一种智慧城市河道水生植物清理系统及其工作方法与流程
1.本发明涉及河道水生植物清理系统领域,尤其是涉及一种智慧城市河道水生植物清理系统及其工作方法。
背景技术:
2.水葫芦具有繁殖速度快、生物产量大、吸收氮磷能力强等特点,对各类污染水体和污染物均表现出显著的净化效果和较强的净化能力,是国内外公认的污染水体生物修复优势物种,被广泛地用于净化污染水体。同时,水葫芦营养丰富,不仅含有蛋白质、钙、磷等常规营养成分,而且含有铁、镁等微量元素,以及赖氨酸,缬氨酸等氨基酸,作为畜禽饲料原材料有很大的利用价值。
3.现有技术中,对水生植物进行打捞时,由于清理船的承载量有限,而水生植物的含水量很高,清理船需要频繁的将打捞的水生植物卸载到岸上。因此,我们提供了一种智慧城市河道水生植物清理系统及其工作方法。
技术实现要素:
4.本发明所要解决的是如何提高清理船对河道中水生植物的清理效率的技术问题,提供了一种智慧城市河道水生植物清理系统及其工作方法。
5.本发明解决其技术问题所采用的技术方案是:一种智慧城市河道水生植物清理系统,包括清理船、输送带、粉碎装置、压缩装置、码放装置、控制系统。粉碎装置包括粉碎斗、若干粉碎辊。粉碎斗设置于清理船上方,且与清理船固定连接。若干粉碎辊横向设置于粉碎斗内,粉碎辊的转轴贯穿粉碎斗延伸至粉碎斗外侧,粉碎辊的转轴固定连接有粉碎电机,粉碎电机处于粉碎斗外。压缩装置包括压缩筒、压缩头、压缩气缸、阻挡板、伸缩气缸、若干过滤孔、绞龙、传动电机、导向筒、集水盒。导向筒倾斜设置于粉碎斗下方,导向筒的上端与粉碎斗的下端连通。传动电机设置于粉碎斗内,处于粉碎辊下方,传动电机与粉碎斗固定,传动电机的转轴轴线与导向筒的轴线重合。绞龙倾斜设置于粉碎斗内,其下端延伸至导向筒内,绞龙的上端转轴与传动电机的转轴固定连接。压缩筒横向设置于导向筒下方,压缩筒的中部与导向筒的下端连通,压缩筒的轴线与导向筒的轴线相交。阻挡板沿导向筒的倾斜方向设置于导向筒侧方,且处于压缩筒侧方,阻挡板贯穿压缩筒延伸至压缩筒内,用于将压缩筒堵塞。伸缩气缸设置于压缩筒侧方,沿阻挡板的滑动方向设置,且与压缩筒固定连接,伸缩气缸的伸缩端与阻挡板连接。压缩头滑动设置于压缩筒内,处于阻挡板的侧方,压缩头与阻挡板分别处于导向筒和压缩筒的连通口的两侧。压缩气缸设置于压缩筒内,与压缩筒固定连接,且处于压缩头远离阻挡板的一侧,且沿压缩头的移动方向设置,压缩气缸的伸缩端与压缩头连接。若干过滤孔设置于压缩筒侧壁上,处于压缩头与阻挡板之间。集水盒设置于若干过滤孔下方,集水盒连通有排水管。输送带倾斜安装于清理船侧部,输送带的上端处于粉碎斗的正上方。码放装置与压缩装置连接,用于对经过压缩装置压缩后的干饼进行码放储存。控制系统与输送带、粉碎装置、压缩装置、码放
装置连接。
6.通过输送带将河道中的水生植物持续输送到粉碎斗中,同时控制系统控制粉碎电机启动,粉碎电机带动粉碎辊转动,粉碎辊对植物进行粉碎。控制系统控制传动电机启动,传动电机带动绞龙转动,绞龙带动粉碎斗中经过粉碎的水生植物通过导向筒进入压缩筒内,然后控制压缩气缸伸长,压缩气缸带动压缩头向阻挡板方向移动,将压缩头与阻挡板之间的水生植物压缩成干饼,使水生植物中的水分从过滤孔流出到集水盒中,之后通过排水管排入河道内。之后控制系统控制伸缩气缸伸长,伸缩气缸带动阻挡板移动到压缩筒外,然后控制压缩气缸伸长,压缩气缸带动压缩头移动,将干饼推动到码放装置中进行码放储存。之后控制系统控制压缩气缸收缩,压缩气缸带动压缩头移动到初始位置,然后控制伸缩气缸收缩,伸缩气缸带动阻挡板移动到压缩筒内,将压缩筒堵塞。通过设置粉碎装置、压缩装置,能够去除水生植物中的水分,提高清理船的单次打捞量,提高了清理船对河道中水生植物的清理效率。
7.进一步的,码放装置包括码放盒、若干升降气缸、储存箱、若干推动气缸、安装板、压力感应器。压缩筒的内部空腔为长方体。码放盒的内部空腔为长方体,码放盒的内部空腔的截面外形与压缩筒内部空腔的截面外形相适应,码放盒横向设置于清理船上方,处于压缩筒侧方,码放盒与压缩筒相互平行,码放盒靠近压缩筒的一端为开口,且与压缩筒的一端紧贴并连通。若干升降气缸竖向设置于清理船顶部,且处于码放盒的一侧。安装板横向设置于若干升降气缸上方,处于码放盒靠近升降气缸的一侧,且与若干升降气缸的上部伸缩端固定连接,安装板与码放盒相互平行。若干推动气缸横向设置于码放盒靠近升降气缸的一侧,且与安装板固定连接,推动气缸的伸缩杆与码放盒固定连接,推动气缸与码放盒垂直。储存箱设置于清理船上方,处于码放盒远离推动气缸的一侧,储存箱面向码放盒的侧部设置有箱口,储存箱的内部空腔的横向长度与码放盒的横向长度相同。压力感应器设置于码放盒面向压缩筒的内侧面上。
8.压缩气缸带动压缩头移动到压缩筒靠近码放盒的端口处,将干饼推动到码放盒内。当压力感应器被干饼触发后,即干饼将码放盒装满后,控制系统通过升降气缸控制码放盒升降,通过推动气缸控制码放盒横向移动到储存箱内,将码放盒内的干饼在储存箱内由下到上,由内到外依次进行有序的码放,使储存箱能够储存更多的干饼,当储存箱被装满后,清理船将储存箱卸下,并更换新的储存箱。通过设置码放装置,能够提高清理船的单次打捞量,提高了清理船对水生植物的清理效率,且通过储存箱对干饼进行储存和打包更方便进行运输。设置码放盒和压缩筒的内部空腔为长发体,能够压缩出方型的干饼,在进行码放时更加稳定和紧密。
9.进一步的,码放装置包括顶出装置、升降板、联动装置、滑动槽。码放盒面向储存箱的侧部为开口。滑动槽竖向设置于清理船顶部,处于储存箱与码放盒之间。升降板竖向滑动设置于滑动槽内,处于储存箱与码放盒之间,且分别与储存箱的箱口和码放盒的开口紧贴,用于将码放盒面向储存箱的开口封闭。联动装置与升降板连接,用于带动升降板升降。顶出装置设置于码放盒上,用于将码放盒内的干饼顶出到储存箱内。
10.控制系统通过升降气缸控制码放盒上升,使码放盒与升降板分离,之后控制系统通过推动气缸控制码放盒横向移动到储存箱内,然后通过顶出装置将码放盒内的干饼顶出到储存箱中进行码放。之后控制系统通过升降气缸、推动气缸控制码放盒移动到初始位置,
使码放盒与压缩筒连通,使码放盒面向储存箱的开口被升降板封闭。当储存箱内的一层干饼被码放完成后,联动装置带动升降板上升一层干饼的高度,将储存箱内的干饼阻挡,防止储存箱内的干饼漏出,之后控制系统通过升降气缸、推动气缸控制码放盒移动到这一层干饼的上方进行码放。设置联动装置和升降板,能够使升降板随储存箱内干饼的高度的增加而上升,防止储存箱内的干饼从储存箱箱口漏出。
11.进一步的,顶出装置包括顶出板、若干导向杆、若干复位弹簧、第一电磁铁、滑动板。顶出板设置于码放盒内,且与码放盒面向储存箱的内侧面紧贴。导向杆横向设置于码放盒远离储存箱的一侧,导向杆与推动气缸的伸缩杆相互平行,导向杆的一端贯穿码放盒与顶出板固定连接。滑动板为铁磁性材料,设置于码放盒远离储存箱的一侧,滑动套设于若干推动气缸的伸缩杆上,滑动板与若干导向杆固定连接。若干复位弹簧分别套设于若干导向杆上,处于滑动板与码放盒之间,复位弹簧为压缩状态。第一电磁铁设置于码放盒与滑动板之间,且与码放盒固定。
12.当顶出装置启动时,控制系统控制第一电磁铁启动,第一电磁铁吸引滑动板移动,滑动板通过导向杆带动顶出板移动,将码放盒内的干饼顶出到储存箱内。之后控制系统控制第一电磁铁关闭,在复位弹簧的作用下滑动板移动到初始位置,滑动板通过导向杆带动顶出板移动到初始位置。设置顶出装置,能够自动将码放盒内的全部干饼同步顶出,将码放盒内的干饼码放到储存箱内。
13.进一步的,码放装置包括若干叉杆、连动板、若干伸缩弹簧。阻挡板处于压缩筒远离储存箱的一侧,阻挡板的滑动方向与顶出板的移动方向平行。若干叉杆设置于码放盒远离储存箱的一侧,且贯穿码放盒靠近压缩筒的一端和顶出板延伸至码放盒内,叉杆与顶出板的移动方向平行。连动板竖向设置于若干叉杆和阻挡板远离储存箱的一侧,连动板与若干叉杆固定连接。若干伸缩弹簧分别套设于若干叉杆上,处于连动板与码放盒之间,伸缩弹簧的两端分别与连动板和码放盒连接。
14.在压缩气缸带动压缩头移动将干饼推动到码放盒中时,控制系统控制伸缩气缸伸长带动阻挡板向外侧移动,阻挡板推动连动板向外侧移动,连动板带动若干叉杆向外侧移动。在压缩气缸带动压缩头移动将干饼推动到码放盒中后,控制系统控制伸缩气缸收缩带动阻挡板将压缩筒堵塞,伸缩弹簧带动连动板、若干叉杆向内侧移动,使若干叉杆插入码放盒中靠近压缩筒的一端的干饼进行固定,防止干饼漏出。当控制系统控制码放盒移动进行码放时,若干叉杆会插入码放盒中靠近压缩筒的一端的干饼进行固定,防止干饼漏出。设置与阻挡板连动的叉杆,能够自动将码放盒中靠近压缩筒的一端的干饼固定,防止干饼在码放的移动过程中从码放盒中漏出。
15.进一步的,码放装置包括箱门、两个第一滑道、两个第一滑块、辅助板。箱门设置于储存箱侧方,将储存箱的箱口封闭,箱门设置于升降板上方。两个第一滑道为t型滑道,竖向设置于储存箱靠近箱门的侧面上,分别处于储存箱的箱口的两侧。第一滑块滑动设置于第一滑道内,且与箱门固定连接。辅助板为铁磁性材料,横向设置于箱门外侧,且与箱门的底部固定连接,辅助板的底面与箱门的底面处于同一平面内。联动装置包括荆齿结构、若干支撑气缸。荆齿结构与升降板连接,用于使升降板仅能够上升。若干支撑气缸竖向固定于升降板侧面上,且分别处于储存箱的箱口的两侧,支撑气缸的上部伸缩端与辅助板相抵,支撑气缸的上部伸缩端安装有第二电磁铁。
16.在将清理船上的储存箱更换后,控制系统控制支撑气缸伸长,支撑气缸推动箱门向上移动,使升降板与箱门之间的距离大于码放盒的高度。同时控制系统控制第二电磁铁启动,第二电磁铁将辅助板吸附。当控制系统通过升降气缸、推动气缸带动码放盒进行码放时,码放盒会推动辅助板向上移动,辅助板带动箱门向上移动到对应位置,并通过支撑气缸带动升降板同步上升,然后升降板在荆齿结构的作用下固定,并通过支撑气缸支撑箱门。每当完成对储存箱内一层干饼的码放后,码放盒会推动箱门、升降板向上移动一层干饼的高度,之后升降板在荆齿结构的作用下固定,并通过支撑气缸支撑箱门。通过设置荆齿结构、支撑气缸、第二电磁铁,能够在完成对储存箱内一层干饼的码放后,自动推动箱门和升降板上升一层干饼的高度,完成箱门的开启,还能够通过升降板对储存箱内干饼进行阻挡。设置辅助板,使工作人员在打开储存箱时能够通过辅助板将箱门滑动打开,更加方便。
17.进一步的,荆齿结构包括齿条、转动荆杆、扭簧、第三电磁铁、安装槽。齿条竖向设置于升降板的侧面上。安装槽设置于滑动槽内壁上,且与齿条相对设置。转动荆杆为铁磁性材料,倾斜设置于安装槽内,其上端与齿条啮合,下端通过转轴与安装槽内壁转动连接,转动荆杆的转动轴线横向设置。扭簧套设于转动荆杆的转轴上,其两端分别与安装槽内壁和转动荆杆连接。第三电磁铁设置于安装槽内,处于转动荆杆远离齿条的一侧,用于吸引转动荆杆转动与齿条分离。
18.当升降板带动齿条上升时,齿条会推动转动荆杆转动,使转动荆杆与齿条产生相对移动,之后转动荆杆在扭簧作用下转动与齿条啮合,将升降板固定。当储存箱被装满后,控制系统控制支撑气缸收缩,使箱门与升降板相接,然后控制第三电磁铁启动,第三电磁铁吸引转动荆杆转动,使转动荆杆与齿条分离,之后升降板和箱门在重力作用下下降,使升降板下降到初始位置,使箱门下降将储存箱的箱口封闭,然后控制系统控制第二电磁铁、第三电磁铁关闭,使支撑气缸与辅助板分离,之后对储存箱进行更换。设置可控制的荆齿结构,能够在储存箱被装满后,自动将箱门关闭。
19.进一步的,压缩装置包括切断刀。压缩头的长度大于阻挡板与导向筒和压缩筒的连通口之间的距离。切断刀为环状,设置于压缩头靠近阻挡板的侧面上,切断刀的刀口朝向阻挡板,切断刀的外侧面与压缩筒的内侧面紧贴。
20.当压缩头带动切断刀移动时,能够将过滤孔以及导向筒和压缩筒的连通口处的植物切断,防止水生植物将压缩头卡死。
21.一种智慧城市河道水生植物清理系统的工作方法,在将清理船上的储存箱更换后,控制系统控制支撑气缸伸长,支撑气缸推动箱门向上移动,使升降板与箱门之间的距离大于码放盒的高度。同时控制系统控制第二电磁铁启动,第二电磁铁将辅助板吸附。当控制系统通过升降气缸、推动气缸带动码放盒进行码放时,码放盒会推动辅助板向上移动,辅助板带动箱门向上移动到对应位置,并通过支撑气缸带动升降板同步上升,然后升降板在荆齿结构的作用下固定,并通过支撑气缸支撑箱门。
22.将箱门、码放盒、升降板联动,能够自动开启箱门,还能够通过升降板对储存箱内的干饼进行阻挡。
23.进一步的,当储存箱被装满后,控制系统控制支撑气缸收缩,使箱门与升降板相接,然后控制第三电磁铁启动,第三电磁铁吸引转动荆杆转动,使转动荆杆与齿条分离,之后升降板和箱门在重力作用下下降,使升降板下降到初始位置,使箱门下降将储存箱的箱
口封闭,然后控制系统控制第二电磁铁、第三电磁铁关闭,使支撑气缸与辅助板分离,之后对储存箱进行更换。
24.通过可控制的荆齿结构,能够在储存箱被装满后,自动将箱门关闭,还能防止储存箱内的干饼在箱门关闭过程中漏出。
25.本发明的有益效果:1、通过设置粉碎装置、压缩装置,能够去除水生植物中的水分,提高清理船的单次打捞量,提高了清理船对河道中水生植物的清理效率。
26.2、通过设置码放装置,能够提高清理船的单次打捞量,提高了清理船对水生植物的清理效率,且通过储存箱对干饼进行储存和打包更方便进行运输。
27.3、通过箱门、码放盒、升降板联动,能够在完成对储存箱内一层干饼的码放后,自动推动箱门和升降板上升一层干饼的高度,完成箱门的开启,还能够通过升降板对储存箱内干饼进行阻挡。
附图说明
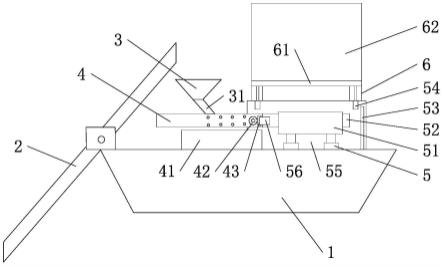
28.图1是本智慧城市河道水生植物清理系统的整体结构示意图;图2是本智慧城市河道水生植物清理系统的粉碎斗的截面示意图;图3是本智慧城市河道水生植物清理系统的压缩筒的俯视截面示意图;图4是本智慧城市河道水生植物清理系统的码放装置的俯视截面示意图;图5是本智慧城市河道水生植物清理系统的荆齿结构的侧视截面示意图。
29.附图标记说明:1、清理船;11、第三电磁铁;12、转动荆杆;2、输送带;3、粉碎斗;31、导向筒;32、粉碎辊;33、传动电机;34、绞龙;4、压缩筒;41、集水盒;42、伸缩气缸;43、阻挡板;44、压缩气缸;45、压缩头;46、切断刀;5、升降气缸;51、安装板;511、推动气缸;512、滑动板;513、导向杆;514、复位弹簧;515、第一电磁铁;516、顶出板;52、码放盒;53、齿条;54、支撑气缸;55、升降板;56、连动板;561、伸缩弹簧;562、叉杆;6、储存箱。
具体实施方式
30.以下将结合实施例对本发明的构思及产生的技术效果进行清楚、完整地描述,以充分地理解本发明的目的、特征和效果。
31.如图1、图2、图3所示,一种智慧城市河道水生植物清理系统,包括清理船1、输送带2、粉碎装置、压缩装置、码放装置、控制系统。粉碎装置包括粉碎斗3、五个粉碎辊32。粉碎斗3设置于清理船1上方,且与清理船1固定连接。粉碎辊32横向设置于粉碎斗3内,粉碎辊32的转轴贯穿粉碎斗3延伸至粉碎斗3外侧,粉碎辊32的转轴固定连接有粉碎电机,粉碎电机处于粉碎斗3外。压缩装置包括压缩筒4、压缩头45、压缩气缸44、阻挡板43、伸缩气缸42、若干过滤孔、绞龙34、传动电机33、导向筒31、集水盒41。导向筒31倾斜设置于粉碎斗3下方,导向筒31的上端与粉碎斗3的下端连通。传动电机33设置于粉碎斗3内,处于粉碎辊32下方,传动电机33与粉碎斗3固定,传动电机33的转轴轴线与导向筒31的轴线重合。绞龙34倾斜设置于粉碎斗3内,其下端延伸至导向筒31内,绞龙34的上端转轴与传动电机33的转轴固定连接。压缩筒4横向设置于导向筒31下方,压缩筒4的中部与导向筒31的下端连通,压缩筒4的轴线
与导向筒31的轴线相交。阻挡板43沿导向筒31的倾斜方向设置于导向筒31侧方,且处于压缩筒4侧方,阻挡板43贯穿压缩筒4延伸至压缩筒4内,用于将压缩筒4堵塞。伸缩气缸42设置于压缩筒4侧方,沿阻挡板43的滑动方向设置,且与压缩筒4固定连接,伸缩气缸42的伸缩端与阻挡板43连接。压缩头45滑动设置于压缩筒4内,处于阻挡板43的侧方,压缩头45与阻挡板43分别处于导向筒31和压缩筒4的连通口的两侧。压缩气缸44设置于压缩筒4内,与压缩筒4固定连接,且处于压缩头45远离阻挡板43的一侧,且沿压缩头45的移动方向设置,压缩气缸44的伸缩端与压缩头45连接。若干过滤孔设置于压缩筒4侧壁上,处于压缩头45与阻挡板43之间。集水盒41设置于若干过滤孔下方,集水盒41连通有排水管。输送带2倾斜安装于清理船1侧部,输送带2的上端处于粉碎斗3的正上方。码放装置与压缩装置连接,用于对经过压缩装置压缩后的干饼进行码放储存。控制系统与输送带2、粉碎装置、压缩装置、码放装置连接。
32.通过输送带2将河道中的水生植物持续输送到粉碎斗3中,同时控制系统控制粉碎电机启动,粉碎电机带动粉碎辊32转动,粉碎辊32对植物进行粉碎。控制系统控制传动电机33启动,传动电机33带动绞龙34转动,绞龙34带动粉碎斗3中经过粉碎的水生植物通过导向筒31进入压缩筒4内,然后控制压缩气缸44伸长,压缩气缸44带动压缩头45向阻挡板43方向移动,将压缩头45与阻挡板43之间的水生植物压缩成干饼,使水生植物中的水分从过滤孔流出到集水盒41中,之后通过排水管排入河道内。之后控制系统控制伸缩气缸42伸长,伸缩气缸42带动阻挡板43移动到压缩筒4外,然后控制压缩气缸44伸长,压缩气缸44带动压缩头45移动,将干饼推动到码放装置中进行码放储存。之后控制系统控制压缩气缸44收缩,压缩气缸44带动压缩头45移动到初始位置,然后控制伸缩气缸42收缩,伸缩气缸42带动阻挡板43移动到压缩筒4内,将压缩筒4堵塞。通过设置粉碎装置、压缩装置,能够去除水生植物中的水分,提高清理船1的单次打捞量,提高了清理船1对河道中水生植物的清理效率。
33.如图4所示,码放装置包括码放盒52、两个升降气缸5、储存箱6、两个推动气缸511、安装板51、压力感应器。压缩筒4的内部空腔为长方体。码放盒52的内部空腔为长方体,码放盒52的内部空腔的截面外形与压缩筒4内部空腔的截面外形相适应,码放盒52横向设置于清理船1上方,处于压缩筒4侧方,码放盒52与压缩筒4相互平行,码放盒52靠近压缩筒4的一端为开口,且与压缩筒4的一端紧贴并连通。升降气缸5竖向设置于清理船1顶部,且处于码放盒52的一侧。安装板51横向设置于升降气缸5上方,处于码放盒52靠近升降气缸5的一侧,且与两个升降气缸5的上部伸缩端固定连接,安装板51与码放盒52相互平行。推动气缸511横向设置于码放盒52靠近升降气缸5的一侧,且与安装板51固定连接,推动气缸511的伸缩杆与码放盒52固定连接,推动气缸511与码放盒52垂直。储存箱6设置于清理船1上方,处于码放盒52远离推动气缸511的一侧,储存箱6面向码放盒52的侧部设置有箱口,储存箱6的内部空腔的横向长度与码放盒52的横向长度相同。压力感应器设置于码放盒52面向压缩筒4的内侧面上。
34.压缩气缸44带动压缩头45移动到压缩筒4靠近码放盒52的端口处,将干饼推动到码放盒52内。当压力感应器被干饼触发后,即干饼将码放盒52装满后,控制系统通过升降气缸5控制码放盒52升降,通过推动气缸511控制码放盒52横向移动到储存箱6内,将码放盒52内的干饼在储存箱6内由下到上,由内到外依次进行有序的码放,使储存箱6能够储存更多的干饼,当储存箱6被装满后,清理船1将储存箱6卸下,并更换新的储存箱6。通过设置码放
装置,能够提高清理船1的单次打捞量,提高了清理船1对水生植物的清理效率,且通过储存箱6对干饼进行储存和打包更方便进行运输。设置码放盒52和压缩筒4的内部空腔为长发体,能够压缩出方型的干饼,在进行码放时更加稳定和紧密。
35.码放装置包括顶出装置、升降板55、联动装置、滑动槽。码放盒52面向储存箱6的侧部为开口。滑动槽竖向设置于清理船1顶部,处于储存箱6与码放盒52之间。升降板55竖向滑动设置于滑动槽内,处于储存箱6与码放盒52之间,且分别与储存箱6的箱口和码放盒52的开口紧贴,用于将码放盒52面向储存箱6的开口封闭。联动装置与升降板55连接,用于带动升降板55升降。顶出装置设置于码放盒52上,用于将码放盒52内的干饼顶出到储存箱6内。
36.控制系统通过升降气缸5控制码放盒52上升,使码放盒52与升降板55分离,之后控制系统通过推动气缸511控制码放盒52横向移动到储存箱6内,然后通过顶出装置将码放盒52内的干饼顶出到储存箱6中进行码放。之后控制系统通过升降气缸5、推动气缸511控制码放盒52移动到初始位置,使码放盒52与压缩筒4连通,使码放盒52面向储存箱6的开口被升降板55封闭。当储存箱6内的一层干饼被码放完成后,联动装置带动升降板55上升一层干饼的高度,将储存箱6内的干饼阻挡,防止储存箱6内的干饼漏出,之后控制系统通过升降气缸5、推动气缸511控制码放盒52移动到这一层干饼的上方进行码放。设置联动装置和升降板55,能够使升降板55随储存箱6内干饼的高度的增加而上升,防止储存箱6内的干饼从储存箱6箱口漏出。
37.顶出装置包括顶出板516、两个导向杆513、两个复位弹簧514、第一电磁铁515、滑动板512。顶出板516设置于码放盒52内,且与码放盒52面向储存箱6的内侧面紧贴。导向杆513横向设置于码放盒52远离储存箱6的一侧,导向杆513与推动气缸511的伸缩杆相互平行,导向杆513的一端贯穿码放盒52与顶出板516固定连接。滑动板512为铁磁性材料,设置于码放盒52远离储存箱6的一侧,滑动套设于两个推动气缸511的伸缩杆上,滑动板512与两个导向杆513固定连接。复位弹簧514套设于导向杆513上,处于滑动板512与码放盒52之间,复位弹簧514为压缩状态。第一电磁铁515设置于码放盒52与滑动板512之间,且与码放盒52固定。
38.当顶出装置启动时,控制系统控制第一电磁铁515启动,第一电磁铁515吸引滑动板512移动,滑动板512通过导向杆513带动顶出板516移动,将码放盒52内的干饼顶出到储存箱6内。之后控制系统控制第一电磁铁515关闭,在复位弹簧514的作用下滑动板512移动到初始位置,滑动板512通过导向杆513带动顶出板516移动到初始位置。设置顶出装置,能够自动将码放盒52内的全部干饼同步顶出,将码放盒52内的干饼码放到储存箱6内。
39.码放装置包括三个叉杆562、连动板56、三个伸缩弹簧561。阻挡板43处于压缩筒4远离储存箱6的一侧,阻挡板43的滑动方向与顶出板516的移动方向平行。叉杆562设置于码放盒52远离储存箱6的一侧,且贯穿码放盒52靠近压缩筒4的一端和顶出板516延伸至码放盒52内,叉杆562与顶出板516的移动方向平行。连动板56竖向设置于叉杆562和阻挡板43远离储存箱6的一侧,连动板56与三个叉杆562固定连接。伸缩弹簧561套设于叉杆562上,处于连动板56与码放盒52之间,伸缩弹簧561的两端分别与连动板56和码放盒52连接。
40.在压缩气缸44带动压缩头45移动将干饼推动到码放盒52中时,控制系统控制伸缩气缸42伸长带动阻挡板43向外侧移动,阻挡板43推动连动板56向外侧移动,连动板56带动叉杆562向外侧移动。在压缩气缸44带动压缩头45移动将干饼推动到码放盒52中后,控制系
统控制伸缩气缸42收缩带动阻挡板43将压缩筒4堵塞,伸缩弹簧561带动连动板56、叉杆562向内侧移动,使叉杆562插入码放盒52中靠近压缩筒4的一端的干饼进行固定,防止干饼漏出。当控制系统控制码放盒52移动进行码放时,叉杆562会插入码放盒52中靠近压缩筒4的一端的干饼进行固定,防止干饼漏出。设置与阻挡板43连动的叉杆562,能够自动将码放盒52中靠近压缩筒4的一端的干饼固定,防止干饼在码放的移动过程中从码放盒52中漏出。
41.码放装置包括箱门、两个第一滑道、两个第一滑块、辅助板。箱门设置于储存箱6侧方,将储存箱6的箱口封闭,箱门设置于升降板55上方。两个第一滑道为t型滑道,竖向设置于储存箱6靠近箱门的侧面上,分别处于储存箱6的箱口的两侧。第一滑块滑动设置于第一滑道内,且与箱门固定连接。辅助板为铁磁性材料,横向设置于箱门外侧,且与箱门的底部固定连接,辅助板的底面与箱门的底面处于同一平面内。联动装置包括荆齿结构、两个支撑气缸54。荆齿结构与升降板55连接,用于使升降板55仅能够上升。两个支撑气缸54竖向固定于升降板55侧面上,且分别处于储存箱6的箱口的两侧,支撑气缸54的上部伸缩端与辅助板相抵,支撑气缸54的上部伸缩端安装有第二电磁铁。
42.在将清理船1上的储存箱6更换后,控制系统控制支撑气缸54伸长,支撑气缸54推动箱门向上移动,使升降板55与箱门之间的距离大于码放盒52的高度。同时控制系统控制第二电磁铁启动,第二电磁铁将辅助板吸附。当控制系统通过升降气缸5、推动气缸511带动码放盒52进行码放时,码放盒52会推动辅助板向上移动,辅助板带动箱门向上移动到对应位置,并通过支撑气缸54带动升降板55同步上升,然后升降板55在荆齿结构的作用下固定,并通过支撑气缸54支撑箱门。每当完成对储存箱6内一层干饼的码放后,码放盒52会推动箱门、升降板55向上移动一层干饼的高度,之后升降板55在荆齿结构的作用下固定,并通过支撑气缸54支撑箱门。通过设置荆齿结构、支撑气缸54、第二电磁铁,能够在完成对储存箱6内一层干饼的码放后,自动推动箱门和升降板55上升一层干饼的高度,完成箱门的开启,还能够通过升降板55对储存箱6内干饼进行阻挡。设置辅助板,使工作人员在打开储存箱6时能够通过辅助板将箱门滑动打开,更加方便。
43.如图5所示,荆齿结构包括齿条53、转动荆杆12、扭簧、第三电磁铁11、安装槽。齿条53竖向设置于升降板55的侧面上。安装槽设置于滑动槽内壁上,且与齿条53相对设置。转动荆杆12为铁磁性材料,倾斜设置于安装槽内,其上端与齿条53啮合,下端通过转轴与安装槽内壁转动连接,转动荆杆12的转动轴线横向设置。扭簧套设于转动荆杆12的转轴上,其两端分别与安装槽内壁和转动荆杆12连接。第三电磁铁11设置于安装槽内,处于转动荆杆12远离齿条53的一侧,用于吸引转动荆杆12转动与齿条53分离。
44.当升降板55带动齿条53上升时,齿条53会推动转动荆杆12转动,使转动荆杆12与齿条53产生相对移动,之后转动荆杆12在扭簧作用下转动与齿条53啮合,将升降板55固定。当储存箱6被装满后,控制系统控制支撑气缸54收缩,使箱门与升降板55相接,然后控制第三电磁铁11启动,第三电磁铁11吸引转动荆杆12转动,使转动荆杆12与齿条53分离,之后升降板55和箱门在重力作用下下降,使升降板55下降到初始位置,使箱门下降将储存箱6的箱口封闭,然后控制系统控制第二电磁铁、第三电磁铁11关闭,使支撑气缸54与辅助板分离,之后对储存箱6进行更换。设置可控制的荆齿结构,能够在储存箱6被装满后,自动将箱门关闭。
45.压缩装置包括切断刀46。压缩头45的长度大于阻挡板43与导向筒31和压缩筒4的
连通口之间的距离。切断刀46为环状,设置于压缩头45靠近阻挡板43的侧面上,切断刀46的刀口朝向阻挡板43,切断刀46的外侧面与压缩筒4的内侧面紧贴。
46.当压缩头45带动切断刀46移动时,能够将过滤孔以及导向筒31和压缩筒4的连通口处的植物切断,防止水生植物将压缩头45卡死。
47.一种智慧城市河道水生植物清理系统的工作方法,在将清理船1上的储存箱6更换后,控制系统控制支撑气缸54伸长,支撑气缸54推动箱门向上移动,使升降板55与箱门之间的距离大于码放盒52的高度。同时控制系统控制第二电磁铁启动,第二电磁铁将辅助板吸附。当控制系统通过升降气缸5、推动气缸511带动码放盒52进行码放时,码放盒52会推动辅助板向上移动,辅助板带动箱门向上移动到对应位置,并通过支撑气缸54带动升降板55同步上升,然后升降板55在荆齿结构的作用下固定,并通过支撑气缸54支撑箱门。
48.将箱门、码放盒52、升降板55联动,能够自动开启箱门,还能够通过升降板55对储存箱6内的干饼进行阻挡。
49.当储存箱6被装满后,控制系统控制支撑气缸54收缩,使箱门与升降板55相接,然后控制第三电磁铁11启动,第三电磁铁11吸引转动荆杆12转动,使转动荆杆12与齿条53分离,之后升降板55和箱门在重力作用下下降,使升降板55下降到初始位置,使箱门下降将储存箱6的箱口封闭,然后控制系统控制第二电磁铁、第三电磁铁11关闭,使支撑气缸54与辅助板分离,之后对储存箱6进行更换。
50.通过可控制的荆齿结构,能够在储存箱6被装满后,自动将箱门关闭,还能防止储存箱6内的干饼在箱门关闭过程中漏出。
51.上述实施例仅是本发明的一部分实施例,而不是全部实施例,基于本发明的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1