一种动态船舶预警提示系统的制作方法
1.本发明涉及船舶技术领域,特别涉及一种动态船舶预警提示系统。
背景技术:
2.现有船舶在海上或河道内航行时,经常会碰到复杂地形,有些航区吃水变化比较大,吃水变化大除了影响船舶推进器如船用螺旋桨的动作外,还会因为吃水深度的变化造成船舶碰到水底礁石或者其他障碍物的情况。现有技术中,针对上述情况只考虑了吃水变化对于船舶推进器的影响,如专利文献1其公开了一种船舶推进器,针对船舶吃水深度变化影响推进器推力的问题,其设计了一种可升降及可旋转的船舶推进器,通过压力传感器检测水压的变化,动态的调整船舶推进器的高度,避免船舶推进器遇到障碍,使得船舶推进器能够得到最大的推进力,保证船舶的正常行驶,而且其船舶推进器也可以通过电机控制来进行旋转从而能够改变船舶的航向;再如专利文献2其也公开了一种船舶推进器,其通过设置浮板结构实现了对船舶推进器高度的自动调节,相比于专利文献1其省去了压力传感器,通过设置的浮板结构实现了船舶推进器高度的自动调节;以上现有技术,虽然都考虑到了船舶在吃水深度变化时受到的影响,但都只是重点考虑对船舶推进器的影响,未考虑到吃水深度变化对于船舶行驶的影响,在船舶由于吃水深度变化而下沉的过程中,船体底部有可能会触碰到水底的障碍物,从而影响到船舶的正常运行,同时,现有技术中对于船舶在吃水深度变化时并不能自动调整船舶的浮力,同时在碰撞到障碍物后也不能够进行主动调整,从而保证船舶航行的安全,同时,对于船舶危险及船舶调整动作也不能够进行实时预警,进一步降低船舶行驶安全性。[专利文献1]cn109018283a;
[0003]
[专利文献2]cn113371165a。
[0004]
综上所述,现有技术中,对于海上或河道航行的船舶,虽然考虑了吃水深度变化对船舶的影响,但都停留在船舶推进器上,未考虑船舶在吃水深度变化而下沉的过程中,船体底部会碰到水下障碍物的情况,为此,本发明提供了一种能够适应吃水深度变化、在船体底部碰到障碍物可能会影响船体正常航行时,自动进行船体航行方向的调整,同时,也能够自动的调整船体浮力,使得船体能够更加轻松避过障碍物,且能够进行预警提示的动态船舶预警提示系统。
技术实现要素:
[0005]
为了克服现有船舶遇预警提示系统的不足,本发明提供了一种技术方案,一种动态船舶预警提示系统,其包括:设置于船体内的控制器和报警单元,所述船体包括倾斜段和垂直段,垂直段位于倾斜段的下端,在垂直段上滑动套设有滑动旋转环体,滑动旋转环体上固定设置有推进器,所述滑动旋转环体包括内环段和外环段,所述外环段能够相对内环段转动,所述外环段为可变形环体,所述推进器固定设置于外环段上,所述内环段内设置有蓄能齿轮组,在船体的垂直段的周向上转动设置有若干旋转板组,在旋转板组和垂直段之间设置有膨胀气囊,所述内环段内设置有充气组件,在滑动旋转环体碰到障碍物后,所述障碍
物使得外环段相对内环段进行转动,所述控制器向报警单元发送报警信号,所述报警单元进行报警,同时,所述蓄能齿轮组内的蓄能弹簧发生变形进行蓄能,所述推进器相对船体偏转一定角度,所述外环段驱动所述充气组件向膨胀气囊内充入气体,膨胀气囊带动旋转板组进行转动,最终使得旋转板组展开,展开的旋转板组驱动内环段向上滑动,偏转的推进器以及上滑的滑动旋转环体使得船舶脱离障碍物,所述蓄能弹簧释放能量,使得外环段反向旋转复位,推进器从偏转位置复位,继续推进船舶在水流内航行,同时控制器控制报警单元停止报警。
[0006]
优选地,所述蓄能齿轮组包括旋转齿轮、齿轮轴和蓄能弹簧,所述齿轮轴位于所述旋转齿轮的上下两端,且所述齿轮轴转动设置于所述内环段内,所述蓄能弹簧位于旋转齿轮的一侧,在旋转齿轮的上端设置有弹簧固定孔一,在内环段的一侧设置有弹簧固定孔二,蓄能弹簧的两端分别通过弹簧固定孔一和弹簧固定孔二连接于所述旋转齿轮和所述内环段。
[0007]
优选地,所述外环段的内侧设置有齿形槽,在齿形槽的侧面设置有齿条,所述旋转齿轮伸入所述齿形槽内,且所述旋转齿轮与所述齿条啮合。
[0008]
优选地,所述旋转板组包括转动轴、竖板和横板,所述竖板的上端通过转动轴转动设置于船体的垂直段,所述横板固定设置于竖板的下端,且所述横板抵靠于所述内环段的下端。
[0009]
优选地,所述齿形槽内与所述充气组件相对应的位置处设置有驱动凸块,所述充气组件包括充气泵、气管一、气管二和气管接头组件,所述充气泵固定设置于内环段内侧,所述气管一的两端分别连接气泵和气管接头组件的一端,所述气管二的两端分别连接气管接头组件的另一端以及膨胀气囊,所述气管连头组件固定设置于内环段内侧,其包括接头管体、阀板、接触杆和复位弹簧,所述阀板竖直滑动设置于所述接头管体内,所述接触杆固定设置于所述阀板的上端,所述复位弹簧底端固定设置于所述接头管体内,且复位弹簧顶端固定设置于所述阀板的底端,所述复位弹簧驱动所述阀板向上滑动,所述接触杆的顶端抵触所述驱动凸块。
[0010]
优选地,所述驱动凸块为圆弧凸台结构,中间最厚、两边逐渐变薄,接触杆位于驱动凸块中间位置时,所述阀板能够封闭所述接头管体,接触杆在位于驱动凸块的两端时,阀板向上滑动,且接头管体内的开度最大。
[0011]
优选地,在充气组件向膨胀气囊内充气时,所述膨胀气囊开始膨胀,驱动所述旋转板组绕着转动轴转动,使得旋转板组绕着转动轴展开,展开的旋转板组驱动所述滑动旋转环体向上滑动,位于船体的倾斜段和垂直段的交界处。
[0012]
优选地,为了能够测量出船舶的深度,在船体垂直段的底端或者推进器上设置有水压传感器,所述水压传感器能够将测量到的水压数据传递给控制器,然后将水压数据通过计算后得出水深数据。
[0013]
优选地,在充气组件内还设置有气管三,所述气管三一端连接于充气泵的另一端,所述气管三的另一端连接所述膨胀气囊,在所述气管三上设置有电磁阀,所述电磁阀能够打开或关闭所述气管三,所述电磁阀的动作由所述控制器进行控制。
[0014]
优选地,所述接触杆为伸缩杆,所述控制器能够控制所述伸缩杆的伸缩量,所述复位弹簧的下侧固定于压板,所述压板和所述接头管体之间设置有压力传感器,所述伸缩杆
的伸缩量能够通过压力传感器感测的压力大小进行动态调节,最终使得所述阀板处于封闭所述接头管体的状态,从而保证膨胀气囊内的气压过高。
[0015]
本发明的有益效果为:
[0016]
1)、本发明的动态船舶预警提示系统,考虑到船舶由于吃水深度变化而下沉的过程中有可能会触碰到水底障碍物如礁石等的情况,在船舶触碰到障碍物时能够进行报警,且能够自动的改变船舶推进器的角度,使得船舶推进器能够帮助船舶进行转弯,使得船舶远离障碍物,同时,还能够对船舶底部的膨胀气囊进行充气,充气的膨胀气囊又会驱动船舶推进器上移,在改变船舶浮力的同时,也使得船舶推进器能够位于合适的高度,使得船舶能够获得最佳的驱动力;
[0017]
2)、本发明的动态船舶预警提示系统中的滑动旋转环体包括了内环段和外环段,外环段能够相对内环段转动,外环段上固定设置有船舶推进器,内环段内设置有蓄能齿轮组,在船舶碰撞到障碍物时,障碍物会驱动外环段相对于内环段转动,而外环段上的船舶推进器随着外环段进行转动,最后使得船舶推进器转动一定角度驱动船舶进行转向,而在脱离障碍物后,吸收于蓄能齿轮组上的能量能够得到释放,最终使得船舶推进器复位,继续推动船舶进行航行;
[0018]
3)、进一步地,本发明的船体包括倾斜段和垂直段,滑动旋转环体滑动套设于垂直段,且垂直段外侧设置有若干旋转板组,旋转板组与垂直段内分布有膨胀气囊,膨胀气囊能够驱动旋转板组进行翻转,翻转后的旋转板组则会驱动滑动旋转环体滑动上升,所述膨胀气囊的膨胀由内环段内的充气组件进行充气,外环段上设置有驱动凸块,在障碍物驱动外环段旋转时,驱动凸块能够控制充气泵出气的气管开口的大小,在外环段相对内环段转动时,气管的开口打开,气泵内的气体充入膨胀气囊内,使得旋转板组展开,推动滑动旋转环体上滑,同时,船体的浮力也会变大,也可以在一定程度上改善船舶的下沉量;
[0019]
4)、进一步地,为了使得滑动旋转体在没有碰到障碍物时也能够进行动作,使得充气泵还设置有气管三,且在气管三上设置有能够由控制器控制启闭的电磁阀,在水压传感器检测到船舶深度变深后,启动电磁阀开启,使得气体可以从气管三内充入膨胀气囊,膨胀气囊能够驱动旋转板组进行翻转,翻转后的旋转板组则会驱动滑动旋转环体滑动上升;
[0020]
5)、进一步地,为了能够智能的控制膨胀气囊内的充气量,使得与驱动凸块接触的接触杆为控制器能够控制的伸缩杆,在膨胀气囊内气体太多后,可以控制伸缩杆伸出相应距离,以补偿凸形驱动凸块的位移量,从而使得阀板处于完全闭合状态,同时,在膨胀气囊内还设置有排气阀,在不需要如此多气体,且需要调整滑动旋转环体下滑时,处于打开状态,使得膨胀气囊收缩,最后使得若干旋转板组又处于收缩状态,推进器下移;
[0021]
6)、进一步地,在外环段还处于相对内环段转动状态时,为了保证膨胀气囊内的充气量在达到一定压力时停止充气,同时也是为了避免重复开闭充气泵对泵体寿命及泵体响应速度的影响,使得接触杆19为控制器可控制伸缩的伸缩杆,如可以为电动伸缩杆或者液压伸缩杆,同时使得复位弹簧20下侧设置有压力传感器,控制器实时检测压力传感器的压力值,在压力值变大时控制伸缩杆缩短一定长度,在压力值变小时控制伸缩杆伸长一定长度,同时为了能够更加精确的进行充气控制,也可以在外环段上设置一旋转角度传感器,在外环段相对内环段旋转一定角度时,通过该旋转角度结合驱动凸块的外形,计算出伸缩杆伸长或缩短的数值,从而来使得外环段还相对内环段转动、且不关闭充气泵的状态下,膨胀
气囊内的气体保持在一定数值范围内。
附图说明
[0022]
图1为本发明的船舶航行示意图;
[0023]
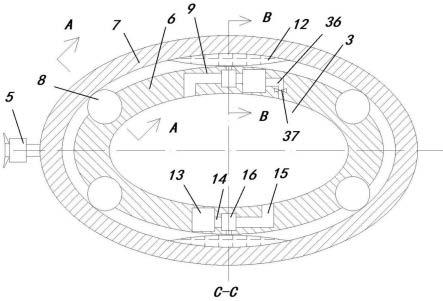
图2为图1的c-c剖视图;
[0024]
图3为图2的a-a剖视图;
[0025]
图4为图2的b-b剖视图;
[0026]
图5为滑动旋转环体自动调整举升后的船舶航行示意图;
[0027]
图6为本发明的动态船舶提示系统控制结构示意图;
[0028]
图7为船舶碰到障碍后动作示意图。
[0029]
标号说明
[0030]
1、船体;2、水流;3、垂直段;4、滑动旋转环体;5、推进器;6、内环段;7、外环段;8、蓄能齿轮组;9、充气组件;10、旋转板组;11、膨胀气囊;12、驱动凸块;13、充气泵;14、气管一;15、气管二;16、气管接头组件;17、接头管体;18、阀板;19、接触杆;20、复位弹簧;21、弹簧槽;22、旋转齿轮;23、齿轮轴;24、蓄能弹簧;25、弹簧固定孔一;26、弹簧固定孔二;27、压力传感器;28、水压传感器;29、竖板;30、横板;31、转动轴;32、齿形槽;33、齿条;34、压板;35、倾斜段;36、气管三;37、电磁阀。
具体实施方式
[0031]
下面结合实施例对本发明作进一步的说明,但不以任何方式对本发明加以限制,基于本发明教导所作的任何变换或替换,均属于本发明的保护范围。
[0032]
一种动态船舶预警提示系统,如图1-7所示,其包括:设置于船体1内的控制器和报警单元,所述船体1包括倾斜段35和垂直段3,垂直段3位于倾斜段35的下端,在垂直段3上滑动套设有滑动旋转环体4,滑动旋转环体4上固定设置有推进器5,所述滑动旋转环体4包括内环段6和外环段7,所述外环段7能够相对内环段6转动,所述外环段7为可变形环体,所述推进器5固定设置于外环段7上,所述内环段6内设置有蓄能齿轮组8,在船体1的垂直段3的周向上转动设置有若干旋转板组10,在旋转板组10和垂直段3之间设置有膨胀气囊11,所述内环段6内设置有充气组件9,在滑动旋转环体4碰到障碍物38后,所述障碍物38使得外环段7相对内环段6进行转动,所述控制器向报警单元发送报警信号,所述报警单元进行报警,同时,所述蓄能齿轮组8内的蓄能弹簧24发生变形进行蓄能,所述推进器5相对船体1偏转一定角度,同时所述充气组件9向膨胀气囊11内充入气体,膨胀气囊11带动旋转板组10进行转动,最终使得旋转板组10展开,展开的旋转板组10驱动内环段6向上滑动,偏转的推进器5以及上滑的滑动旋转环体4使得船舶脱离障碍物38,所述蓄能弹簧24释放能量,使得外环段7反向旋转复位,推进器5复位,继续推进船舶在水流2内航行,同时控制器控制报警单元停止报警。
[0033]
优选地,如图2-3所示,所述蓄能齿轮组8包括旋转齿轮22、齿轮轴23和蓄能弹簧24,所述齿轮轴23位于所述旋转齿轮22的上下两端,且所述齿轮轴23转动设置于所述内环段6内,所述蓄能弹簧24位于旋转齿轮22的一侧,在旋转齿轮22的上端设置有弹簧固定孔一25,在内环段6的一侧设置有弹簧固定孔二26,蓄能弹簧24的两端分别通过弹簧固定孔一25
和弹簧固定孔二26连接于所述旋转齿轮22和所述内环段6。
[0034]
优选地,所述外环段7的内侧设置有齿形槽32,在齿形槽32的侧面设置有齿条33,所述旋转齿轮22伸入所述齿形槽32内,且所述旋转齿轮22与所述齿条33啮合。
[0035]
优选地,为了使得外环段7能够平稳的绕内环段6转动,使得内环段内还包括若干导向滚轮,所述导向滚轮伸入所述齿形槽32内,从而保证外环段绕内环段进行稳固转动。
[0036]
优选地,所述蓄能齿轮组8包括若干个,且绕内环段6均匀布置,如可以为4、8、12甚至更多个。
[0037]
优选地,所述旋转板组10包括转动轴31、竖板29和横板30,所述竖板29的上端通过转动轴31转动设置与船体1的垂直段3,所述横板30固定设置于竖板29的下端,且所述横板30抵靠于所述内环段6的下端。
[0038]
优选地,所述齿形槽32内与所述充气组件9相对应的位置处设置有驱动凸块12,如图2、4所示,所述充气组件9包括充气泵13、气管一14、气管二15和气管接头组件16,所述充气泵13固定设置于内环段6内侧,所述气管一14的两端分别连接气泵13和气管接头组件16的一端,所述气管二15的两端分别连接气管接头组件16的另一端以及膨胀气囊11,所述气管连头组件16固定设置于内环段6内侧,其包括接头管体17、阀板18、接触杆19和复位弹簧20,所述阀板18竖直滑动设置于所述接头管体17内,所述接触杆19固定设置于所述阀板18的上端,所述复位弹簧底端固定设置于所述接头管体17内,且复位弹簧顶端固定设置于所述阀板18的底端,所述复位弹簧20驱动所述阀板18向上滑动,所述接触杆19的顶端抵触所述驱动凸块12。
[0039]
优选地,所述驱动凸块12为圆弧凸台结构,中间最厚、两边逐渐变薄,接触杆19位于驱动凸块12中间位置时,所述阀板18能够封闭所述接头管体17,接触杆19在位于驱动凸块12的两端时,阀板18向上滑动,且接头管体17内的开度最大。
[0040]
优选地,所述充气组件的个数为若干个,如可以为2、4、6、8个甚至更多。
[0041]
优选地,如图5所示,在充气组件9向膨胀气囊11内充气时,所述膨胀气囊11开始膨胀,驱动所述旋转板组10绕着转动轴31转动,使得旋转板组10绕着转动轴31展开,展开的旋转板组10驱动所述滑动旋转环体4向上滑动,位于船体1的倾斜段35和垂直段3的交界处。
[0042]
优选地,为了能够测量出船舶的深度,在船体1垂直段3的底端或者推进器5上设置有水压传感器28,所述水压传感器28能够将测量到的水压数据传递给控制器,然后将水压数据通过计算后得出水深数据。
[0043]
优选地,为了能够使得滑动旋转环体4在未受到障碍物38的碰撞时仍然能够动作,在充气组件9内还设置有气管三36,所述气管三36一端连接于充气泵13的另一端,所述气管三36的另一端连接所述膨胀气囊11,在所述气管三36上设置有电磁阀37,所述电磁阀37能够打开或关闭所述气管三36,所述电磁阀37的动作由所述控制器进行控制。
[0044]
优选地,为了能够使得船舶能够适应吃水深度变浅,在膨胀气囊11上还设置有排气阀,所述排气阀由所述控制器进行控制开闭,在水压传感器28检测到吃水深度又变浅后,使得所述排气阀打开,所述膨胀气囊11放气,所述旋转板组10收缩,所述滑动旋转环体4沿着所述垂直段3竖直向下滑动,使得所述推进器5降低。
[0045]
优选地,为了保证膨胀气囊11内的气压不会过高,使得所述接触杆19为伸缩杆,所述控制器能够控制所述伸缩杆19的伸缩量,所述复位弹簧20的下侧固定于压板34,所述压
板34和所述接头管体17之间设置有压力传感器27,所述伸缩杆的伸缩量能够通过压力传感器27感测的压力大小进行动态调节,最终使得所述阀板18处于封闭所述接头管体17的状态,从而保证膨胀气囊11内的气压过高。
[0046]
优选地,为了避免所述阀板18在接头管体17内滑动时,气体发生泄漏,所述复位弹簧20位于弹簧槽21内,所述弹簧槽21设置于接头管体17内侧,所述弹簧槽21的厚度与所述阀板18的厚度相同,所述接头管体17内设置有宽度与所述阀板18的厚度相同的滑动槽。
[0047]
优选地,所述滑动旋转环体4碰到障碍物38的检测可以通过在外环段7的外侧设置碰撞传感器进行检测,或者可以通过检测所述外环段7相对所述内环段6的转动进行检测,如可以通过在旋转齿轮22上设置角度传感器进行感测,然后将检测结果发送给控制器。
[0048]
优选地,所述报警单元包括报警器,所述报警器可以输出声音或者输出灯光报警信息,还可以输出文字信息进行报警,只要能够进行报警即可,为本领域的公知常识,并不是本技术的重点,故不再赘述。
[0049]
优选地,所述外环段7的可变形通过使得外环段7的材质为可变形材料制成来实现,如所述外环段7可以选择为pvc、橡胶或聚氨酯等材料制成;为了保证外环段7的强度,也可以采用内部有钢缆或钢丝等内芯,外部包裹pvc\橡胶或聚氨酯等材料制成;也可以使得外环段7为若干小段缓冲单元之间通过铰接结构形成的链状结构,所述缓冲单元可以通过在钢板的外侧固定pvc、橡胶或聚氨酯等组成,然后使得钢板之间相互铰接,最后组成链状环体结构。
[0050]
优选地,所述内环段6由不可变形的材料制成,如由钢板等焊接而成,其只能相对所述垂直段3上下升降滑动,不能够围绕所述垂直段3进行转动。
[0051]
优选地,所述推进器5为推进螺旋桨,其通过固定架设置于所述外环段7上,推进螺旋浆为本领域的公知常识,并不是本技术的重点,故不再赘述,如可以为电机带动螺旋叶片转动的结构构成推进螺旋浆。
[0052]
优选地,所述控制器可以选择为plc或者中央处理器,具体控制器和各传感单元、阀元件的连接、通讯关系如图6所示,至于具体的信号通讯方式、具体通讯协议等,为本领域公知常识,不是本技术重点,故不再赘述。
[0053]
优选地,所述船体上设置有供电单元(图未示意),以向各组件提供电源,具体的供电单元如可以为蓄电池、太阳能电池,或者由船舶电力网进行供电,为本领域公知常识,不是本技术重点,故不再赘述。
[0054]
为了使得本领域技术人员能够详细了解本技术,现将本技术的动态船舶预警提示系统的工作过程结合附图7说明如下:在船体1向右行驶的过程中,如果船体经过了吃水深度发生变化的区域,吃水深度变深,可能会使得船体底部与障碍物38碰撞的机会变大,假设障碍物38位于船体前进方向的左侧,外环段7与障碍物38发生碰撞,障碍物38会使得外环段7产生一相对所述内环段6逆时针方向的旋转,从而使得位于外环段7上的推进器5相对所述船体1也发生一逆时针方向的旋转,产生一偏转角度,偏转的推进器5使得船体能够顺时针进行转动,从而能够使得船体脱离所述障碍物,所述内环段6内的蓄能齿轮组8内的蓄能弹簧发生变形,存储一定的能量,同时外环段7内的驱动凸块12也发生位移,复位弹簧20驱动接触杆19向上滑动,所述阀板18使得接头管体17处于打开状态,充气泵13内的气体通过气管一、气管二充入膨胀气囊11内,膨胀气囊11使得旋转板组10处于展开状态,从而使得与障
碍物38接触的外环段7向上滑动,向上滑动的外环段7以及有一定偏转角度的推进器5共同作用,使得外环段7脱离所述障碍物,脱离障碍物38后的外环段可以自由转动,此时,蓄能弹簧释放能量,使得外环段又快速逆时针旋转回复原来位置,最后使得推进器5也恢复原样,继续推进船体在水流内航行。在整个与障碍物38碰撞的过程中,控制器通过外环段7上设置的碰撞传感器或者旋转齿轮22上设置的角度传感器检测到障碍物的碰撞信息,然后通过报警单元进行报警,直至船体脱离障碍物38进行正常航行。为了使得船舶预警提示系统在未碰到障碍物38时也能够进行正常的滑动旋转环体4的升降调节,使得在船体1的垂直段3的下侧或者时推进器5上设置水压传感器28,控制器在水压传感器28判断船体吃水深度发生变化由浅变深超过一定数值,该具体数值根据船舶的吨位不同数值会发生一定变化,一般为0.3-1米左右,所述控制器控制电磁阀处于打开状态,气体由充气泵13充入膨胀气囊11内,从而驱动旋转板组10展开,驱动滑动旋转环体4向上滑动处于倾斜段35与垂直段3交界处,在膨胀气囊11内可以设置压力传感器,在检测到气压达到一定数值时,使得控制器控制电磁阀处于关闭状态,从而能够自动适应吃水深度变深;后续在水压传感器28检测到船体炊熟深度由深变浅后,控制器控制膨胀气囊11上的排气阀处于打开状态,排出膨胀气囊11内的气体,所述滑动旋转环体4的重力使得所述旋转板组10处于收缩状态,滑动旋转环体4向下滑动,从而使得推进器5的高度变低,适应不同水深的变化来驱动船体进行安全航行。
[0055]
虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可利用上述揭示的技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1