一种水下利用仿章鱼触手吸粘打捞的工艺方法与流程
本发明涉及打捞,尤其涉及一种水下利用仿章鱼触手吸粘打捞的工艺方法。
背景技术:
1、水下打捞是打捞沉没于水中物体的工程,包括打捞船舶、飞行器、货物等。在航道、港口水域中的打捞作业,可达到清理通航障碍物的目的,打捞是一项综合性技术,涉及测量、潜水、水下切割、封堵、水下爆破和水下焊接等等;
2、传统的打捞方法是通过在目标物体上进行湿式焊接连接吊索,然后通过吊索将目标物体打捞起,这种水下湿式焊接方法焊接的焊缝质量不高、可靠性较差,对于水下受力构件的焊接不适用,整体焊接作业非常麻烦,而且针对一些小型目标构件,也有采用磁铁吸附的方式进行打捞,然而磁铁吸附只能适配一些金属构件,适用范围狭隘,因此,本发明提出一种水下利用仿章鱼触手吸粘打捞的工艺方法以解决现有技术中存在的问题。
技术实现思路
1、针对上述问题,本发明提出一种水下利用仿章鱼触手吸粘打捞的工艺方法,该水下利用仿章鱼触手吸粘打捞的工艺方法整个过程通过仿章鱼触手吸粘装置进行吸附提升,无需焊接,操作方便,适配多种特殊目标物,可与多种材质黏合,适用范围广。
2、为实现本发明的目的,本发明通过以下技术方案实现:一种水下利用仿章鱼触手吸粘打捞的工艺方法,包括以下步骤:
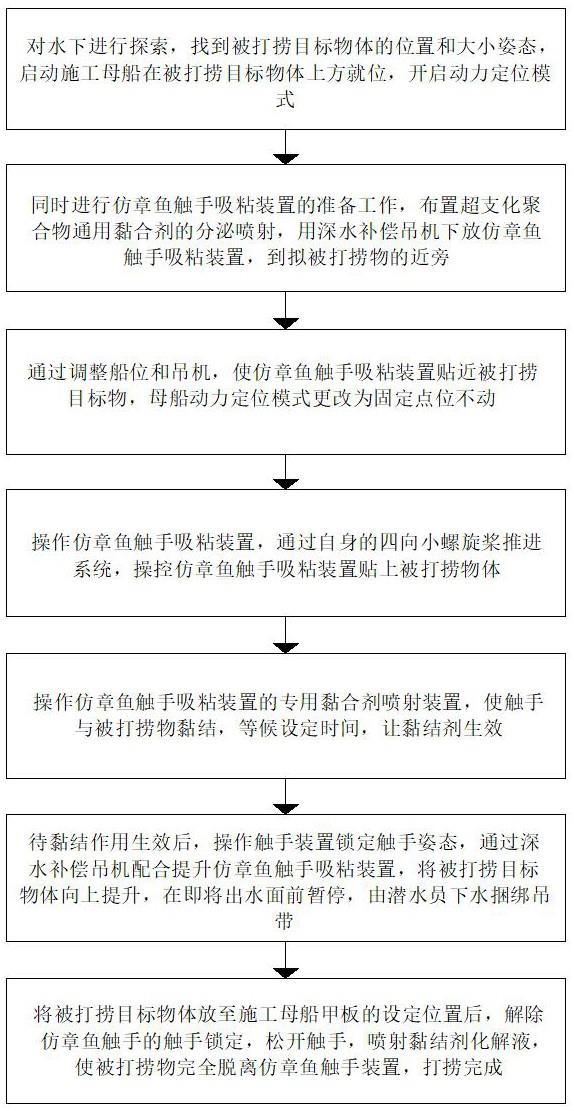
3、s1:对水下进行探索,找到被打捞目标物体的位置和大小姿态,启动施工母船在被打捞目标物体上方就位,开启动力定位模式;
4、s2:同时进行仿章鱼触手吸粘装置的准备工作,布置超支化聚合物通用黏合剂的分泌喷射,用深水补偿吊机下放仿章鱼触手吸粘装置,到拟被打捞物的近旁;
5、s3:通过调整船位和吊机,使仿章鱼触手吸粘装置贴近被打捞目标物,母船动力定位模式更改为固定点位不动;
6、s4:操作仿章鱼触手吸粘装置,通过自身的四向小螺旋桨推进系统,操控仿章鱼触手吸粘装置贴上被打捞物体;
7、s5:操作仿章鱼触手吸粘装置的专用黏合剂喷射装置,使触手与被打捞物黏结,等候设定时间,让黏结剂生效;
8、s6:待黏结作用生效后,操作触手装置锁定触手姿态,通过深水补偿吊机配合提升仿章鱼触手吸粘装置,将被打捞目标物体向上提升,在即将出水面前暂停,由潜水员下水捆绑吊带;
9、s7:将被打捞目标物体放至施工母船甲板的设定位置后,解除仿章鱼触手的触手锁定,松开触手,喷射黏结剂化解液,使被打捞物完全脱离仿章鱼触手装置,打捞完成。
10、进一步改进在于:所述s1中,利用水下扫测或用观察级rov进行探索。
11、进一步改进在于:所述s1中,开启动力定位模式后,进行动力定位准备测试,直至测试完成并达标。
12、进一步改进在于:所述s2中,采用遇水即黏,可以打破水化层限制的黏合剂,具备与多种材质黏合的功能。
13、进一步改进在于:所述s3中,使仿章鱼触手吸粘装置贴近被打捞目标物,在贴近的范围控制在0.2m-1m时,将母船动力定位模式更改为固定点位不动。
14、进一步改进在于:所述s4中,操作触手时,将其伸入被打捞物的下部可承受托力的点位,进行抱紧。
15、进一步改进在于:所述s5中,按照被打捞物的不同情形,等候15-30min,让黏结剂生效。
16、进一步改进在于:所述s6中,先微幅度提升仿章鱼触手吸粘装置,观察是否抱紧,当触手未完全抱紧黏结,则重复s4-s6,直到吊机能顺利提升被打捞物。
17、进一步改进在于:所述s6中,潜水员下水捆绑吊带,防止吊机出水时被打捞物的意外脱落,然后选择风浪小时将被打捞物提升出水,提升出水点选在施工母船的下风口处。
18、进一步改进在于:所述s7中,打捞完成后,维保仿章鱼触手吸粘装置。
19、本发明的有益效果为:
20、1、本发明利用施工母船配合深水补偿吊机将仿章鱼触手吸粘装置贴上被打捞物体,并通过专用黏合剂喷射装置,利用黏结剂使触手与被打捞物黏结,以此将被打捞目标物体向上提升打捞而出,整个过程通过仿章鱼触手吸粘装置进行吸附提升,无需焊接,操作方便,适配多种特殊目标物,可与多种材质黏合,适用范围广。
21、2、本发明在作业前对水下进行探索,进行仿章鱼触手吸粘装置的准备工作,布置超支化聚合物通用黏合剂的分泌喷射,在施工母船到达被打捞目标物体上方时,切换为动力定位模式,在仿章鱼触手吸粘装置贴近被打捞目标物时,将母船动力定位模式更改为固定点位不动,整个过程严格控制作业前准备工作和母船配合模式,使得打捞更加可靠。
技术特征:
1.一种水下利用仿章鱼触手吸粘打捞的工艺方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种水下利用仿章鱼触手吸粘打捞的工艺方法,其特征在于:所述s1中,利用水下扫测或用观察级rov进行探索。
3.根据权利要求2所述的一种水下利用仿章鱼触手吸粘打捞的工艺方法,其特征在于:所述s1中,开启动力定位模式后,进行动力定位准备测试,直至测试完成并达标。
4.根据权利要求1所述的一种水下利用仿章鱼触手吸粘打捞的工艺方法,其特征在于:所述s2中,采用遇水即黏,可以打破水化层限制的黏合剂,具备与多种材质黏合的功能。
5.根据权利要求1所述的一种水下利用仿章鱼触手吸粘打捞的工艺方法,其特征在于:所述s3中,使仿章鱼触手吸粘装置贴近被打捞目标物,在贴近的范围控制在0.2m-1m时,将母船动力定位模式更改为固定点位不动。
6.根据权利要求1所述的一种水下利用仿章鱼触手吸粘打捞的工艺方法,其特征在于:所述s4中,操作触手时,将其伸入被打捞物的下部可承受托力的点位,进行抱紧。
7.根据权利要求1所述的一种水下利用仿章鱼触手吸粘打捞的工艺方法,其特征在于:所述s5中,按照被打捞物的不同情形,等候15-30min,让黏结剂生效。
8.根据权利要求1所述的一种水下利用仿章鱼触手吸粘打捞的工艺方法,其特征在于:所述s6中,先微幅度提升仿章鱼触手吸粘装置,观察是否抱紧,当触手未完全抱紧黏结,则重复s4-s6,直到吊机能顺利提升被打捞物。
9.根据权利要求8所述的一种水下利用仿章鱼触手吸粘打捞的工艺方法,其特征在于:所述s6中,潜水员下水捆绑吊带,防止吊机出水时被打捞物的意外脱落,然后选择风浪小时将被打捞物提升出水,提升出水点选在施工母船的下风口处。
10.根据权利要求1所述的一种水下利用仿章鱼触手吸粘打捞的工艺方法,其特征在于:所述s7中,打捞完成后,维保仿章鱼触手吸粘装置。
技术总结
本发明提供了一种水下利用仿章鱼触手吸粘打捞的工艺方法,涉及打捞技术领域,包括以下步骤:S1:对水下进行探索,找到被打捞目标物体的位置和大小姿态,启动施工母船在被打捞目标物体上方就位,开启动力定位模式;S2:同时进行仿章鱼触手吸粘装置的准备工作,布置超支化聚合物通用黏合剂的分泌喷射,用深水补偿吊机下放仿章鱼触手吸粘装置;本发明利用施工母船配合深水补偿吊机将仿章鱼触手吸粘装置贴上被打捞物体,并通过专用黏合剂喷射装置,利用黏结剂使触手与被打捞物黏结,以此将被打捞目标物体向上提升打捞而出,整个过程通过仿章鱼触手吸粘装置进行吸附提升,无需焊接,适配多种特殊目标物,可与多种材质黏合,适用范围广。
技术研发人员:彭忠卫,蒋哲,蔡荔,周怡和,戴青,王钰,周东荣
受保护的技术使用者:交通运输部上海打捞局
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!