同轴定位组装结构及推进器的制作方法
1.本技术涉及船舶技术领域,具体涉及一种同轴定位组装结构及推进器。
背景技术:
2.现代的船舶使用原动机等配合沉没于水下的螺旋桨以推动电动竹筏。由于船舶的推进器中的原动机的体积较大,且其内部设计不允许有水进入,所以这种推进方式需要将原动机布置于船舶上。因此,推进器需要一种将船舶上的原动机的动力输出传递到水面下螺旋桨的装置。
3.目前常见的推进器使用一种弯管的机架将原动机通过传动轴伸入水面下连接螺旋桨进行推进,原动机通过原动机的底板与机架的弯管底面连接。由于弯管的制作精度较低,其底板相对传动轴会有较大的尺寸公差和形位公差,导致原动机安装到机架上以后会产生较大的同轴度误差,导致噪音变大、原动机的输出轴和传动轴寿命降低等问题。
技术实现要素:
4.本技术提出了一种同轴定位组装结构及推进器,用以解决上述电动船舶推进器的原动机同轴误差度较大且噪音变大的问题。
5.为解决上述技术问题,本技术采用的一个技术方案是:提供一种同轴定位组装结构,该同轴定位组装结构包括:
6.机架;固定板,固定设置于机架上,固定板上设有第一定位部;驱动机构,设置于机架上,与固定板相互配合定位;传动轴,位于固定板背离驱动机构的一侧,与机架连接,传动轴的一端与第一定位部相互配合定位,并与驱动机构的输出轴固定连接;悬置件,用于减少驱动机构传递到机架的振动。
7.为解决上述技术问题,本技术采用的另一个技术方案是:提供一种推进器,该推进器包括螺旋桨及上述的同轴定位组装结构,传动轴的另一端与螺旋桨连接。
8.本技术的有益效果是:区别于现有技术的情况,本技术的同轴定位组装结构通过设置固定板,将驱动机构及传动轴分别设置于固定板的两侧,驱动机构与固定板相互配合定位,在固定板上设有第一定位部,传动轴通过第一定位部与驱动机构的输出轴固定连接,能够提高驱动机构的输出轴与传动轴的同轴度,其次,本技术的同轴定位组装结构还设置了悬置件,悬置件能够减小驱动机构传递到机架的振动,减小噪声,增大推进器的使用寿命,降低成本。
附图说明
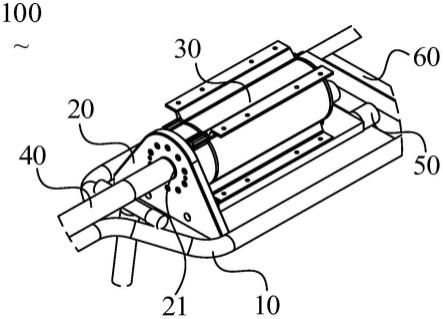
9.图1是本技术同轴定位组装结构第一实施例的结构示意图;
10.图2是本技术传动轴一实施例的侧视图;
11.图3是本技术传动轴另一实施例的结构示意图;
12.图4是本技术固定板一实施例的结构示意图;
13.图5是本技术同轴定位组装结构第二实施例的结构示意图;
14.图6是本技术原动机一实施例结构示意图;
15.图7是本技术同轴定位组装结构第三实施例的结构示意图;
16.图8是本技术推进器一实施例的结构示意图。
具体实施方式
17.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
18.现有技术中,一种船舶如电动竹筏,其原动机的底板上一般设置有腰型孔,通过螺钉穿过腰型孔与机架的弯管底面连接,传动轴安装于机架上,由于原动机的底板面上为腰型孔,在安装时,传动轴与原动机的输出轴连接,安装时的同轴度误差较大。同轴度误差较大,会使得原动机输出轴与传动轴的连接出现偏心。在原动机转动时,由于偏心,会导致原动机的输出轴与传动轴之间的一些位置的受力较大,噪声变大,原动机的输出轴和传动轴之间的损耗会更大,使得原动机的输出轴和传动轴的寿命降低,更换频率变高,且更换成本也变高。
19.为了解决原动机的输出轴和传动轴之间的损耗变大及噪声过大的问题,本技术首先提出一种同轴定位组装结构,解决上述问题。请参阅图1,图1是本技术同轴定位组装结构第一实施例的结构示意图,本实施例同轴定位组装结构100包括:机架10、固定板20、驱动机构30、传动轴40及悬置件50。
20.固定板20固定设置于机架10上,固定板20上设有第一定位部21;驱动机构30设置于机架10上,与固定板20相互配合定位;传动轴40位于固定板20背离驱动机构30的一侧,与机架10连接,传动轴40的一端与第一定位部21相互配合定位,并与驱动机构30的输出轴固定连接;悬置件50用于减少驱动机构30传递到机架10的振动。
21.请参阅图1,机架10可以为弯管机架,机架10由若干弯管焊接形成,机架10的弯管在中心形成一个容置空间,固定板20垂直固定安装于机架10,且固定板20部分卡接或者焊接于容置空间内,驱动机构30位于固定板20背离传动轴40的一侧,且驱动机构30的底座部分设置于容置空间内,驱动机构30的输出轴部分设置于容置空间之上。
22.本实施例中的机架10的弯管设置不仅可以保证驱动机构30有足够的空间进行安装,还可以避免阻碍驱动机构30的输出轴将转动扭矩传动到传动轴40,也能够避免驱动机构30的输出轴、传动轴40与机架之间的运动干涉。
23.固定板20上设有第一定位部21,第一定位部21设置于固定板20与驱动机构30输出轴对应的位置上。传动轴40位于固定板20背离驱动机构30的一侧,与机架10连接,固定安装设置于机架10的弯管上方,且一端设置于第一定位部21内,传动轴40通过第一定位部21与驱动机构30的输出轴固定连接,另一端可以与螺旋桨连接,将驱动机构30的动力传输至与传动轴40连接的螺旋桨。
24.驱动机构30在与机架10连接时,通过悬置件50减少驱动机构30自身传递至机架10的振动。
25.区别于现有技术,本技术的同轴定位组装结构100通过设置固定板20,将驱动机构30及传动轴40分别设置于固定板20的两侧,在固定板20上设有第一定位部21,传动轴40通过第一定位部21与驱动机构30的输出轴固定连接,能够提高驱动机构30的输出轴与传动轴40的同轴度,其次,本技术的同轴定位组装结构100还设置了悬置件50,悬置件50能够减小驱动机构30传递到机架10的振动,减小噪声,增大同轴定位组装结构100的使用寿命,降低成本。
26.可选地,请参阅图2及图3,图2是本技术传动轴一实施例的侧视图,图3是本技术传动轴另一实施例的结构示意图。本实施例的传动轴40包括套筒41及传动杆42。
27.套筒41包括连接的第一筒部411及第二筒部412,第一筒部411靠近驱动机构30设置,第一筒部411的外径小于第二筒部412的外径,以在第一筒部411与第二筒部412的连接处形成凸台(图未标),第一定位部21背离驱动机构30的一侧的侧壁端面与凸台抵接。
28.传动杆42设置在套筒41内,并延伸至固定板20靠近驱动机构30的一侧外,并与驱动机构30的输出轴连接。
29.套筒41通过第一筒部411与第一定位部21相互定位,第一筒部411与第一定位部21相互卡接,从而实现了传动轴40与固定板20之间的定位,使得固定板20的平面法线与传动杆42的轴线的同轴度达到较高的水平,有利于减小驱动机构30的输出轴与传动轴40的损耗。
30.可选地,请参阅图4,图4是本技术固定板一实施例的结构示意图。第一定位部21包括连接的第一孔段211及第二孔段212,第一孔段211靠近驱动机构30设置,第一孔段211的内径小于第二孔段212的内径,第一筒部411的端面与第一孔段211抵接。
31.第一孔段211内径小于第二孔段212的内径,第二孔段212的内径与第一筒部411的外径近似相等。第一孔段211与上文中的第一筒部411的端面抵接,套筒41形成的凸台与固定板20背离驱动机构30一侧面抵接。既能实现传动轴40与固定板20之间的相互定位,又可以固定套筒41。
32.可选地,请参阅图4-6,图5是本技术同轴定位组装结构第二实施例的结构示意图,图6是本技术原动机一实施例结构示意图。
33.如图4所示,固定板20靠近驱动机构30一侧设有第一限位部22,第一限位部22位于第一定位部21的外周。
34.如图6所示,驱动机构30靠近固定板20的一侧设有第二限位部311,第二限位部311位于输出轴的外周,第一限位部22与第二限位部311连接,以限定第一定位部21与输出轴之间的同轴度,进而限定传动轴40与输出轴之间的同轴度。
35.第一限位部22与第二限位部311可以为销孔或者凸起,在此不作限定。第一限位部22与第二限位部311均为销孔时,本实施例可以通过插销插入固定板20的第一限位部22与驱动机构30的第二限位部311,从而实现固定板20与驱动机构30的定位,从而保证了驱动机构30输出轴与传动轴40的轴线具有较高的同轴度,在其他实施例中,第一限位部22和第二限位部311中的一者可以为凸起部,另一者则为限位孔,凸起部与限位孔相互配合从而实现定位,在其他实施例中,第一限位部22也可不绕第一定位部21的外周设置,只需保证实现固定板20与驱动机构30的定位功能即可,且第一限位部22和第二限位部311设置的数量也不限制于本实施例中的两个,其数量不限,在此不作限定。
36.如图4所示,固定板20靠近驱动机构30的一侧设有第一螺纹孔23。如图5、图6所示,驱动机构30包括原动机31及底板32,原动机31设有输出轴的一端的端面上设置有第二限位部311及第二螺纹孔312,原动机31通过第一螺纹孔23及第二螺纹孔312与螺钉配合进行连接;底板32分别与原动机31及机架10连接。
37.在驱动机构30的第二限位部311与固定板20的第一限位部22之间相互完成定位后,本实施例的驱动机构30与固定板20可以通过第一螺纹孔23与第二螺纹孔312实现驱动机构30与固定板20的连接。本实施例可以通过螺钉穿过第一螺纹孔23与第二螺纹孔312从而实现驱动机构30与固定板20的固定,在其他实施例中,也可以采用其他方式实现驱动机构30与固定板20的固定,在此不作限定。
38.可选地,请参阅图5,本实施例的同轴定位组装结构100的悬置件50包括:第一悬置件51及第二悬置件52。
39.第一悬置件51的一侧与底板32背离固定板20的一侧连接,其背离底板32的另一侧与机架10连接。
40.第一悬置件51设置于底板32与机架10之间,用于连接底板32与机架10;其中,底板32及机架10上与第一悬置件51对应的位置可设置螺纹孔,第一悬置件51的中央可设置通孔,第一悬置件51与底板32及机架10连接时,可通过螺钉穿过机架10上的螺纹孔、第一悬置件51的通孔及底板32的螺纹孔连接底板32与机架10。
41.第二悬置件52的一侧与底板32靠近固定板20的一侧连接,其背离底板32的另一端与固定板20靠近驱动机构30的一侧连接。
42.第二悬置件52设置于固定板20与底板32之间,其中,固定板20与底板32之间与第二悬置件52对应的位置可设置螺纹孔,第二悬置件52的中央可设置通孔,第二悬置件52与固定板20及底板32连接时,可通过螺钉穿过上固定板20的螺纹孔、第二悬置件52的通孔及底板32的螺纹孔连接固定板20与底板32,并减小驱动机构30传递到固定板20的振动,从而减小传递到机架10的振动。
43.在其他实施例中,第一悬置件51及第二悬置件52的连接方式也可通过其他方式与其他结构进行连接,并不局限于本实施例的螺钉连接方式。
44.第一悬置件51与第二悬置件52都可以采用柔性材料制成,例如橡胶悬置块。通过设置第一悬置件51及第二悬置件52可以减少振动对传动轴40与输出轴同轴度的影响。
45.第一悬置件51与第二悬置件52并不局限于本实施例中的圆柱形,也可以为其他形状,在此不作限定,第一悬置件51与第二悬置件52在其他实施例中也可以为其他减震结构,只需实现减震的功能即可,在此不作限定。
46.本实施例通过第一悬置件51与第二悬置件52将驱动机构30分别与固定板20与机架10连接,可以有效地为驱动机构30的底板32提供支撑,其次,使用柔性材料制成悬置件可以避免驱动机构30的过定位问题,并减少驱动机构30传递到机架10的振动。
47.可选地,请参阅图3、图4及图7,图7本技术同轴定位组装结构第三实施例的结构示意图。驱动机构30包括原动机31及定位板33,定位板33具有连接的第一板体(图未标)及第二板体(图未标),第一板体与第二板体垂直设置,第一板体上设置有第二定位部331、第三限位部332及第三螺纹孔333,传动杆42从第二定位部331内延伸至第一板体背离固定板20的一侧外,第三螺纹孔333与第一螺纹孔23连接,第二板体与机架10连接;原动机31其输出
轴与第一板体垂直设置,原动机31与第二板体连接。第一悬置件50与第二板体背固定板20的一侧连接。
48.传动轴40的第一筒部411与固定板20进行精定位,并通过焊接固定于机架10上。驱动机构30包括原动机31及定位板33,定位板33为l型板,第一板体与第二板体相互垂直。第一板体上的设置的第二定位部331与图4中的第一定位部21对应设置,可使传动轴40的传动杆42通过第一定位部21与第二定位部331延伸至第一板体背离固定板20的一侧外与原动机31的输出轴固定连接。
49.第一板体上的第三限位部332与图4中的第一限位部22相互配合实现定位板33与固定板20之间的相互定位,第一板体上的第三螺纹孔333与图4中的第一螺纹孔23在定位板33与固定板20定位完成后,与螺钉相互配合可以实现定位板33与固定板20的连接。第一板体的第三限位部332可以为销孔,也可以为凸起,在此不作限定。
50.在其他实施例中,第一板体与固定板20的固定方式也可以采用其他连接方式,并不局限于本实施例的螺钉与螺孔配合;且第一限位部22和第三限位部332设置的数量也不限制于本实施例中的两个,其数量不限,在此不作限定。
51.第二板体与原动机31连接,原动机31在底面两侧分别设置有安装板,安装板上设置有通孔,第二板体上也设有螺纹孔,通过螺钉穿过螺纹孔与通孔可实现原动机31与第二板体的连接。在其他实施例中,原动机31与第二板体的固定方式也可以采用其他连接方式,并不局限于本实施例的螺钉与螺孔配合。
52.可选地,悬置件50包括第三悬置件53,在第二板体在远离传动轴40的一端通过第三悬置件53与机架10连接。
53.第三悬置件53的一侧与定位板33的第二板体背离固定板20的一侧连接,其背离定位板33的第二板体的另一侧与机架10连接。
54.第三悬置件53设置于定位板33与机架10之间,用于连接定位板33与机架10;其中,定位板33及机架10上与第三悬置件53对应的位置可设置螺纹孔,第三悬置件53的中央可设置通孔,第三悬置件53与定位板33及机架10连接时,可通过螺钉穿过机架10上的螺纹孔、第三悬置件53的通孔及定位板33的螺纹孔连接定位板33与机架10。
55.在其他实施例中,第三悬置件53的连接方式也可通过其他方式与定位板33及机架10进行连接,并不局限于本实施例的螺钉连接方式。
56.第三悬置件53也可以采用柔性材料制成,例如橡胶悬置块。第三悬置件53并不局限于本实施例中的圆柱形,也可以为其他形状,在此不作限定。第三悬置件53在其他实施例中也可以为其他减震结构,只需实现减震的功能即可,在此不作限定。
57.本实施例通过第三悬置件53将驱动机构30与机架10连接,可以有效地为驱动机构30的定位板33提供支撑,其次,使用柔性材料制成悬置件可以避免驱动机构30的过定位问题,并减少驱动机构30传递到机架10的振动。
58.其中,为了提高传动轴40以及驱动机构30的输出轴的同轴度,定位板33的第一板体与第二板体之间的垂直度需要达到较高水平。本技术可以通过铸造后进行机加工的方式确保第一板体与第二板体垂直度,或以第一板体与第二板体通过螺栓连接配合精加工面定位或销定位方式确保垂直度,由于传动轴40与定位板33的第一板体相互定位,原动机31的底面与第二板体连接,本技术采用的工艺可以保证定位板的垂直度,进而保证传动轴40以
及原动机31的输出轴的同轴度,在其他实施例中,定位板33也可以通过一体cnc或者两块板体拼接的方式制成。
59.本实施例通过第一筒部411和第一定位部21实现传动轴40和固定板20之间的相互定位,定位板33通过第三限位部332实与固定板20的第一限位部22相互配合实现定位,在定位板33的第一板体与第二板体的垂直度良好时,可以提高传动轴40与原动机31的输出轴之间的同轴度。
60.可选地,请参阅图1,本技术的同轴定位组装结构100进一步包括角接件60,角接件60用于将悬置件设置在机架10上。
61.固定板20固定设置于机架10上,固定板20上设有第一定位部21;驱动机构30设置于机架10上,与固定板20相互配合定位;传动轴40位于固定板20背离驱动机构30的一侧,与机架10连接,传动轴40的一端与第一定位部21相互配合定位,并与驱动机构30的输出轴固定连接;悬置件50用于减少驱动机构30传递到机架10的振动。
62.悬置件50与机架10连接时,可以在机架10远离固定板20的一端焊接一角接件60,角接件60的两端分别与机架10的弯管连接,在其他实施例中,角接件60与机架10的连接方式也可以为螺钉固定,只需满足角接件60与机架10固定连接即可,在此不作限定。
63.设置角接件60可以实现悬置件50与机架10的连接,悬置件50中间可设置通孔,悬置件50设置于驱动机构30与机架10之间时,在角接件60及驱动机构30与悬置件50对应的位置上可设置螺纹孔,驱动机构30与机架10连接时,可通过螺钉穿过角接件60上的螺纹孔、悬置件50的通孔及驱动机构30的螺纹孔连接驱动机构30与机架10。
64.在其他实施例中,悬置件50的连接方式也可通过其他方式实现与角接件60及驱动机构30的连接,并不局限于本实施例的螺钉连接方式。
65.本技术进一步提出一种推进器,请参阅图8,图8是本技术推进器一实施例的结构示意图,本实施例的推进器200包括螺旋桨110及上述的同轴定位组装结构100。
66.本实施例中同轴定位组装结构100的传动轴的另一端与螺旋桨110连接,控制螺旋桨110进行工作。
67.以上所述仅为本技术的实施例,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1