一种水下无人航行器的捕获装置
1.本发明涉及水下设备技术领域,具体涉及一种水下无人航行器的捕获装置。
背景技术:
2.伴随着世界各国积极开展海洋探索,水下无人航行器因其结构相对小巧紧凑,行动隐蔽性强,日益成为各国海洋探索的宠儿。水下无人航行器任务完成后需要回收,常见的回收方式分为水面母船回收和水下对接回收。水下对接回收方式因不受水域影响且隐蔽性强的特点,成为各国研究重点。但在回收水下无人航行器的过程中,大概率出现航行器轴线在水平方向上偏离回收平台轴线的情况,此时,就需要回收装置执行相应动作才能将轴线偏离的航行器捕获,并安全、快速地移动至母船或目的平台。因此,使用何种捕获机构才能高效、可靠地捕获轴线偏离的航行器尤为关键。目前现有技术中,水下对接回收机构多采用串联式机构,每个关节都需要独立的传动机构,涉及到许多的机构之间相互联结与配合,导致整体结构设计往往比较复杂,控制繁琐;仅将机械爪作为捕获装置,导致可用负载低,通用性不强。例如美国schiling公司的titan4水下机械手,由六个自由度的串联式机构传动的机械臂和一个机械爪组成,通过7个独立的伺服阀来控制各个关节的运动,装置结构复杂,控制繁琐。澳大利亚blueprintlab公司研制的blueprintlab 7水下机械手,采用机械臂和机械爪串联结构,共4个自由度,但这种机械臂体积小,负载小。浙江大学设计过一种水下绳驱高冗余自由度机械臂,但这种机械臂活动范围较小,负载小,反应速度慢。
技术实现要素:
3.针对现有技术的上述不足,本发明提供了一种结构简易、控制简单的水下无人航行器的捕获装置。
4.为达到上述发明目的,本发明所采用的技术方案为:
5.提供一种水下无人航行器的捕获装置,其包括捕获平台,捕获平台上对称设置有若干多刚体机械臂;多刚体机械臂包括依次连接的若干刚体单元,多刚体机械臂通过竖直的转轴与捕获平台连接,多刚体机械臂靠近捕获平台一端的刚体单元为刚体根部单元,转轴的一端与刚体根部单元的底部固定连接,转轴的另一端连接有液压马达;液压马达和刚体根部单元分别位于捕获平台的两侧,转轴穿过捕获平台且转轴与捕获平台转动配合;捕获平台的底端设置有与回收平台连接的固定件。
6.进一步的,多刚体机械臂的刚体单元包括骨架,骨架的顶端设置有用于相邻两个刚体单元铰接的铰接孔,铰接孔处设置有第一铰接轴;骨架内设置有液压缸,液压缸远离活塞杆的一端设置有限位孔,骨架上开设有与限位孔一致的安装孔,所述限位孔处设置有限位轴,且所述限位轴与安装孔配合连接;液压缸通过限位轴与骨架连接;多刚体机械臂上设置有控制液压缸的若干液压伺服系统;
7.骨架的一侧设置有供液压缸穿过的安装口;骨架上设置有连接柱,连接柱与安装口分别设置在骨架的两侧;活塞杆通过第二铰接轴与连接柱铰接;且活塞杆与连接柱的转
动方向与相邻两个骨架的转动方向一致。
8.进一步的,多刚体机械臂的任一骨架均需满足如下公式:
[0009][0010][0011][0012]
其中,θ0为连线l1和连线l2的夹角;连线l1为第一铰接轴的轴心和第二铰接轴的轴心之间的连线;连线l2为第一铰接轴的轴心和限位轴的轴心之间的连线;δθ为相邻两个骨架的设计转动角度;δ为液压缸的活塞杆的所需伸长量;β为连线l和连线l2的夹角,连线l为第二铰接轴的轴心和限位轴的轴心之间的连线。
[0013]
进一步的,液压缸的推力设计方法为:
[0014][0015]
其中,f为多刚体机械臂的自由端部承受的等效外力;ms为等效外力f在多刚体机械臂的截面处产生的弯矩;ts为液压缸的轴向推力;ls为任意相邻两个刚体单元的铰接处到多刚体机械臂的自由端部的距离;
[0016]
等效外力f作用在多刚体机械臂的自由端部时,多刚体机械臂的根部承受最大的弯矩,则液压缸的推力t需满足t>t
max
;
[0017][0018]
其中,la为刚体根部单元与相邻的刚体单元铰接处到多刚体机械臂的自由端部的距离。
[0019]
进一步的,若干液压伺服系统分别与n个液压缸连接,n为2、3或4。将多刚体机械臂上的液压缸分组控制,能够有效减少控制端口,从而降低液压管路系统和控制方案的复杂性。
[0020]
进一步的,骨架的顶端设置有安装隔板,安装隔板上固定连接有浮力板;骨架的侧面上还开设有减重孔。减重孔的设置能够有效降低骨架的自重,从而降低多刚体机械臂的整体自重;同时设置浮力板,浮力板配合减重孔能够有效减小骨架自重对多刚体机械臂的灵活性的负面影响,使多刚体机械臂更快速、灵活卷携水下无人航行器,提高捕获概率。
[0021]
进一步的,骨架上开设有供液压缸的液压管穿过的开口;开口位于铰接孔和液压缸之间。
[0022]
进一步的,捕获平台上设置有供回收平台的航行器固定机构穿过的固定开口。
[0023]
本发明的有益效果为:
[0024]
本发明整体结构简单,通过多刚体机械臂弯曲将偏离回收平台轴线的水下无人航行器卷携至捕获平台上,多刚体机械臂卷携水下无人航行器的过程,卷携动作简单;整个动作中对多刚体机械臂上的压力主要在多刚体机械臂的刚体根部单元的液压缸,在实际使用时,液压缸的性能规格可根据所处多刚体机械臂的位置进行调节,越靠近多刚体机械臂自由端部的液压缸的性能越低,从而能够节省成本。
[0025]
在多刚体机械臂卷携水下无人航行器的过程中,将多刚体机械臂上的刚体单元以两个、三个或四个成组,从而能够使多刚体机械臂在完成弯曲卷携水下无人航行器的同时,降低液压管路系统和控制方案的复杂性。固定件的设置使得本装置具有较佳的适配性,无需更换现有的回收平台。
附图说明
[0026]
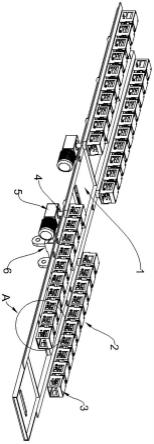
图1为本发明的立体结构示意图;
[0027]
图2为图1中a处的放大示意图;
[0028]
图3为本发明的仰视结构示意图;
[0029]
图4为骨架的正视结构示意图;
[0030]
图5为骨架的左视结构示意图;
[0031]
图6为骨架的俯视结构示意图;
[0032]
图7为相邻两个刚体单元的连接结构剖视示意图;
[0033]
图8为多刚体机械臂的第一弯曲形态示意图;
[0034]
图9为多刚体机械臂的第二弯曲形态示意图;
[0035]
图10为多刚体机械臂的第三弯曲形态示意图;
[0036]
图11为多刚体机械臂的第三弯曲形态示意图。
[0037]
其中,1、捕获平台;101、固定开口;2、多刚体机械臂;3、刚体单元;310、骨架;311、铰接孔;312、第一铰接轴;313、液压缸;314、安装孔;315、限位轴;316、安装口;317、连接柱;3171、连接柱安装孔;318、活塞杆;319、第二铰接轴;320、安装隔板;321、浮力板;322、减重孔;4、转轴;5、液压马达;6、固定件。
具体实施方式
[0038]
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
[0039]
如图1-3所示,一种水下无人航行器的捕获装置,包括捕获平台1,捕获平台1上对称设置有四个多刚体机械臂2;本发明的其他实施例中,多刚体机械臂2的数量还可以为6、8或10。每个多刚体机械臂2均包括依次连接的十个刚体单元3,本发明的其他实施例中,每个多刚体机械臂2的刚体单元3数量还可以为8、9、11或12;多刚体机械臂2通过竖直的转轴4与捕获平台1连接,多刚体机械臂2靠近捕获平台1一端的刚体单元3为刚体根部单元,转轴4的
一端与刚体根部单元的底部固定连接,转轴4的另一端通过联轴器连接有液压马达5;液压马达5和刚体根部单元分别位于捕获平台1的两侧,转轴4穿过捕获平台1且转轴4与捕获平台1转动配合;捕获平台1的底端设置有与回收平台连接的固定件6。捕获平台1上设置有供回收平台的航行器固定机构穿过的固定开口101。
[0040]
如图4-7所示,多刚体机械臂2的刚体单元3包括骨架310,骨架310的顶端设置有用于相邻两个刚体单元3铰接的铰接孔311,铰接孔311有两个,分别位于骨架310的两侧;铰接孔311处设置有第一铰接轴312;骨架310内设置有液压缸313,液压缸313远离活塞杆318的一端设置有限位孔,骨架310上开设有与限位孔一致的安装孔314,所述限位孔处设置有限位轴315,且所述限位轴315与安装孔314配合连接;液压缸313通过限位轴315与骨架310连接;多刚体机械臂2上设置有控制液压缸313的若干液压伺服系统;实际使用时,位于多刚体机械臂2自由端的刚体单元3中无需设置液压缸313;即本实施例中多刚体机械臂2上共有九个液压缸313。实际使用时,每个液压缸313进行单独控制的话会使得液压管路增加,对液压伺服系统提出更高要求,因此,若干液压伺服系统分别与n个液压缸313连接,n为2、3或4。即,将9个液压缸313分为两个一组、三个一组或四个一组,每组分别连接一个液压伺服系统,每组内的液压缸313的液压管串联,使得每组中的液压缸313能够同时作动。如此,既可以使柔性捕获臂产生较多的弯曲形态,又可以有效减少控制端口,从而降低液压管路系统和控制方案的复杂性。
[0041]
骨架310的一侧设置有供液压缸313穿过的安装口316;骨架310上设置有连接柱安装孔3171,连接柱317与连接柱安装孔3171通过螺栓固定,连接柱317与安装口316分别设置在骨架310的两侧;活塞杆318通过第二铰接轴319与连接柱317铰接;且活塞杆318与连接柱317的转动方向与相邻两个骨架310的转动方向一致。骨架310的顶端设置有安装隔板320,安装隔板320上通过螺栓固定连接有浮力板321;骨架310的侧面上还开设有减重孔322。骨架310上开设有供液压缸313的液压管穿过的开口;开口位于铰接孔311和液压缸313之间。在多刚体机械臂2运动过程中水能从减重孔322和开口顺利穿过,从而避免多刚体机械臂2运动时排开水引起乱流;乱流容易影响到水下无人航行器形态或位置。减重孔322和开口能够有效避免乱流裹挟水下无人航行器移动,从而使多刚体机械臂2顺利卷携水下无人航行器,完成捕获动作。
[0042]
多刚体机械臂2的任一骨架310均需满足如下公式:
[0043][0044][0045][0046]
其中,θ0为连线l1和连线l2的夹角;连线l1为第一铰接轴312的轴心和第二铰接轴319的轴心之间的连线;连线l2为第一铰接轴312的轴心和限位轴315的轴心之间的连线;δθ为相邻两个骨架310的设计转动角度;δ为液压缸313的活塞杆318的所需伸长量;β为连线l
和连线l2的夹角,连线l为第二铰接轴319的轴心和限位轴315的轴心之间的连线。
[0047]
本实施例中,骨架310的高度为140mm,宽度为150mm;骨架310两侧的铰接孔311的圆心之间的水平距离为200mm,骨架310底部的长度为200mm;骨架310的整体长度为234mm;骨架310上远离限位孔的铰接孔311的圆心到限位孔的圆心的水平距离为150mm。则,l=132mm,l1=170mm,l2=82mm,设定相邻两个骨架310的转动角度δθ=30
°
;由公式(1)、(2)和(3)可得δ=42.4mm,cosβ=0.887。
[0048]
液压缸的推力设计方法为:
[0049][0050]
其中,f为多刚体机械臂2的自由端部承受的等效外力;ms为等效外力f在多刚体机械臂2的截面处产生的弯矩;ts为液压缸313的轴向推力;ls为任意相邻两个刚体单元3的铰接处到多刚体机械臂2的自由端部的距离;
[0051]
等效外力f作用在多刚体机械臂2的自由端部时,多刚体机械臂2的根部承受最大的弯矩,则液压缸313的推力t需满足t>t
max
;
[0052][0053]
其中,la为刚体根部单元与相邻的刚体单元3铰接处到多刚体机械臂2的自由端部的距离。取la=2000mm(十个刚体单元连接的长度),cosβ=0.887,f=392n(水下无人航行器40kg)带入公式(6),计算可得t
max
=9985.0n。承受等效外力在多刚体机械臂的根部产生的与水下无人航行器轴线方向平行的力矩不小于m
max
=laf=784n
·
m。
[0054]
本发明的工作原理及使用流程:
[0055]
安装有本装置的回收平台移动至需要捕获的水下无人航行器处,靠近水下无人航行器一侧的水平放置的两个多刚体机械臂2在液压马达5的驱动下旋转,使多刚体机械臂2的轴线与水下无人航行器的轴线垂直;如图8-11所示,液压伺服系统运作,控制两个多刚体机械臂2上的液压缸313以两个一组、三个一组或四个一组作动,使捕获臂弯曲,从外侧接近水下无人航行器;两个多刚体机械臂2继续增加弯曲程度,将水下无人航行器卷携至捕获平台1的上方,水下无人航行器在两个多刚体机械臂2的卷携下,平行置于捕获平台1上,最后回收平台上的航行器固定机构将水下无人航行器锁紧固定,多刚体机械臂2伸直、旋转,返回原位。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1