一种高速无人艇的制作方法
1.本实用新型涉及无人艇领域,具体而言,涉及一种高速无人艇。
背景技术:
2.随着水面活动日趋频繁,水面紧急情况时有发生,且频次呈现快速增加的态势。面对在水面发生的紧急情况,急需有快速响应的水面工具能够快速到达事发地点,相关技术中高速无人艇多通过人工随艇操作,不便于满足水面环境的快速响应要求,也不便于满足全天候无人值守的要求。
3.如何发明一种高速无人艇来改善这些问题,成为了本领域技术人员亟待解决的问题。
技术实现要素:
4.为了弥补以上不足,本实用新型提供了一种高速无人艇采用水面高速无人艇可以实现远程操控,高速巡航,快速到达指定水域,可以实现远程监测,同时能够实时将现场数据通过网络回传至平台,并进行远程指挥与操作,通过这种方式可以使水面超视距任务执行更加透明,使水面无人系统具备极高的信息化水平,让水面应急水平进入全新阶段。
5.本实用新型是这样实现的:
6.一种高速无人艇包括无人艇组件和操作及控制组件。
7.所述无人艇组件包括高速无人艇部、通信天线、后摄像云台、前摄像云台和集成控制模块,所述通信天线固定连接于所述高速无人艇部的甲板上,所述后摄像云台和所述前摄像云台分别设置于所述高速无人艇部船尾和船头,所述集成控制模块设置于所述高速无人艇部内部,所述通信天线、所述后摄像云台和所述前摄像云台电性连接入所述集成控制模块,所述操作及控制组件包括远程监控平台和操作控制平台,所述集成控制模块通过所述通信天线与所述远程监控平台和所述操作控制平台进行信息交互。
8.在一种具体的实施方案中,所述高速无人艇部的船头固定连接有安装架,所述前摄像云台固定连接于所述安装架顶端。
9.在一种具体的实施方案中,所述高速无人艇部的船尾固定连接有云台安装杆,所述后摄像云台安装于所述云台安装杆顶端。
10.在一种具体的实施方案中,所述高速无人艇部包括无人艇本体和推进螺旋桨,所述无人艇本体船尾设置有动力舱,所述动力舱内设置有动力推进主机,所述推进螺旋桨固定连接于所述无人艇本体船尾外壁的下侧,动力推进主机传动连接于所述推进螺旋桨。
11.在一种具体的实施方案中,所述无人艇本体包括艇体、电池模组和油箱,所述艇体内设置有设备舱,所述集成控制模块、所述电池模组和所述油箱均设置于所述设备舱内,所述电池模组电性连接入所述集成控制模块、所述通信天线、所述后摄像云台和所述前摄像云台,所述油箱连通于所述动力推进主机。
12.在一种具体的实施方案中,所述设备舱上设置有设备舱盖件,所述设备舱盖件包
括设备舱盖、支撑板、第一挂环和伸缩驱动部,所述设备舱盖一侧铰接于所述设备舱一侧,所述支撑板固定连接于所述设备舱上侧,所述支撑板能够支撑住所述设备舱盖另一侧,所述第一挂环固定连接于所述设备舱盖下侧,所述伸缩驱动部下端通过销轴铰接于所述设备舱底端,所述伸缩驱动部上端挂接于所述第一挂环内。
13.在一种具体的实施方案中,所述伸缩驱动部包括电动推杆和第二挂环,所述第二挂环固定连接于所述电动推杆端部,所述第二挂环侧壁设置有卡槽,所述第二挂环挂接于所述第一挂环内,所述第一挂环能够穿过所述卡槽。
14.在一种具体的实施方案中,所述设备舱盖下侧的定位环,所述定位环插入所述设备舱上侧。
15.在一种具体的实施方案中,所述设备舱盖下侧的周边设置有密封圈,所述密封圈位于所述定位环外壁,所述设备舱盖将所述密封圈压紧于所述设备舱周边和所述支撑板上侧。
16.在一种具体的实施方案中,所述密封圈设置为橡胶圈。
17.本技术的有益效果是:高速无人艇部可由附近的操作控制平台进行操控。操作控制平台不仅可以发送操控指令,控制高速无人艇部执行水面移动,而且可以接收水面高速无人艇部发过来的各种数据,包括视频与船体运行参数,远程监控平台能够对该区域的有高速无人艇部进行适时监控,了解各高速无人艇部分布位置,移动速度,船体参数等动态数据,并可针对突发事件紧急调配最适合的无人艇执行任务,高速无人艇部通过通信天线与远程监控平台和操作控制平台进行信息交互,为确保操控人员能够同时及时了解高速无人艇部前后及周边情况,配置了两个可度旋转的后摄像云台和前摄像云台,集成控制模块是为船体提供与外界的数据互传及船体控制指令生成的模块,进而可以实现远程操控,高速巡航,快速到达指定水域,可以实现远程监测,同时能够实时将现场数据通过网络回传至平台,并进行远程指挥与操作,通过这种方式可以使水面超视距任务执行更加透明,使水面无人系统具备极高的信息化水平,让水面应急水平进入全新阶段。
附图说明
18.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
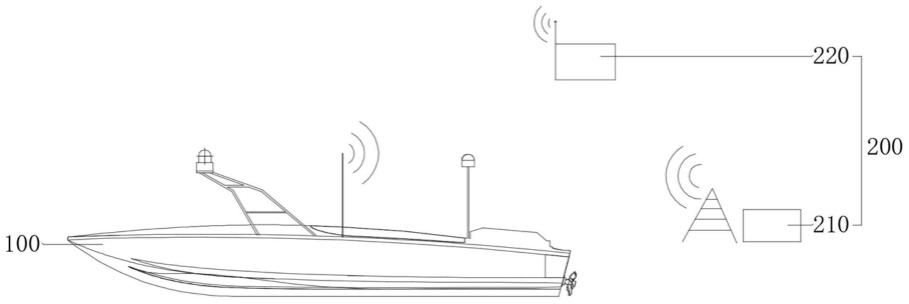
19.图1是本实用新型实施方式提供高速无人艇的结构示意图;
20.图2为本实用新型实施方式提供无人艇组件的结构示意图;
21.图3为本实用新型实施方式提供无人艇本体的结构示意图;
22.图4为本实用新型实施方式提供设备舱盖件的结构示意图;
23.图5为本实用新型实施方式提供设备舱盖关闭时的结构示意图;
24.图6为本实用新型实施方式提供的图4中a处放大的结构示意图。
25.图中:100-无人艇组件;110-高速无人艇部;111-无人艇本体;1111-艇体;1112-设备舱;1113-电池模组;1114-油箱;112-动力舱;113-推进螺旋桨;120-通信天线;130-后摄像云台;140-前摄像云台;150-集成控制模块;160-安装架;170-云台安装杆;180-设备舱盖
件;181-设备舱盖;182-支撑板;183-第一挂环;184-伸缩驱动部;1841-电动推杆;1842-第二挂环;1843-卡槽;185-定位环;186-密封圈;200-操作及控制组件;210-远程监控平台;220-操作控制平台。
具体实施方式
26.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
27.实施例
28.请参阅图1至图6,本实用新型提供一种高速无人艇,包括无人艇组件100和操作及控制组件200。
29.请参阅图2,无人艇组件100包括高速无人艇部110、通信天线120、后摄像云台130、前摄像云台140和集成控制模块150,通信天线120固定连接于高速无人艇部110的甲板上,后摄像云台130和前摄像云台140分别设置于高速无人艇部110船尾和船头,集成控制模块150设置于高速无人艇部110内部,通信天线120、后摄像云台130和前摄像云台140电性连接入集成控制模块150,需要说明的是,通信天线120、后摄像云台130、前摄像云台140和集成控制模块150之间的控制线路连接为本技术领域人员已知,在此不详细叙。操作及控制组件200包括远程监控平台210和操作控制平台220,集成控制模块150通过通信天线120与远程监控平台210和操作控制平台220进行信息交互。高速无人艇部110可由附近的操作控制平台220进行操控。操作控制平台220不仅可以发送操控指令,控制高速无人艇部110执行水面移动,而且可以接收水面高速无人艇部110发过来的各种数据,包括视频与船体运行参数。远程监控平台210能够对该区域的有高速无人艇部110进行适时监控,了解各高速无人艇部110分布位置,移动速度,船体参数等动态数据,并可针对突发事件紧急调配最适合的无人艇执行任务。高速无人艇部110通过通信天线120与远程监控平台210和操作控制平台220进行信息交互。为确保操控人员能够同时及时了解高速无人艇部110前后及周边情况,配置了两个可360度旋转的后摄像云台130和前摄像云台140,集成控制模块150是为船体提供与外界的数据互传及船体控制指令生成的模块,进而可以实现远程操控,高速巡航,快速到达指定水域,可以实现远程监测,同时能够实时将现场数据通过网络回传至平台,并进行远程指挥与操作,通过这种方式可以使水面超视距任务执行更加透明,使水面无人系统具备极高的信息化水平,让水面应急水平进入全新阶段。
30.在本实施例中,高速无人艇部110的船头固定连接有安装架160,前摄像云台140固定连接于安装架160顶端。高速无人艇部110的船尾固定连接有云台安装杆170,后摄像云台130安装于云台安装杆170顶端。通过安装架160和云台安装杆170提升前摄像云台140和后摄像云台130的安装位置,减少高速无人艇部110上的部件对前摄像云台140和后摄像云台130监控视线的影响,便于高速无人艇部110前后及周边情况。高速无人艇部110包括无人艇本体111和推进螺旋桨113,无人艇本体111船尾设置有动力舱112,动力舱112内设置有动力推进主机,推进螺旋桨113固定连接于无人艇本体111船尾外壁的下侧,动力推进主机传动
连接于推进螺旋桨113。通过动力舱112内的动力推进主机驱动推进螺旋桨113进行高效推进,使无人艇本体111能够在水面高速移动。
31.请参阅图3,无人艇本体111包括艇体1111、电池模组1113和油箱1114,艇体1111内设置有设备舱1112,集成控制模块150、电池模组1113和油箱1114均设置于设备舱1112内,电池模组1113电性连接入集成控制模块150、通信天线120、后摄像云台130和前摄像云台140,油箱1114连通于动力推进主机。油箱主要用于给动力舱112内的动力推进主机提供燃料。电池模组1113可为艇体1111上有用电设备提供不同类型的电能输送。电池主要是给电源模组提供电能。
32.请参阅图4和图5,设备舱1112上设置有设备舱盖件180,设备舱盖件180包括设备舱盖181、支撑板182、第一挂环183和伸缩驱动部184,设备舱盖181一侧铰接于设备舱1112一侧,支撑板182固定连接于设备舱1112上侧,支撑板182能够支撑住设备舱盖181另一侧,第一挂环183固定连接于设备舱盖181下侧,伸缩驱动部184下端通过销轴铰接于设备舱1112底端,伸缩驱动部184上端挂接于第一挂环183内。设备舱盖181下侧的定位环185,定位环185插入设备舱1112上侧。通过定位环185便于定位设备舱盖181的位置。设备舱盖181下侧的周边设置有密封圈186,密封圈186位于定位环185外壁,设备舱盖181将密封圈186压紧于设备舱1112周边和支撑板182上侧。密封圈186设置为橡胶圈。通过橡胶圈便于提高设备舱盖181和设备舱1112连接处的密封性,主要用于防止水流入船体的电子设备。
33.请参阅图6,伸缩驱动部184包括电动推杆1841和第二挂环1842,第二挂环1842固定连接于电动推杆1841端部,第二挂环1842侧壁设置有卡槽1843,第二挂环1842挂接于第一挂环183内,第一挂环183能够穿过卡槽1843。当需要打开设备舱盖181进行设备舱1112内设备维护时,启动电动推杆1841,电动推杆1841推动第一挂环183,第一挂环183推动设备舱盖181翻转打开,减少人力翻转打开设备舱盖181的情况,当电动推杆1841损坏,需要更换或者维修时,人工推动设备舱盖181,使第二挂环1842上的卡槽1843和第一挂环183对齐,转动电动推杆1841,电动推杆1841带动第二挂环1842通过卡槽1843离开第一挂环183,再解除电动推杆1841下端的铰接销轴,便可完成拆卸,拆卸过程简单、快捷。
34.具体的,该高速无人艇的工作原理:高速无人艇部110可由附近的操作控制平台220进行操控。操作控制平台220不仅可以发送操控指令,控制高速无人艇部110执行水面移动,而且可以接收水面高速无人艇部110发过来的各种数据,包括视频与船体运行参数。远程监控平台210能够对该区域的有高速无人艇部110进行适时监控,了解各高速无人艇部110分布位置,移动速度,船体参数等动态数据,并可针对突发事件紧急调配最适合的无人艇执行任务。高速无人艇部110通过通信天线120与远程监控平台210和操作控制平台220进行信息交互。为确保操控人员能够同时及时了解高速无人艇部110前后及周边情况,配置了两个可360度旋转的后摄像云台130和前摄像云台140,集成控制模块150是为船体提供与外界的数据互传及船体控制指令生成的模块,进而可以实现远程操控,高速巡航,快速到达指定水域,可以实现远程监测,同时能够实时将现场数据通过网络回传至平台,并进行远程指挥与操作,通过这种方式可以使水面超视距任务执行更加透明,使水面无人系统具备极高的信息化水平,让水面应急水平进入全新阶段。
35.当需要打开设备舱盖181进行设备舱1112内设备维护时,启动电动推杆1841,电动推杆1841推动第一挂环183,第一挂环183推动设备舱盖181翻转打开,减少人力翻转打开设
备舱盖181的情况,当电动推杆1841损坏,需要更换或者维修时,人工推动设备舱盖181,使第二挂环1842上的卡槽1843和第一挂环183对齐,转动电动推杆1841,电动推杆1841带动第二挂环1842通过卡槽1843离开第一挂环183,再解除电动推杆1841下端的铰接销轴,便可完成拆卸,拆卸过程简单、快捷。
36.需要说明的是,电池模组1113、通信天线120、后摄像云台130、前摄像云台140、集成控制模块150和电动推杆1841具体的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘。
37.电池模组1113、通信天线120、后摄像云台130、前摄像云台140、集成控制模块150和电动推杆1841的供电及其原理对本领域技术人员来说是清楚的,在此不予详细说明。
38.以上仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1