069]
在该实施例中,所述无人艇行进至所述水下探测装置的运动方向前方,包括如下步骤:
[0070]
所述无人艇行进至所述水下探测装置的运动方向前方,且所述无人艇与所述水下探测装置的距离大于l,其中l=t1*v1,t1表示所述无人艇的伸缩杆从所述初始长度伸长至所述回收舱与所述水下探测装置的探测深度一致所需的时间,v1表示所述水下探测装置的最大运动速度,由此,可以保证所述无人艇的伸缩杆在从所述初始长度伸长至所述回收舱与所述水下探测装置的探测深度一致的过程中,水下探测装置仍然在所述无人艇的后面,并且在此过程中,所述无人艇可以保持与所述水下探测装置基本一致的前进速度和前进方向,从而可以在回收舱放下来之后,还有一定的冗余时间等待水下探测装置进入到无人艇的回收舱中,避免水下探测装置和回收舱发生意外的碰撞,并且避免水下探测装置在此过程中与无人艇错过而无法进入到回收舱中。此处最大运动速度可以是所述无人艇的控制器中预先存储的所述水下探测装置的最大运动速度的一个定值,此处选择所述水下探测装置的最大运动速度来进行距离l的计算,可以进一步增加所述无人艇的回收舱放下后等待所述水下探测装置进入的冗余时间,避免所述水下探测装置突然加速而与回收舱发生意外的
碰撞,并且避免水下探测装置在此过程中与无人艇错过而无法进入到回收舱中。
[0071]
在该实施例中,所述回收舱的后侧设置有开口,所述开口处设置有舱门,所述无人艇根据所述水下探测装置的探测深度控制所述伸缩杆向下伸长,伸长至所述回收舱与所述水下探测装置的探测深度一致之后,所述无人艇控制所述舱门打开,所述水下探测装置可从所述回收舱的开口处进入所述回收舱的内部。
[0072]
所述无人艇的回收舱的碰撞传感器检测到所述水下探测装置进入所述回收舱之后,所述无人艇控制所述舱门关闭,然后所述无人艇控制所述伸缩杆缩短至初始长度。通过所述舱门的控制,可以保持水下探测装置进入到回收舱后的位置稳定性,避免水下探测装置进入到回收舱后再意外掉出。
[0073]
在该实施例中,所述基于无人艇的水下探测装置回收方法还包括如下步骤:
[0074]
所述中心服务器接收到所述回收成功信息之后,所述中心服务器将停止运动信息至所述水下探测装置,所述水下探测装置配置为接收到所述停止运动信息之后,停止运动,避免再与所述回收舱的内壁发生碰撞而导致所述回收舱或所述水下探测装置发生故障。
[0075]
本发明实施例还提供一种基于无人艇的水下探测装置回收系统,应用于所述的基于无人艇的水下探测装置回收方法,所述系统包括中心服务器和至少一个无人艇,所述中心服务器用于将水下探测装置的回收任务发送至无人艇,所述回收任务包括回收任务编号、所述水下探测装置的体积、所述水下探测装置的探测深度、所述水下探测装置的运动路径和所述水下探测装置的当前位置。
[0076]
如图2所示,为该实施例中无人艇的结构示意图。所述无人艇t100的底部设置有伸缩杆t200,所述伸缩杆t200可沿垂直方向发生长度变化,所述伸缩杆t200的底部设置有回收舱t300,所述回收舱t300的内侧壁设置有碰撞传感器,所述伸缩杆t200处于初始长度时,所述伸缩杆t200的长度最短。在所述无人艇t100运行至所述水下探测装置t400的前方,且所述伸缩杆t200伸长至所述回收舱t300与所述水下探测装置t400的深度一致时,需要回收的水下探测装置t400可以从回收舱t300后侧的开口进入到回收舱t300中。
[0077]
具体地,在该基于无人艇的水下探测装置回收系统中,所述无人艇接收到所述回收任务之后,执行如下步骤:
[0078]
所述无人艇从所述回收任务中解析得到所述水下探测装置的当前位置和所述水下探测装置的运动路径;
[0079]
所述无人艇行进至所述水下探测装置的运动方向前方;
[0080]
所述无人艇从所述回收任务中解析得到所述水下探测装置的探测深度;
[0081]
所述无人艇根据所述水下探测装置的探测深度控制所述伸缩杆向下伸长,伸长至所述回收舱与所述水下探测装置的探测深度一致;
[0082]
所述无人艇的回收舱的碰撞传感器检测到所述水下探测装置进入所述回收舱之后,所述无人艇控制所述伸缩杆缩短至初始长度;
[0083]
所述无人艇发送回收成功信息至所述中心服务器,所述回收成功信息包括所述回收任务编号和所述无人艇当前的位置数据。
[0084]
在该实施例中,所述中心服务器将水下探测装置的回收任务发送至无人艇时,获取所述水下探测装置的体积,查找具有的回收舱的体积大于所述水下探测装置的体积的无人艇,将所述水下探测装置的回收任务发送至查找到的无人艇;
[0085]
所述无人机接收到所述回收任务之后,还配置为执行如下步骤:
[0086]
所述无人艇判断自身的回收舱中是否已存在其他水下探测装置;
[0087]
如果所述无人艇的回收舱中未存在其他水下探测装置,则所述无人艇判断自身的回收舱的体积是否大于所述回收任务中的水下探测装置的体积,如果是,则所述无人艇接受所述回收任务,否则,所述无人艇拒绝所述回收任务;
[0088]
如果所述无人艇的回收舱中已存在其他水下探测装置,则所述无人艇计算所述回收舱中的剩余体积;
[0089]
如果所述回收舱中的剩余体积大于等于所述回收任务中的水下探测装置的体积乘以k,k为预设的大于1的冗余系数,则所述无人艇接受所述回收任务;
[0090]
如果所述回收舱中的剩余体积小于所述回收任务中的水下探测装置的体积乘以k,则所述无人艇拒绝所述回收任务。
[0091]
本发明的基于无人艇的水下探测装置回收系统中,各个模块的功能实现方式可以采用所述基于无人艇的水下探测装置回收方法中各个步骤的具体实施方式,此处不予赘述。
[0092]
综上所述,与现有技术相比,本发明基于无人艇可以快速方便地实现水下探测装置的回收,在回收过程中,无人艇和水下探测装置均无需停止运动,进一步方便了海上工作人员的海上探测和探测器回收工作,无人艇的回收舱可以自动检测是否成功会收到水下探测装置,并且在回收成功之后可以及时通过中心服务器,通过中心服务器统一派发回收任务,无人艇快速执行,并且无人艇的回收舱可以通过伸缩杆调整回收深度,从而可以满足各种场景下、各种探测深度下、各种运行路径和运行速度下的水下探测装置的回收,适用于大规模推广应用。
[0093]
在此说明书中,本发明已参照其特定的实施例作了描述。但是,很显然仍可以作出各种修改和变换而不背离本发明的精神和范围。因此,说明书和附图应被认为是说明性的而非限制性的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1