一种船舶的分段式半主动升沉补偿系统及补偿方法
本发明涉及海上转移作业装备,具体涉及一种船舶的分段式半主动升沉补偿系统及补偿方法。
背景技术:
1、随着陆地资源不断勘探和开发,可利用资源前景十分有限,故海洋资源勘探技术越来越受关注。在海上作业期间,需要使用绞车装置移动设备,例如海上起重作业、近岸货物卸载以及深海机器人的释放和回收。然而,在环境复杂的海上,船舶会受到海浪和海风的影响,导致剧烈的升沉运动,这会降低海上作业精度,甚至会使缆绳断裂、损坏起重设备,十分危险。升沉补偿系统的目的是将负载运动和船舶升沉运动解耦,使负载的垂直运动不受船舶运动的影响,减少缆绳张力的变化。所以为了保证负载平稳不受船舶的升沉影响,升沉补偿运动的研究十分重要。
2、目前升沉补偿系统按照补偿形式主要有三种:被动升沉补偿系统、主动升沉补偿系统和半主动升沉补偿系统。被动升沉补偿系统是一种不需要输入能量即可工作的开环系统,大多采用一个弹簧-阻尼器系统,但是补偿精度较低,补偿严重滞后。主动升沉补偿系统是一种耗能的复杂闭环系统,运动参考单元测量实际的船舶运动,采集数据反馈给控制系统,控制系统控制补偿装置抵消船舶升沉运动。虽然主动升沉补偿系统可以提高补偿效率和精度,但是消耗能量过高,数据的采集和反馈需要一定的时间。半主动升沉补偿系统是被动和主动升沉补偿系统的复合模型,拥有两种升沉补偿系统的特点。在满足工作精度要求的前提下,半主动升沉补偿系统消耗的能量大幅度降低。目前,如何提高半主动升沉补偿的精度和改善结构是急需解决的重要问题。
3、jianxing leng(control strategy for performing predictions for a semi-active compensation system[j].ocean engineering,2021,239:109816)提出了一种半主动升沉补偿系统的预测和控制策略,使用遗传算法改进的自回归方法预测船舶倾斜的位置,然后根据系统的动态模型设计了自适应后退滑模控制器,最后在六自由度平台上验证系统的补偿性能。但是该方法使用的预测模型精度不够,bilstm更适合于预测海上时间序列的数据。
4、中国专利文献cn 207774673u提出了一种起重机的液压缸式半主动升沉补偿装置,活塞杆移动并联两个动滑轮的一端,使得补偿位移增大四倍,补偿速度减小为原来的四分之一,缓解了液压缸式升沉补偿器行程短的问题。但是缆绳受到反复弯折,容易弯曲疲劳断裂。
5、中国专利文献cn 111573545a提出了一种分布式节能型主被动复合升沉补偿系统及其工作方法,结合了主动和被动升沉补偿方式,提高精度的同时减少了能量消耗。但是末端与被动补偿器连接,补偿性能不稳定,且负载不仅升沉位移,还会左右摇摆晃动。
技术实现思路
1、本发明提供了一种船舶的分段式半主动升沉补偿系统及补偿方法,以解决现有技术中补偿系统补偿位移不足、补偿精度低以及控制算法鲁棒性弱等技术问题。
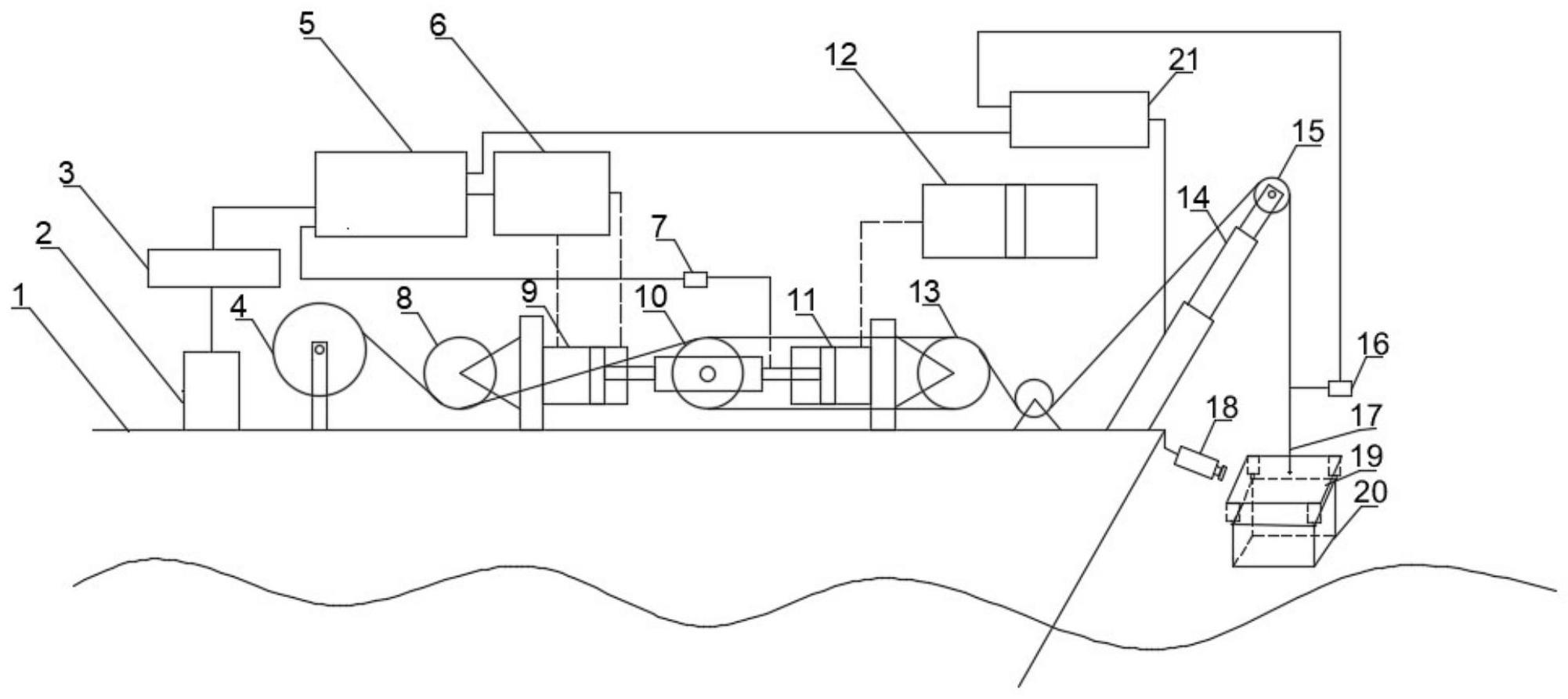
2、本发明提供了一种船舶的分段式半主动升沉补偿系统,包括:主动升沉补偿组件、被动补偿升沉组件,还包括:运动参考模块、升沉预测模块、终端滑模控制器;
3、运动参考模块安装在船舶上,对船舶的六自由度运动数据进行采集;升沉预测模块的输入端与运动参考模块连接,升沉预测模块用于预测船舶的升沉位移量;终端滑模控制器的输入端分别与升沉预测模块的输出端、主动升沉补偿组件中位移传感器连接,终端滑模控制器的输出端与主动升沉补偿组件中主动补偿液压缸的控制器连接,终端滑模控制器用于根据预测船舶的升沉位移量对进入主动升沉补偿组件中主动补偿液压缸的油量进行控制。
4、进一步地,所述船舶的分段式半主动升沉补偿系统还包括:位移与速度传感器、可伸缩液压杆、pid控制器;
5、可伸缩液压杆的固定端固定在船舶上,可伸缩液压杆的可伸缩端上设有第二动滑轮,从主动升沉补偿组件出来的缆绳先绕过可伸缩液压杆上的第二动滑轮再与负载连接;位移与速度传感器固定于负载端的缆绳上;pid控制器的输入端分别与位移与速度传感器、终端滑模控制器的输出端连接,pid控制器的输出端与可伸缩液压杆的伸缩控制端连接,pid控制器根据终端滑模控制器的输出数据、位移与速度传感器的采集数据对可伸缩液压杆的伸缩进行调节。
6、进一步地,所述船舶的分段式半主动升沉补偿系统还包括:摄像头、伸缩杆、调节控制器、吊装平板;
7、摄像头安装在船舶上,朝向被吊物;吊装平板朝向被吊物的一面上阵列排布数个伸缩杆;伸缩杆的固定端固定在吊装平板上,伸缩杆的伸缩端设有吊被吊物的吊钩;调节控制器的输入端与摄像头连接,调节控制器的输出端与伸缩杆的伸缩控制端连接,调节控制器根据摄像头采集的被吊物姿态控制伸缩杆伸缩调整被吊物姿态;缆绳与吊装平板连接,通过吊装平板吊装被吊物。
8、本发明还提供了一种船舶的分段式半主动升沉补偿系统的补偿方法,可以有效解决液压缸补偿升沉位移不足的缺点,包括:滑模升沉补偿过程、pid补偿过程;
9、其中,滑模升沉补偿过程包括:
10、步骤a1:运动参考模块获取当前船舶的升沉数据;
11、步骤a2:升沉预测模块根据获取的升沉数据,对船舶升沉状态进行预测;
12、步骤a3:终端滑模控制器根据升沉预测模块的预测数据以及主动升沉补偿组件中动滑轮的位移数据产生升沉补偿量信号;
13、步骤a4:主动升沉补偿组件根据主动补偿量信号进行升沉补偿,完成升沉补偿过程。
14、进一步地,所述pid补偿过程包括:当终端滑模控制器产生的升沉补偿量超过主动升沉补偿组件的最大补偿量时的补偿过程,具体为:
15、步骤b1:终端滑模控制器产生过量补偿量信号;
16、步骤b2:位移与速度传感器获取当前被吊物的位移数据信号、速度数据信号;
17、步骤b3:pid控制器根据过量补偿量信号、位移数据信号、速度数据信号产生控制可伸缩液压杆的伸缩量信号;
18、步骤b4:可伸缩液压杆根据伸缩量信号进行伸缩,完成pid补偿过程。
19、进一步地,所述pid补偿过程包括:当终端滑模控制器产生的升沉补偿量未超过主动升沉补偿组件的最大补偿量,且位移与速度传感器获取当前被吊物的位移数据信号、速度数据信号均超过预设阀值时的补偿过程,具体为:
20、步骤c1:位移与速度传感器获取当前被吊物的位移数据信号、速度数据信号;
21、步骤c2:pid控制器根据位移数据信号、速度数据信号产生控制可伸缩液压杆的伸缩量信号;
22、步骤c3:可伸缩液压杆根据伸缩量信号进行伸缩,完成pid补偿过程。
23、进一步地,所述船舶的分段式半主动升沉补偿系统的补偿方法还包括姿态调整过程,具体为:
24、步骤d1:摄像头采集被吊物当前图像;
25、步骤d2:构建坐标系,将图像放入坐标系中,通过通信模块获取被吊物姿态坐标;
26、步骤d3:根据被吊物的姿态坐标获取姿态偏差量;
27、步骤d4:调节控制器根据偏差量调节伸缩杆的伸缩量对被吊物姿态进行调整,完成姿态调整过程。
28、进一步地,所述步骤a3中终端滑模控制器中的状态方程为:
29、
30、式中,k1=mp+16m,mp为活塞杆质量,m为负载质量;bp为1639n·s/m,ak为液压缸被动腔k的作用面积;a2为主动缸活塞面积;βe为有效体积弹性模量;v0为蓄能器的容积;ksv为比例环节,ps为供油油压。
31、进一步地,所述步骤a3中终端滑模控制器的稳定条件为:
32、
33、式中,c为设计的滑模面;e为实际与预测的偏差;ui为电流信号;p为终端滑模的多项式。
34、本发明的有益效果:
35、本发明滑模升沉补偿补偿过程补偿大部分升沉负载位移,升沉补偿率达85-90%。使用预测模型预测船舶升沉数据,有效的缩短了负载位移的时滞,终端滑模控制使得滑模面跟踪误差能够在有限的时间内收敛到零,补偿精度和补偿效率得到提高。
36、本发明pid补偿过程不仅采集实时的负载位移数据信号、速度数据信号,进一步补偿船舶升沉位移误差,位移补偿率达93%左右,而且提供了一种解决半主动升沉补偿系统位移不足的办法,超出位移部分的控制信号,控制伸缩液压杆补偿过大的负载升沉位移。
37、本发明姿态调整过程是为了保证负载的平稳性,提高补偿精度,在复杂环境的海上,减小缆绳疲劳强度以及避免负载晃动带来的危险。
- 还没有人留言评论。精彩留言会获得点赞!