一种三立柱漂浮式风机基础撑杆结构强度的计算方法与流程
1.本发明涉及一种三立柱漂浮式风机基础撑杆结构强度的计算方法。
背景技术:
2.漂浮式风电与固定式风电是对应的,其定义和区分取决于风机的基础结构是固定式结构还是浮式结构。从海洋石油的经验来看,由于水深增加导致的固定式基础在海床处的荷载增大等原因,固定式基础的投资成本一般随着水深的增加呈指数增长。当水深超过一定深度之后,固定式风机的投资收益就会变得较差。根据海上石油的相关经验,会出现一个临界水深,当超过这个水深之后,漂浮式风电的投资收益会高于固定式风电的投资收益。漂浮式风电研究的意义就是为了降低漂浮式风电的投资成本,以实现对深远海域海上风能的利用。
3.目前主流的三种漂浮式风机基础型式是半潜式、tlp式(张力腿式)和spar式(单柱式)。其中,应用广泛、技术成熟的半潜式漂浮式风机基础是更加适合现阶段海上风电发展的基础形式。半潜式漂浮式风机基础一般拥有多个立柱及其连接结构,现阶段立柱多采用钢制圆筒,而连接结构多采用加筋板材、圆管和方管等结构,本发明的撑杆即为立柱间的连接结构。为保证基础的耐波性,往往立柱间距较大,撑杆受到的载荷较大,因此漂浮式风机基础对撑杆的强度有较高要求。
4.目前,海洋工程行业内针对海洋平台结构强度的计算方法已经较为成熟,通常采用设计波法对海洋平台的总强度进行分析。该方法首先根据平台的主尺度设计波浪参数,通过势流理论计算平台所受的波浪载荷,将波浪载荷映射于有限元模型中开展总强度分析。此方法也可运用于三立柱漂漂浮式风机基础撑杆的结构强度计算,但该方法需要运用势流理论计算波浪载荷并把载荷映射于有限元模型中,对模型的完整度要求较高,不适用于结构模糊的概念设计阶段,并且该方法较为复杂,步骤繁琐较为耗时。
技术实现要素:
5.本发明的目的在于克服现有技术的缺陷而提供一种三立柱漂浮式风机基础撑杆结构强度的计算方法,它能显著提高计算效率,从而能快速初步确定撑杆结构的尺寸。
6.本发明的目的是这样实现的:一种三立柱漂浮式风机基础撑杆结构强度的计算方法,包括以下步骤:
7.步骤一,选取危险工况,即选取四种风机基础易失效或破坏的危险工况和对应的波形;
8.步骤二,波浪参数确定,根据四种危险工况的波形确定四种危险工况下的波长,并根据波浪理论公式确定四种危险工况下的波浪周期和波高;
9.步骤三,载荷确定,即确定风机基础的三根立柱上所受到的波浪载荷;
10.步骤四,结构模型建立,即在ansys design modeler模块中建立风机基础的梁系结构模型;
11.步骤五,边界条件施加,将六个边界条件施加在梁系结构模型上,即三个垂直向上的弹簧约束、两个波浪方向水平位移约束和一个垂直于波浪方向水平位移约束;
12.步骤六,模型有限元离散,在ansys static structural模块中对梁系结构模型开展有限元离散,形成一维网格的有限元模型;
13.步骤七,载荷施加,在有限元模型中施加波浪载荷,波浪载荷的方向由四种危险工况的波形决定,将波浪载荷以点载荷的形式施加于立柱的吃水部分的形心;
14.步骤八,静力学分析,在ansys static structural模块中开展静力学分析,得到四种危险工况下撑杆的最大轴向压应力σ
dc
和撑杆的最大组合应力σ
mc
;
15.步骤九,强度校核,将撑杆材料的屈服强度与撑杆的最大组合应力σ
mc
进行校核,将撑杆材料的屈曲强度与撑杆的最大轴向压应力σ
dc
进行校核,判断撑杆的结构强度是否足够。
16.上述的三立柱漂浮式风机基础撑杆结构强度的计算方法,其中,进行步骤一时,选取的第一种危险工况为0
°
入射角分离力最大工况,选取的第二种危险工况为0
°
入射角挤压力最大工况,选取的第三种危险工况为30
°
入射角分离力最大工况,选取的第四种危险工况为30
°
入射角挤压力最大工况。
17.上述的三立柱漂浮式风机基础撑杆结构强度的计算方法,其中,进行步骤二时,包括:
18.a.波长确定,即根据四种危险工况时的波形一一对应地确定四种危险工况下的波长l与立柱的间距b之间的关系:
[0019][0020]
式(1)中,l1为第一种危险工况下的波长;l2为第二种危险工况下的波长;l3为第三种危险工况下的波长;l4为第四种危险工况下的波长;b为立柱的间距;
[0021]
b.波浪周期确定,根据线性波浪理论得到波浪周期t公式:
[0022][0023]
式(2)中,l为波长;k为波数,d为水深;
[0024]
c.波高确定,根据线性波波高公式(3)计算波高h:
[0025][0026]
式(3)中,t为波浪周期;h
100
为百年一遇的波高。
[0027]
上述的三立柱漂浮式风机基础撑杆结构强度的计算方法,其中,进行步骤三时,采用莫里森方程计算波浪载荷,如下:
[0028][0029]
式(4)中,fn为波浪载荷;ρ为海水密度;ca为附加质量系数,立柱为圆柱形时ca=1;cd为拖曳系数,立柱为圆柱形时cd=1;a为立柱的横截面的面积;d为立柱的直径;v&为水质点的水平运动加速度;v为水质点的水平运动速度;
[0030]
根据线性波浪理论得到波浪中水质点的水平运动速度v:
[0031][0032]
根据线性波浪理论得到波浪中水质点的水平运动加速度
[0033][0034]
式(5)和式(6)中,h为波高;k为波数,l为波长;d为水深;z为水质点的深度;x为波浪的传播方向;ω为波浪的圆频率;t为时间。
[0035]
上述的三立柱漂浮式风机基础撑杆结构强度的计算方法,其中,进行步骤五时,设置的弹簧约束的弹簧刚度为水浮力载荷的等效,弹簧刚度ks的计算公式如下:
[0036][0037]
式(7)中,ρ为海水密度;d为立柱的直径;g为重力加速度系数9.8n/kg。
[0038]
上述的三立柱漂浮式风机基础撑杆结构强度的计算方法,其中,进行步骤九时,包括:
[0039]
a.屈服强度校核,通过下式确定撑杆的许用屈服应力[σs]:
[0040]
[σs]=σs/ss[0041]
其中,σs为撑杆材料的屈服强度,mpa;ss为撑杆材料的屈服安全系数;
[0042]
b.屈曲强度校核,通过下式确定撑杆的许用屈曲应力[σ
cr
]:
[0043]
[σ
cr
]=σ
cr
/s
cr
[0044]
其中,σ
cr
为撑杆材料的屈曲强度,mpa;s
cr
为撑杆材料的屈曲安全系数。
[0045]
受压杆件材料的屈曲强度σ
cr
按下式计算所得:
[0046][0047]
式(8)中:σe为欧拉应力,mpa,l为杆件无支撑长度;r为对应于杆件无支撑长度l的横剖面回转惯性半径;k为等效长度系数;e为撑杆材料的杨氏模量;
[0048]
当撑杆的最大组合应力σ
mc
小于撑杆的许用屈服应力[σs],即σ
mc
<[σs],同时撑杆的最大轴向压应力σ
dc
小于撑杆的许用屈曲应力[σ
cr
],即σ
dc
<[σ
cr
],撑杆的结构强度才会是
足够的。
[0049]
本发明的三立柱漂浮式风机基础撑杆结构强度的计算方法具有以下特点:
[0050]
对模型的完整度要求不高,最大可能地优化和简化了计算步骤和模型,能显著提高计算效率,从而能快速初步确定撑杆结构的尺寸,非常适用于结构模糊的概念设计阶段的撑杆强度计算。
附图说明
[0051]
图1为本发明涉及的三立柱漂浮式风机基础的结构示意图;
[0052]
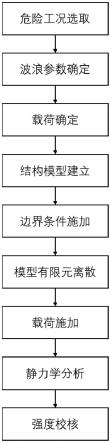
图2为本发明的三立柱漂浮式风机基础撑杆结构强度的计算方法的流程图;
[0053]
图3a为本发明的步骤一选取的第一种危险工况下风机基础所受波浪力的示意图;
[0054]
图3b为本发明的步骤一选取的第一种危险工况下的波形示意图;
[0055]
图4a为本发明的步骤一选取的第二种危险工况下风机基础所受波浪力的示意图;
[0056]
图4b为本发明的步骤一选取的第二种危险工况下的波形示意图;
[0057]
图5a为本发明的步骤一选取的第三种危险工况下风机基础所受波浪力的示意图;
[0058]
图5b为本发明的步骤一选取的第三种危险工况下的波形示意图;
[0059]
图6a为本发明的步骤一选取的第四种危险工况下风机基础所受波浪力的示意图;
[0060]
图6b为本发明的步骤一选取的第四种危险工况下的波形示意图;
[0061]
图7为本发明的步骤四建立的风机基础的梁系结构模型的示意图;
[0062]
图8为本发明的步骤五在梁系结构模型施加的边界条件的示意图;
[0063]
图9为本发明的步骤六后得到的有限元模型的示意图。
具体实施方式
[0064]
下面将结合附图对本发明作进一步说明。
[0065]
本发明的三立柱漂浮式风机基础撑杆结构强度的计算方法,适用的三立柱漂浮式风机基础包括布置在一个等边三角形的三个角部的第一立柱11、第二立柱12和第三立柱13以及三组一一对应地连接在第一立柱11与第二立柱12之间、第二立柱12与第三立柱13之间和第一立柱11与第三立柱13的撑杆2(见图1),三根立柱的间距为160m,立柱的直径为15m、立柱的高度为30m,撑杆为钢制圆管且撑杆材料的极限强度为355mpa,风机基础的总重量为7570.45t,立柱的吃水为14m。
[0066]
请参阅图2,本发明的三立柱漂浮式风机基础撑杆结构强度的计算方法,包括以下步骤:
[0067]
步骤一,危险工况选取,漂浮式风机基础在服役期间将遭受不同方向、不同波长的波浪,但基础失效或破坏往往发生在危险工况下,因此选取的三立柱漂浮式风机基础的危险工况有四种,第一种危险工况为0
°
入射角分离力最大工况,此时第一立柱11位于波峰位置,第二立柱12和第三立柱13位于波峰与波谷中间,使连接在第二立柱12和第三立柱13之间一组撑杆2受到轴向相背的分离力(见图3a和图3b);第二种危险工况为0
°
入射角挤压力最大工况,此时第一立柱11位于波谷位置,第二立柱12和第三立柱13位于波谷与波峰中间,使连接在第二立柱12和第三立柱13之间的一组撑杆2受到轴向相对的挤压力(见图4a和图4b);第三种危险工况为30
°
入射角分离力最大工况,此时第三立柱13位于一个波峰与后一
个波谷中间,第二立柱12和第一立柱11位于波峰与前一个波谷中间,使连接在第三立柱13和第二立柱12之间的一组撑杆2以及连接在第三立柱13和第一立柱11之间的一组撑杆均受到30
°
入射角分离力(见图5a和图5b);第四种危险工况为30
°
入射角挤压力最大工况,此时第三立柱13均位于一个波谷与后一个波峰中间,第二立柱12和第一立柱11位于波谷与前一个波峰中间,使连接在第三立柱13和第二立柱12之间的一组撑杆2以及连接在第三立柱13和第一立柱11之间的一组撑杆2均受到30
°
入射角挤压力(见图6a和图6b);
[0068]
步骤二,波浪参数确定,根据四种危险工况的波形确定四种危险工况下的波长,并根据波浪理论公式确定四种危险工况下的波浪周期和波高;
[0069]
a.波长确定,根据四种危险工况时的波形一一对应地确定四种危险工况下的波长l与立柱的间距b之间的关系:
[0070][0071]
式(1)中,b为立柱的间距;l1为第一种危险工况下的波长;l2为第二种危险工况下的波长;l3为第三种危险工况下的波长;l4为第四种危险工况下的波长;
[0072]
b.波浪周期确定,根据线性波浪理论得到波浪周期t公式(2):
[0073][0074]
式(2)中,l为波长;k为波数,d为水深,取50m;
[0075]
c.波高确定,根据海工行业内推荐的线性波波高公式(3)计算波高h:
[0076][0077]
式(3)中,t为波浪周期;h
100
为百年一遇的波高,取20m;
[0078]
根据以上公式(1)、(2)、(3),最终形成四种危险工况下的波浪参数,参见下表1:
[0079]
表1
[0080]
工况波长l(m)波周期t(s)波高h(m)工况132016.5018.32工况232016.5018.32工况3277.1314.7918.01工况4277.1314.7918.01
[0081]
步骤三,载荷确定,由于撑杆的尺度远小于立柱的尺度,撑杆所受到的浮力及波浪载荷都远小于立柱,因此本发明仅考虑作用于立柱上的波浪载荷;立柱所受到的载荷分为重力载荷、浮力载荷和波浪载荷。本发明总重力载荷按结构实际重量确定,由于尺度原因,重力对撑杆结构强度的影响较小,因此将风机基础的总重力载荷等分后仅施加于三根立柱
上,而三立柱基础由于其三角形的特性,三个立柱均能在浮力的作用下抵消重力,因此最终立柱上不施加重力载荷和浮力载荷,仅需要确定立柱上的波浪载荷;现有的三立柱漂浮式风机基础的立柱直径为15m,而四种危险工况的波长为270~320m,立柱相对于波浪属于小构件,满足莫里森morison方程的使用条件,遂采用海洋工程中应用广泛的莫里森morison方程计算波浪载荷,如下:
[0082][0083]
式(4)中,fn为波浪载荷;ρ为海水密度;ca为附加质量系数,立柱为圆柱形时ca=1;cd为拖曳系数,立柱为圆柱形时cd=1;a为立柱的横截面的面积;d为立柱的直径;v&为水质点的水平运动加速度;v为水质点的水平运动速度;
[0084]
根据线性波浪理论得到波浪中水质点的水平运动速度v:
[0085][0086]
根据线性波浪理论得到波浪中水质点的水平运动加速度
[0087][0088]
式(5)和式(6)中,h为波高;k为波数,l为波长;d为水深;z为水质点的深度;x为波浪的传播方向;ω为波浪的圆频率;t为时间;
[0089]
根据以上公式(4)、(5)、(6)得到四种危险工况下第一立柱11、第二立柱12和第三立柱13所受到的波浪载荷,参见下表2
[0090]
表2
[0091]
[0092][0093]
步骤四,结构模型建立,在ansys design modeler模块中建立风机基础的梁系结构模型;本发明针对的风机基础的主体结构为立柱与撑杆,立柱的强度不在本发明的考虑范围内,因此将整体模型简化为梁系结构模型,梁系结构模型中的撑杆赋予实际撑杆剖面,而立柱不赋予剖面,最后再赋予风机基础各部件实际质量形成完整的结构模型(见图7);
[0094]
步骤五,边界条件施加,在梁系结构模型上施加三个垂直向上的弹簧约束、两个波浪方向水平位移约束和一个垂直于波浪方向水平位移约束;即在第一立柱11、第二立柱12和第三立柱13的底部各自施加一个垂直向上的弹簧约束31,在第一立柱11的底部和第三立柱13的底部各自施加一个波浪方向水平位移约束32,并在第一立柱11的底部施加一个垂直于波浪方向水平位移约束33(见图8);弹簧的刚度为水浮力载荷的等效,弹簧刚度ks的计算公式(7)如下:
[0095][0096]
式(7)中,ρ为海水密度;d为立柱的直径;g为重力加速度系数9.8n/kg;计算得到弹簧的刚度ks=1.77
×
106n/m。
[0097]
步骤六,模型有限元离散,在ansys static structural模块中对梁系模型开展有限元离散,使梁系结构模型离散为一维网格的有限元模型,网格大小根据计算所需精度确定(见图9);
[0098]
步骤七,载荷施加,在有限元模型中施加步骤三确定的波浪载荷,波浪载荷的方向由四种危险工况的波形决定,将波浪载荷以点载荷的形式施加于立柱的吃水部分的形心;
[0099]
步骤八,静力学分析,在ansys static structural模块中对施加了波浪载荷和边界条件后的有限元模型开展静力学分析,得到四种危险工况下撑杆的最大轴向压应力σ
dc
和最大组合应力σ
mc
,具体参见下表3,
[0100]
表3
[0101][0102]
步骤九,强度校核,将撑杆材料的屈服强度与撑杆的最大组合应力σ
mc
进行校核,将
撑杆材料的屈曲强度与撑杆的最大轴向压应力σ
dc
进行校核,判断撑杆的结构强度是否足够;
[0103]
a.进行屈服强度校核时,通过下式确定撑杆的许用屈服应力[σs]:
[0104]
[σs]=σs/ss[0105]
其中,σs为撑杆材料的屈服强度,mpa;ss为撑杆材料的屈服安全系数,取1.25;
[0106]
得到[σs]=284
[0107]
将撑杆材料的屈服强度与撑杆的最大组合应力σ
mc
进行校核,撑杆的最大组合应力σ
mc
=48.26小于撑杆的许用屈服应力[σs]=284,即σ
mc
<[σs];
[0108]
b.进行屈曲强度校核时,通过下式确定撑杆的许用屈曲应力[σ
cr
]:
[0109]
[σ
cr
]=σ
cr
/s
cr
[0110]
其中,σ
cr
为撑杆材料的屈曲强度,mpa;s
cr
为撑杆材料的屈曲安全系数。
[0111]
受压杆件材料的屈曲强度σ
cr
按下式计算所得:
[0112][0113]
式(8)中:σe为欧拉应力,mpa,l为杆件无支撑长度;r为对应于杆件无支撑长度l的横剖面回转惯性半径;k为等效长度系数,取0.65;e为撑杆材料的杨氏模量;
[0114]
得到[σ
cr
]=83.04
[0115]
将撑杆材料的屈曲强度与撑杆的最大轴向压应力σ
dc
进行校核,撑杆的最大轴向压应力σ
dc
=47.44小于撑杆的许用屈曲应力[σ
cr
]=83.04,即σ
dc
<[σ
cr
];
[0116]
综上,撑杆的最大组合应力σ
mc
小于撑杆的许用屈服应力[σs],即σ
mc
<[σs],同时撑杆的最大轴向压应力σ
dc
小于撑杆的许用屈曲应力[σ
cr
],即σ
dc
<[σ
cr
],撑杆的结构强度是足够的。
[0117]
以上实施例仅供说明本发明之用,而非对本发明的限制,有关技术领域的技术人员,在不脱离本发明的精神和范围的情况下,还可以作出各种变换或变型,因此所有等同的技术方案也应该属于本发明的范畴,应由各权利要求所限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1