一种可模块化更换任务载荷的水文探测无人艇
1.本发明涉及无人水面艇技术领域,尤其涉及一种可模块化更换任务载荷的水文探测无人艇。
背景技术:
2.无人水面艇(unmanned surface vessel,简称usv),是一种无人操作的水面舰艇。因其具有机动灵活、自主能力强等特点被各个领域应用,在配备控制系统、传感器系统、通信系统后,可实现侦察、搜索、探测、导航和水文地理勘察等多种任务,且相对有人船更为高效安全。
3.现阶段市场上的无人水面艇推进方式既有全驱动也有欠驱动,全驱动一般是指系统的独立控制变量个数等于系统自由度个数的一种推进方式。简单来说,在全驱动的推进方式下,输入变量数一般等于于控制量数。无人水面艇使用全驱动推进方式能够有效应对水流干扰,可一定程度提升无人艇在实际水域的探测能力。
4.但是,市场上大部分无人水面艇的功能设计趋于专一化,即单个无人水面艇仅能实现某一方面(侦察、搜索、探测、导航或水文地理勘察)的功能,而无法兼容多种功能,适应多样化的工作任务与工作环境。
5.另外,现阶段无人水面艇的结构设计趋于一体化,无人艇结构集成度较高,这种一体化设计是为了增强无人艇的强度、改良其运动性能,但因缺少模块化的设计,难以实现较为方便的拆卸、组装、改造与陆上运输。
技术实现要素:
6.基于此,有必要针对上述技术问题,提供一种可模块化更换任务载荷的水文探测无人艇。
7.一种可模块化更换任务载荷的水文探测无人艇,包括:
8.船体,包括上层框架和片体,所述片体对称设置在所述上层框架的底部两侧;
9.推进系统,包括纵向推进器和横向推进器,所述纵向推进器设置在所述船体的艉部,且所述纵向推进器能够提供航行动力、控制船体转向或提供力矩控制船体姿态;所述横向推进器设置在所述船体的艏部,且所述横向推进器能够控制所述船体的转向或平衡力矩;
10.控制单元,包括相互配合的上位机和下位机,所述下位机封装在中控盒内,所述中控盒固定在所述上层框架上,所述控制单元与推进系统电路、gps模块电路、声呐模块电路和通信模块电路相连接。
11.在其中一个实施例中,所述横向推进器通过螺丝安装于船体的内部,所述纵向推进器采用悬挂式固定在所述船体的艉部。
12.在其中一个实施例中,所述上层框架采用u形铝合金材料焊接而成。
13.在其中一个实施例中,所述推进系统电路包括:
14.供电模块;
15.第一信号线,连接在所述下位机和所述纵向推进器之间;
16.第二信号线,连接与所述下位机和所述横向推进器之间。
17.在其中一个实施例中,所述gps模块电路包括:
18.电源线,与所述供电模块相连接;
19.数据传输线,经电平转换器与所述下位机相连接;
20.gps,包括用于接收信号的主天线和从天线,所述主天线和从天线分别设置在所述船体的艉部和艏部。
21.在其中一个实施例中,所述声呐模块电路包括声呐模块,所述声呐模块分别与所述供电模块和下位机相连接。
22.在其中一个实施例中,所述通信模块电路包括蓝牙模块,所述上位机与下位机通过所述蓝牙模块进行通信。
23.上述可模块化更换任务载荷的水文探测无人艇,通过将上层框架和片体采用模块化设计,并兼容搭载推进系统电路、gps模块电路、声呐模块电路和通信模块电路等各类任务载荷,从而可以实现无人艇功能的多样化,使无人艇能够适应更加多元化与复杂化的作业环境,在各类水域对不同类型的水文数据进行探测作业。同时,无人艇的船体结构采用模块化设计,其拆卸、组装、改造更加方便快捷,也便于陆上的运输与携带。
附图说明
24.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
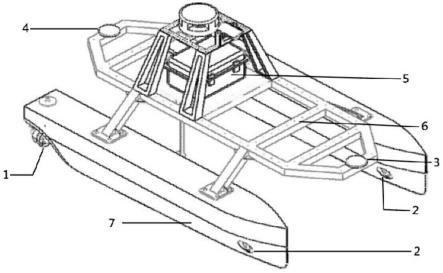
25.图1是本发明的可模块化更换任务载荷的水文探测无人艇的结构示意图;
26.图2是本发明的可模块化更换任务载荷的水文探测无人艇的俯视图;
27.图3是本发明的可模块化更换任务载荷的水文探测无人艇的右视图;
28.图4是本发明的可模块化更换任务载荷的水文探测无人艇的后视图;
29.图5是本发明的系统硬件架构图;
30.图6是本发明的硬件电路设计图;
31.图7是本发明的硬件电路接线图。
具体实施方式
32.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳的实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
33.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
34.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
35.参阅图1-4所示,本发明一实施例提供一种可模块化更换任务载荷的水文探测无人艇,包括:
36.船体,包括上层框架6和片体7,所述片体7对称设置在所述上层框架6的底部两侧;
37.推进系统,包括纵向推进器1和横向推进器2,所述纵向推进器1设置在所述船体的艉部,且所述纵向推进器1能够提供航行动力、控制船体转向或提供力矩控制船体姿态;所述横向推进器2设置在所述船体的艏部,且所述横向推进器2能够控制所述船体的转向或平衡力矩。本实施例中,通过左右两侧的纵向推进器1转速不同的方式控制船体转向或提供力矩控制船体姿态。所述横向推进器2可以参与无人艇靠泊、动力定位等自动化控制里面,用于平衡力矩。
38.控制单元,包括相互配合的上位机和下位机,所述下位机封装在中控盒5内,所述中控盒5固定在所述上层框架6上,所述控制单元与推进系统电路11、gps模块电路8、声呐模块电路9和通信模块电路10相连接。
39.本实施例中,船体为双体船,其总长为1600mm,最大宽度为1100mm,吃水深度约为200mm,排水量不小于40kg。上位机可以为地面遥控电脑等,下位机可以为arduino mega 2560开发板等。其中,船体的部分参数如下表所示:
40.材质玻璃钢航速/(m/s)1.616.46单体重量/kg5.37摩擦阻力rf/n1.9535.57双体重量/kg10.74剩余阻力rr/n6.1814.97片体排水体积/m30.03单体总阻力rts/n8.1350.54双体船排水量/kg60.52双体总阻力rt/n16.26101.08双体船湿表面积/m21.76有效功率/w26.25652.67
41.上述可模块化更换任务载荷的水文探测无人艇,通过将上层框架6和片体7采用模块化设计,并兼容搭载推进系统电路7、gps模块电路8、声呐模块电路9和通信模块电路10等各类任务载荷,从而可以实现无人艇功能的多样化,使无人艇能够适应更加多元化与复杂化的作业环境,在各类水域对不同类型的水文数据进行探测作业。同时,无人艇的船体结构采用模块化设计,其拆卸、组装、改造更加方便快捷,同时也便于陆上的运输与携带。
42.在本发明一实施例中,所述横向推进器2通过螺丝安装于船体的内部,所述纵向推进器1采用悬挂式固定在所述船体的艉部。具体地,横向推进器2安装于船体的内部,可以尽可能地减小对船体流线外形的破坏;而将纵向推进器1采用悬挂式固定方式,其方便了拆装和替换。
43.在本发明一实施例中,所述上层框架6采用u形铝合金材料焊接而成。如此,基于模块化思维,通过螺栓将u形铝合金材料焊接而成上层框架6与船体连接,便可搭载各类任务载荷,实现无人艇功能的多样化。
44.参阅5-7所示:在本发明中,系统硬件包含两部分,分别为无人艇硬件设备与作为地面遥控电脑(上位机)。无人艇硬件设备中,使用一块arduino mega 2560开发板作为控制板(下位机),控制板封装于中控盒5中,使用4个推进器(纵向推进器1和横向推进器2)作为
动力来源,同时,搭载声呐模块、gps等设备读取数据,利用锂电池对无人艇供电。地面遥控电脑中装载有使用c#编写的控制软件,主要实现数据接收、数据实时展示、推进系统控制、数据储存功能。无人艇和地面遥控电脑之间通过蓝牙模块实现双向通信。
45.具体地,在本发明一实施例中,所述推进系统电路11包括:
46.供电模块111;
47.第一信号线112,连接在所述下位机和所述纵向推进器1之间;
48.第二信号线113,连接与所述下位机和所述横向推进器2之间。
49.本实施例中,每一片体7上的推进器(含1个横向推进器2与1个纵向推进器1),由该片体7上的供电模块111(锂电池)接入24v稳压模块后进行独立供电,并通过一条共地线进行共地。同时,各推进器的第一信号线112和第二信号线113与arduino mega 2560开发板的pwm引脚连接,在系统运行过程中,通过该信号线传输pwm信号,实现对推进器转速的实时控制。
50.在本发明一实施例中,所述gps模块电路8包括:
51.电源线81,与供电模块111相连接;此时,供电模块111可以提供12v电源。
52.数据传输线83,经电平转换器与所述下位机相连接;
53.gps82,包括用于接收信号的主天线4和从天线3,所述主天线4和从天线3分别设置在所述船体的艉部和艏部。
54.本实施例中,gps通过电源线81与12v电源连接,同时,通过一条共地线进行共地;另一路为数据传输线83,首先,数据传输线83与电平转换器相连,将gps输出的rs232电平转换为arduino适配的ttl电平。电平转换器含4个引脚,其中2个引脚与arduino mega 2560开发板相连进行串口通信(数据传输),另外2个引脚连接5v电源并进行共地,对电平转换器本身供电。
55.在本发明一实施例中,所述声呐模块电路9包括声呐模块,所述声呐模块分别与供电模块111和下位机相连接。此时,供电模块111可以提供5v电源。
56.本实施例中,声呐模块含4个引脚,其中2个引脚与arduino mega 2560开发板相连进行串口通信(数据传输),另外2个引脚连接5v电源并进行共地,对声呐本身供电。
57.在本发明一实施例中,所述通信模块电路10包括蓝牙模块,所述上位机与下位机通过所述蓝牙模块进行通信。
58.具体地,上位机与下位机之间由2个完全相同的蓝牙模块进行通信,上位机与其中一个蓝牙模块通过一个usb-ttl转换器进行连接,另一个蓝牙模块同样通过其中2个引脚与arduino mega 2560开发板相连进行串口通信(数据传输),另外,2个引脚连接5v电源并进行共地,对模块本身供电。系统上电后,通过蓝牙模块实现地面遥控电脑(上位机)与arduino mega 2560开发板(下位机)的无线通信,再由arduino mega 2560开发板直接完成无人艇推进控制、水文探测数据的读取、解析、发送等任务。
59.需要指出的是,arduino mega 2560开发板本身也需要进行5v供电,此处,采用7-12v电源与arduino mega 2560开发板上的vin与gnd引脚相连的形式进行供电(并同时实现共地)。
60.综上所述,本发明的优点如下:
61.(1)、船体结构采用模块化设计,拆卸、组装、改造方便快捷,同时,便于陆上的运输
与携带。
62.(2)、上层框架采用模块化设计,可兼容搭载各类任务载荷,实现无人艇功能的多样化,使无人艇能够适应更加多元化与复杂化的作业环境。
63.(3)、无人艇具备一套较为完善的,含有数据采集、数据处理输出、控制推进功能的底层控制系统,并能够通过与上位机的交互实现对全驱动无人艇的远程控制与数据传输,在一定程度上提升了传统无人艇在实际水域的探测能力。
64.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
65.以上所述实施例仅表达了本发明的几种实施方式,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1